一种基于实时VOC浓度的污染源精确定位方法与流程
本发明涉及实时精确定位voc浓度的污染源的领域,具体是一种基于voc浓度的污染源精确定位方法。
背景技术:
1、voc浓度的污染不仅污染环境,对人体健康的伤害更加严重,所以voc浓度的污染要及时处理,以免对人体造成伤害,及时处理voc浓度的污染,我们首先要做的就是找到voc的污染源;
2、为了找到voc浓度的污染源,设置若干个信息采集节点,获取每个信息采集节点的voc数据,将所获得的voc数据输入计算voc浓度理论值的通用模型内,并输出voc浓度理论值,判断信息采集节点的所在区域的voc浓度是否超标,将超标的voc浓度汇总形成voc超标数据集,将voc超标数据集中各个voc理论值所对应的信息采集节点的位置映射到待测区域空间三维坐标系上,形坐标点,利用最小二乘法求通过将误差的平方和最小化来求得待定位节点位置的最佳估计值,并记待测点为p,则p点的坐标为预测voc浓度的污染源,获取voc浓度污染源的位置,并对污染源实施措施,减少对环境的污染以及对人体健康的伤害。
技术实现思路
1、本发明的目的在于提供一种基于实时voc浓度的污染源精确定位方法;
2、本发明的目的可以通过以下技术方案实现:一种基于实时voc浓度的污染源精确定位方法,包括以下步骤:
3、步骤一:在待测区域内设置若干个信息采集节点,获取每个信息采集节点的voc数据;
4、步骤二:将所获得的voc数据输入至通用模型内,并输出各个信息采集节点所获得的voc浓度理论值;
5、步骤三:根据所获得的各个信息采集节点的voc理论浓度值,判断信息采集节点的所在区域的voc浓度是否超标;
6、步骤四:对导致voc浓度超标的污染源进行定位。。
7、进一步的,所述信息采集节点的设置于房区域。
8、进一步的,所述待测区域获得voc数据的过程包括:
9、在子区域内的指定位置安装数据采集终端,对数据采集终端的所在位置的进行标记,对数据采集终端设定周期检测时间,并在周期检测时间内连续采集voc数据,对所获取到的voc数据进行汇总,并形成voc数据集。
10、进一步的,所述voc数据集内存在多个元素,每个元素对应一个voc数据种类和水的含量。
11、进一步的,所述通用模型的建立过程包括:
12、根据上述所采集voc数据集进行模拟计算,建立voc浓度通用模型为cx=(nx-h2o)×dw×1000×100%,其中x为voc数据集内的不同voc数据种类,nx为voc数据种类x对应的含量,h20为水的含量,dw为水的密度,将所获得的voc数据集输入计算voc浓度理论值的通用模型,将所获得的voc浓度的理论值与对应的voc浓度标准值进行对比,根据对比结果判断voc浓度的理论值是否超标,并根据超标的voc浓度的理论值获得voc超标数据集。
13、进一步的,将voc超标数据集中各个voc理论值所对应的信息采集节点的位置映射到待测区域空间三维坐标系上,形成坐标点,并利用最小二乘法算法进行预测导致voc浓度超标的污染源位置。
14、进一步的,利用最小二乘法的算法预测voc浓度的污染源的过程包括:
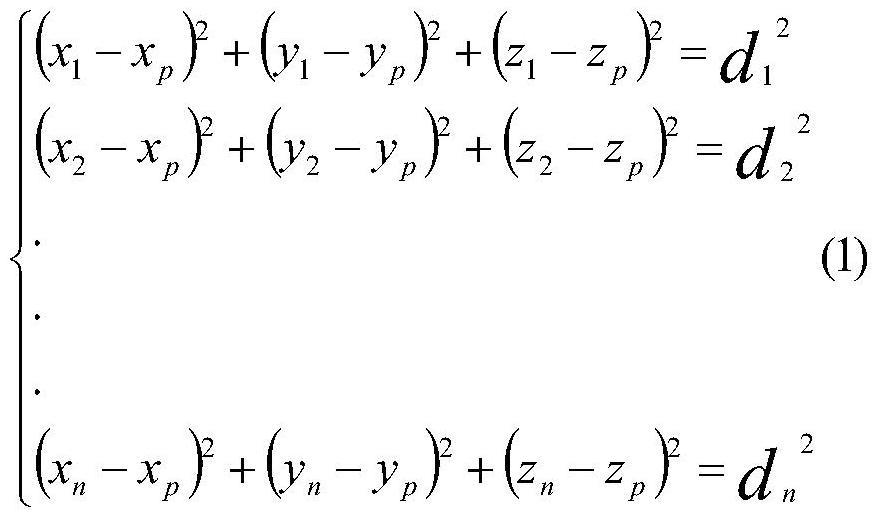
15、利用最小二乘法求通过将误差的平方和最小化来求得待定位节点位置的最佳估计值p,则p点为预测voc浓度的污染源,进一步的,计算过程如下:假设三维坐标系上映射了n个超标voc浓度的坐标点(n≥4),坐标点的坐标分别为(x1,y1,z1),(x2,y2,z2)......(xn,yn,zn),设待求的voc浓度的污染源位置坐标为p(xp,yp,zp),污染源位置与voc超标数据集对应的位置之前的距离为d1,d2,d3......dn,则有:
16、
17、整理后得:
18、
19、其中,kn=xn2+yn2+zn2,n=1,2...;
20、由两式相减可得:
21、
22、其中,xn-1=xn-xn-1,yn-1=yn-yn-1,zn-1=zn-zn-1,kn-1=kn-kn-1,n=2,3...;
23、令:
24、
25、则:
26、即可得出voc浓度的污染源坐标p(xp,yp,zp)。
27、利用精确定位voc浓度的污染源,解决voc浓度造成环境的污染以及对人体健康造成的危害,利用最小二乘法求通过将误差的平方和最小化来求得待定位节点位置的最佳估计值,则节点p为预测voc浓度的污染源,从而解决实际问题。
技术特征:
1.一种基于实时voc浓度的污染源精确定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于实时voc浓度的污染源精确定位方法,其特征在于,所述信息采集节点的设置于房区域。
3.根据权利要求2所述的一种基于实时voc浓度的污染源精确定位方法,其特征在于,所述待测区域获得voc数据的过程包括:
4.根据权利要求3所述的一种基于实时voc浓度的污染源精确定位方法,其特征在于,所述voc数据集内存在多个元素,每个元素对应一个voc数据种类和水的含量。
5.根据权利要求4所述的一种基于实时voc浓度的污染源精确定位方法,其特征在于,所述通用模型的建立过程包括:
6.根据权利要求5所述的一种基于实时voc浓度的污染源精确定位方法,其特征在于,对所述获得的voc理论值是否超标的判定过程包括:
7.根据权利要求6所述的一种基于实时voc浓度的污染源精确定位方法,其特征在于,将voc超标数据集中各个voc理论值所对应的信息采集节点的位置映射到待测区域空间三维坐标系上,形成坐标点,并利用最小二乘法算法进行预测导致voc浓度超标的污染源位置。
技术总结
本发明公开了一种基于VOC浓度的污染源精确定位方法,涉及利用VOC浓度精确定位污染源的领域,包括设置若干个信息采集节点,获取每个信息采集节点的VOC数据,将所获得的VOC数据输入计算VOC浓度理论值的通用模型内,并输出VOC浓度理论值,判断信息采集节点的所在区域的VOC理论值是否超标,将超标的VOC浓度汇总形成VOC超标数据集,并将VOC超标数据集中各个VOC理论值所对应的信息采集节点的位置映射到待测区域空间三维坐标系上,利用最小二乘法求通过将误差的平方和最小化来求得待定位节点位置的最佳估计值,则节点P的坐标为预测VOC浓度的污染源坐标,并对污染源进行处理,减低对环境以及人体健康的危害。
技术研发人员:李儒超,李大伟,赵燕,平翌,区国权,杨豪辉
受保护的技术使用者:珠海鼎正国信科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!