基于结构光系统的车底震动测量方法、装置、介质及设备
本申请涉及车底震动测量,特别是涉及基于结构光系统的车底震动测量方法、装置、介质及设备。
背景技术:
1、接触网几何参数是轨道交通里列车在行驶过程中最为重要的检测目标之一,能否检测出几何参数数据异常直接决定了列车运行的安全性。目前所有接触网几何参数测量方法,都是以车顶作为基点进行观测,这意味无论检测方法的精度如何,只能得到车顶与接触网的相对位置关系。然而,真正有实际参考价值的几何参数是指的接触网与轨道的相对位置关系,而由于列车高速运行时产生的震动会使得列车与轨道面之间存在厘米级别的位移,接触网与轨道的相对位置并不与接触网与列车的相对位置划等号,而是由接触网与列车的相对位置、列车与轨道的相对位置共同组成。因此,测量出列车与轨道的震动偏移值,对几何参数进行补偿,对列车运行的安全保障十分重要。
2、目前主流的列车震动值测量方法是基于惯性传感器的测量方法,通过6自由度的加速度计、陀螺仪和磁力计来实时计算列车与轨道之间的偏移值。然而,惯性传感器针对高频率、不规律的列车震动,测量精度往往比较差,同时列车长时间运行的特性会导致累计误差越来越大,无法做到实时校准。
技术实现思路
1、鉴于以上所述现有技术的缺点,本申请的目的在于提供基于结构光系统的车底震动测量方法、装置、介质及设备,用于解决现有的车底震动测量方法累计误差越来越大,无法做到实时校准的技术问题。
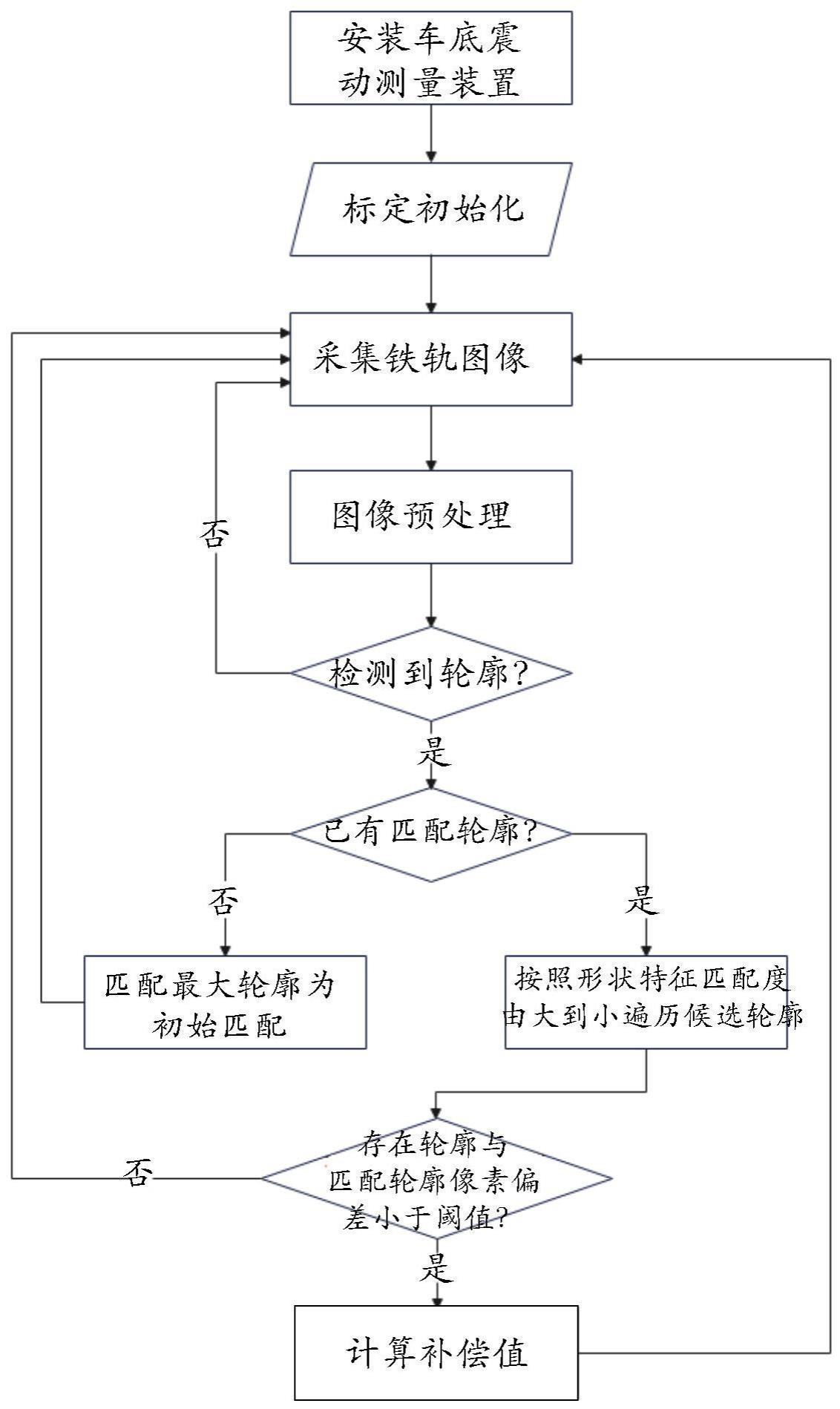
2、为实现上述目的及其他相关目的,本申请的第一方面提供一种基于结构光系统的车底震动测量方法,包括:对结构光系统进行标定;所述结构光系统包括图像采集设备及激光器;获取由标定后的图像采集设备所采集的铁轨图像,通过视觉算法定位铁轨图像中的激光线并汇总待识别的激光线数量,对所有激光线的轮廓按照形状特征匹配度降序排序;重复上述步骤直至在当前帧中检测到轮廓;若当前帧为初始帧或者上一帧没有匹配的轮廓,则选取形状特征匹配度最大的轮廓作为目标激光线的初始位置,跳到下一帧并重新执行结构光系统标定后的步骤;若上一帧存在已匹配的轮廓,则按照形状特征匹配度由大到小遍历候选轮廓;若在候选轮廓中找到与上一帧已匹配轮廓在画面中的像素偏差小于预设阈值,则基于像素偏差计算列车与轨道之间在垂直方向以及列车横向方向的位移,以作为接触网几何参数的补偿值;否则,跳到下一帧并重新执行结构光系统标定后的步骤。
3、于本申请的第一方面的一些实施例中,所述对结构光系统进行标定的结果包括:获得工业相机内参k;获得激光平面在相机坐标系中的表达:ax+by+cz+d=0;其中,x,y,z为相机坐标系下三维点坐标,a,b,c,d为激光平面系数。
4、于本申请的第一方面的一些实施例中,所述通过视觉算法定位铁轨图像中的激光线并汇总待识别的激光线数量,对所有激光线的轮廓按照形状特征匹配度降序排序,包括:对铁轨图像做预处理,其包括:对铁轨系统中亮度不够和/或所占像素面积过小的激光线使用二值化操作和腐蚀操作进行滤波处理;对铁轨图像中的激光线进行轮廓提取;对提取到的激光线轮廓进行形状特征提取,并与预设形状特征进行相似度比对,将相似度比对结果按照降序排列。
5、于本申请的第一方面的一些实施例中,所述对提取到的激光线轮廓进行形状特征提取,并与预设形状特征进行相似度比对,将相似度比对结果按照降序排列,包括:通过提取hu矩特征来提取激光线轮廓的形状特征,计算提取到的hu矩特征与预设hu矩特征之间的欧几里得距离,以计算其与预先设定的轨头形状的相似度。
6、于本申请的第一方面的一些实施例中,所述基于像素偏差计算列车与轨道之间在垂直方向以及列车横向方向的位移,以作为接触网几何参数的补偿值,其包括:将找到的当前帧轮廓与上一帧已匹配轮廓的像素偏移值投影到相机坐标系中计算出对应的三维偏移值;按照相机坐标系在列车上的安装位置与角度计算得到对应的旋转矩阵;基于所述旋转矩阵计算得到列车与轨道之间在垂直方向以及列车横向方向的位移,以作为对接触网几何参数中的导高值和拉出值的补偿值。
7、于本申请的第一方面的一些实施例中,所述接触网几何参数的补偿值的计算过程包括:定义上一帧已匹配轮廓的中心点像素坐标以及当前帧匹配轮廓的中心点像素坐标;将各像素坐标通过相机标定结果映射到相机坐标系中;将各像素坐标在相机坐标系中对应的相机坐标,根据模块按照位置转换到列车世界坐标系中得到对应的世界坐标;根据上一帧已匹配轮廓的中心点像素以及当前帧匹配轮廓的中心点像素的世界坐标,将两者世界坐标的z坐标相减得到垂直方向震动测量值以作为导高补偿值,并将两者世界坐标的x坐标相减得到水平方向震动测量值以作为拉出补偿值。
8、为实现上述目的及其他相关目的,本申请的第二方面提供一种车底震动测量装置,安装于行走列车的两侧;所述装置包括:激光发射单元,用于对目标铁轨发射激光束;图像采集单元,用于对目标铁轨进行图像采集;其中,所述图像采集单元外连一控制装置;所述控制装置接收所述图像采集单元所采集的铁轨图像后执行所述基于结构光系统的车底震动测量方法。
9、为实现上述目的及其他相关目的,本申请的第三方面提供一种车底震动测量系统,包括:至少一对安装于行走列车上的所述车底震动测量装置;所述控制装置与所述车底震动测量装置中的图像采集单元建立通信连接,以在接收所述图像采集单元所采集的铁轨图像后执行所述基于结构光系统的车底震动测量方法。
10、为实现上述目的及其他相关目的,本申请的第四方面提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述基于结构光系统的车底震动测量方法。
11、为实现上述目的及其他相关目的,本申请的第五方面提供一种计算机设备,包括:处理器及存储器;所述存储器用于存储计算机程序,所述处理器用于执行所述存储器存储的计算机程序,以使所述终端执行所述基于结构光系统的车底震动测量方法。
12、如上所述,本申请的基于结构光系统的车底震动测量方法、装置、介质及设备,具有以下有益效果:本发明通过标定相机与激光平面的相对位置关系,建立二维激光点与三维空间的映射关系,实时精准地测量列车和轨道的相对位移,并通过跟踪匹配算法实时校准,实现对几何参数的补偿,解决了目前列车震动测量方法累计误差大、无法校准的问题。
技术特征:
1.一种基于结构光系统的车底震动测量方法,其特征在于,包括:
2.根据权利要求1所述的基于结构光系统的车底震动测量方法,其特征在于,所述对结构光系统进行标定的结果包括:
3.根据权利要求1所述的基于结构光系统的车底震动测量方法,其特征在于,所述通过视觉算法定位铁轨图像中的激光线并汇总待识别的激光线数量,对所有激光线的轮廓按照形状特征匹配度降序排序,包括:
4.根据权利要求3所述的基于结构光系统的车底震动测量方法,其特征在于,所述对提取到的激光线轮廓进行形状特征提取,并与预设形状特征进行相似度比对,将相似度比对结果按照降序排列,包括:通过提取hu矩特征来提取激光线轮廓的形状特征,计算提取到的hu矩特征与预设hu矩特征之间的欧几里得距离,以计算其与预先设定的轨头形状的相似度。
5.根据权利要求1所述的基于结构光系统的车底震动测量方法,其特征在于,所述基于像素偏差计算列车与轨道之间在垂直方向以及列车横向方向的位移,以作为接触网几何参数的补偿值,其包括:
6.根据权利要求1所述的基于结构光系统的车底震动测量方法,其特征在于,所述接触网几何参数的补偿值的计算过程包括:
7.一种车底震动测量装置,其特征在于,安装于行走列车的两侧;所述装置包括:
8.一种车底震动测量系统,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1~6中任一项所述基于结构光系统的车底震动测量方法。
10.一种计算机设备,其特征在于,包括:处理器及存储器;
技术总结
本申请提供基于结构光系统的车底震动测量方法、装置、介质及设备,本发明通过标定相机与激光平面的相对位置关系,建立二维激光点与三维空间的映射关系,实时精准地测量列车和轨道的相对位移,并通过跟踪匹配算法实时校准,实现对几何参数的补偿,解决了目前列车震动测量方法累计误差大、无法校准的问题。
技术研发人员:李辰懋,吴丽,李嘉茂,郭远博,明伟,黄乔中,朱冬晨,王磊,付凤杰,张晓林
受保护的技术使用者:中国科学院上海微系统与信息技术研究所
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!