一种基于LED阵列的可见光单基站定位方法和装置与流程
本发明实施例涉及可见光定位,尤其涉及一种基于led阵列的可见光单基站定位方法和装置。
背景技术:
1、当前基于光电二极管的可见光定位方案中最为典型的做法是使用多基站(即多个分开布设的led)的定位方式。这类方案使用预先标定的测距模型和rss来测量距离,再使用距离交会的方式进行定位。其主要的缺陷有:
2、1)多个led的布设无法代替普通照明灯,额外布设造成资源浪费;
3、2)多个led灯分开布设会产生较大的布线成本,同时分开布设极大可能要求每盏灯配备一个控制器,增加额外成本;
4、3)标定灯的测距模型是一件费时费力的工作,测距模型会因每盏灯的硬件差异而有差异,另外不同环境下标定的模型也会有差异,因此需要对每盏灯在不同环境下都要进行标定;
5、4)标定的测距模型大多采用简化模型,忽略接收器倾角的影响,实际上一定大小的接收器倾角会产生较大的测距误差。
技术实现思路
1、本发明提供一种基于led阵列的可见光单基站定位方法和装置,以实现降低可见光定位的成本和提升可见光定位精度。
2、第一方面,本发明实施例提供一种基于led阵列的可见光单基站定位方法,所述led阵列为一个圆阵,且所述led阵列包括若干led灯,所述方法包括:
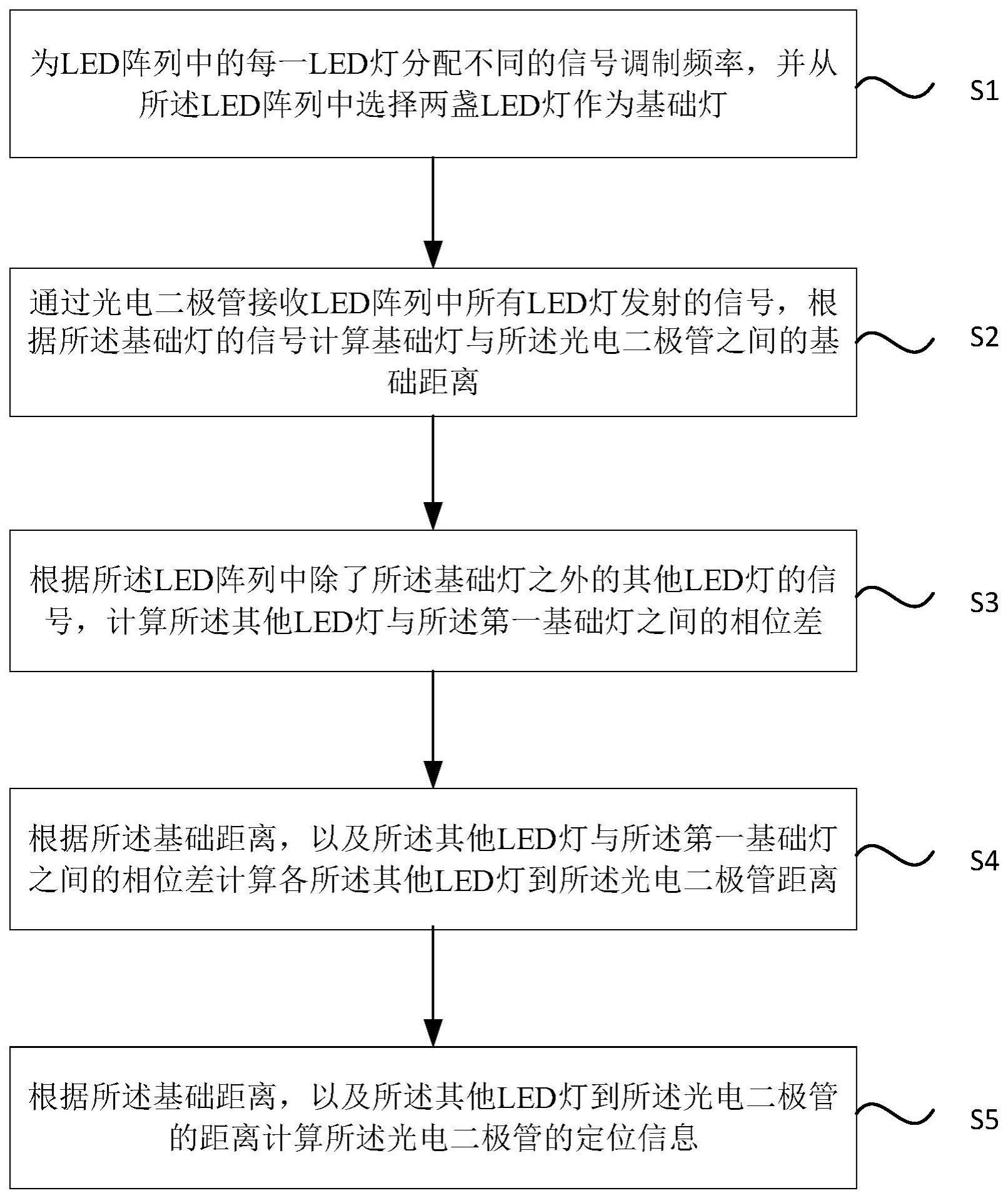
3、s1、为led阵列中的每一led灯分配不同的信号调制频率,并从所述led阵列中选择两盏led灯作为基础灯;所述基础灯包括第一基础灯和第二基础灯,所述第二基础灯仅用于基础距离的计算;
4、s2、通过光电二极管接收led阵列中所有led灯发射的信号,根据所述基础灯的信号计算基础灯与所述光电二极管之间的基础距离;
5、s3、根据所述led阵列中除了所述基础灯之外的其他led灯的信号,计算所述其他led灯与所述第一基础灯之间的相位差;
6、s4、根据所述基础距离,以及所述其他led灯与所述第一基础灯之间的相位差计算各所述其他led灯到所述光电二极管距离;
7、s5、根据所述基础距离,以及所述其他led灯到所述光电二极管的距离计算所述光电二极管的定位信息。
8、可选的,所述s1中的为led阵列中的每一led灯分配不同的信号调制频率,包括:
9、将所述led阵列中每一led灯的信号调制频率设置为所述第一基础灯信号调制频率的奇数倍。
10、可选的,所述s2包括:
11、使用带通滤波器将每一led灯的信号分离出来,将每一分离后的信号通过下变频器,得到频率统一的各led灯信号;
12、将频率统一后的第一基础灯的信号和第二基础灯的信号提取出来,并计算所述第一基础灯与所述第二基础灯之间的相位差;
13、根据所述第一基础灯与所述第二基础灯之间的相位差计算所述基础距离。
14、可选的,通过所述第一基础灯与所述第二基础灯之间的同向正交信号iq来计算所述第一基础灯与所述第二基础灯之间的相位差δφ12,公式如下:
15、
16、其中,i12为第一基础灯与第二基础灯之间的同向信号,q12为第一基础灯与第二基础灯之间的正交信号;
17、或者,通过下式来计算δφ12:
18、
19、其中,d1为第一基础灯到光电二极管之间的基础距离,d2为led阵列中第一基础灯到光电二极管之间的距离,f1为第一基础灯的信号调制频率;
20、假设d2≈f1,联立式和计算得到基础灯与所述光电二极管之间的基础距离。
21、可选的,所述s4的具体计算公式如下:
22、
23、其中,δφ1i为led阵列中第i个led灯与第一基础灯之间的相位差,f1为第一基础灯到光电二极管之间的基础距离,di为led阵列中第i个led到光电二极管之间的距离,f1为第一基础灯的信号调制频率。
24、可选的,所述s5包括:
25、使用最小二乘法,根据所述基础距离,以及所述其他led灯到所述光电二极管的距离计算所述光电二极管的定位信息。
26、可选的,所述led阵列至多包括16盏led灯。
27、第二方面,本发明实施例还提供一种基于led阵列的可见光单基站定位装置,所述led阵列为一个圆阵,且所述led阵列包括若干led灯,所述装置包括:
28、信号调制频率分配模块,用于为led阵列中的每一led灯分配不同的信号调制频率,并从所述led阵列中选择两盏led灯作为基础灯;所述基础灯包括第一基础灯和第二基础灯,所述第二基础灯仅用于基础距离的计算;
29、基础距离计算模块,用于通过光电二极管接收led阵列中所有led灯发射的信号,根据所述基础灯的信号计算基础灯与所述光电二极管之间的基础距离;
30、相位差计算模块,用于根据所述led阵列中除了所述基础灯之外的其他led灯的信号,计算所述其他led灯与所述第一基础灯之间的相位差;
31、其他距离计算模块,用于根据所述基础距离,以及所述其他led灯与所述第一基础灯之间的相位差计算各所述其他led灯到所述光电二极管距离;
32、定位信息计算模块,用于根据所述基础距离,以及所述其他led灯到所述光电二极管的距离计算所述光电二极管的定位信息。
33、可选的,所述信号调制频率分配模块中的为led阵列中的每一led灯分配不同的信号调制频率,包括:
34、将所述led阵列中每一led灯的信号调制频率设置为所述第一基础灯信号调制频率的奇数倍。
35、可选的,所述基础距离计算模块具体用于:
36、使用带通滤波器将每一led灯的信号分离出来,将每一分离后的信号通过下变频器,得到频率统一的各led灯信号;
37、将频率统一后的第一基础灯的信号和第二基础灯的信号提取出来,并计算所述第一基础灯与所述第二基础灯之间的相位差;
38、根据所述第一基础灯与所述第二基础灯之间的相位差计算所述基础距离。
39、本发明的有益效果:
40、(1)本发明提供的一种基于可见光阵列基站的单基站定位方法,通过设计一种可见光阵列布设形式,来替代多基站方案,既可以减少布线和控制器成本,同时这种形式具备替代现有照明灯的潜力和能力。
41、(2)本发明提出的基于相位差的测距方法可以彻底省去传统测距模型标定带来的工作量,且距离估计不再受限于设备差异、环境差异,极大提升了距离估计精度。
42、(3)本发明提出的基于相位差的测距方法克服了接收器倾角对测距的影响,使接收器在有较大倾角时仍能保持较高的测距和定位精度。
技术特征:
1.一种基于led阵列的可见光单基站定位方法,其特征在于,所述led阵列为一个圆阵,且所述led阵列包括若干led灯,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述s1中的为led阵列中的每一led灯分配不同的信号调制频率,包括:
3.根据权利要求1所述的方法,其特征在于,所述s2包括:
4.根据权利要求3所述的方法,其特征在于,通过所述第一基础灯与所述第二基础灯之间的同向正交信号iq来计算所述第一基础灯与所述第二基础灯之间的相位差δφ12,公式如下:
5.根据权利要求4所述的方法,其特征在于,所述s4的具体计算公式如下:
6.根据权利要求1所述的方法,其特征在于,所述s5包括:
7.根据权利要求1所述的方法,其特征在于,所述led阵列至多包括16盏led灯。
8.一种基于led阵列的可见光单基站定位装置,其特征在于,所述led阵列为一个圆阵,且所述led阵列包括若干led灯,所述装置包括:
9.根据权利要求8所述的装置,其特征在于,所述信号调制频率分配模块中的为led阵列中的每一led灯分配不同的信号调制频率,包括:
10.根据权利要求8所述的装置,其特征在于,所述基础距离计算模块具体用于:
技术总结
本发明公开了一种基于LED阵列的可见光单基站定位方法和装置。其中,该方法包括:为LED阵列中的每一LED灯分配不同的信号调制频率,并从LED阵列中选择两盏LED灯作为基础灯;通过光电二极管接收所有LED灯发射的信号,计算基础灯与光电二极管之间的基础距离;根据所述LED阵列中除了所述基础灯之外的其他LED灯的信号,计算所述其他LED灯与所述第一基础灯之间的相位差,以及各其他LED灯到光电二极管距离,进而计算出光电二极管的定位信息。本发明采用基于LED阵列的可见光单基站定位方法,减少了布线和控制器成本;采用相位差进行距离估算,规避了测距模型标定的工作量和其随设备差异、环境差异引入的测距误差,同时消除了设备倾角对测距的影响,提升了定位精度。
技术研发人员:曹晓祥,庄园
受保护的技术使用者:知微空间智能科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!