一种基于双轴光纤陀螺的定向测姿系统、方法、介质与流程
本发明涉及光纤陀螺测姿,尤其是涉及一种基于双轴光纤陀螺的定向测姿系统、方法、介质。
背景技术:
1、在物探领域终,随着地下钻探要求中的无人化、智能化、数字化要求的不断提升,对地下钻探测量精度要求不断提高,急需一种高精度,低成本,高效率的姿态航向测量设备。目前测量设备主要有二种方式:磁罗盘法和光纤陀螺静基座寻北法。
2、下面对这二种方式的弊端分别进行分析。
3、磁罗盘法存在以下弊端:
4、(1)磁罗盘精度低一般航向角只能达到±1.5°;
5、(2)需要无磁钢做外套,成本及加工难度大;
6、(3)容易被铁磁物质干扰;
7、(4)不能在测量中进行自标定。
8、光纤陀螺静基座寻北方式存在以下弊端:
9、(1)一般采用三轴高精度光纤陀螺进行制作,成本较高;
10、(2)为确保精度,寻北时间一般需3分钟以上,寻北期间不能移动;
11、(3)寻北后,持续功耗在1.2w以上,续航能力低。
12、中国专利申请号cn202010732972.5公开了一种便携式三轴光纤陀螺测姿系统,包括三轴光纤陀螺、姿态和重力传感器和支撑整个系统的架体,三轴光纤陀螺包括光源组件和探测组件,探测组件连接有控制解算存储通讯电路,便携式三轴光纤陀螺测姿系统还包括光源控制电路、电源控制电路和三轴mems imu,光源控制电路用于为光源组件中的光源的供电,电源控制电路用于控制三轴光纤陀螺的供电,姿态和重力传感器连接探测组件,光源控制电路、电源控制电路和三轴mems imu均连接控制解算存储通讯电路与现有技术相比,该申请采用光纤陀螺静基座寻北方式,具有降低了功耗、延长了使用时间、抗冲击和抗振动性能好的特点。但是,该申请采用三轴高精度光纤陀螺,制作成本较高,此外,寻北时间一般为3分钟以上,寻北期间不能移动,寻北后的功耗也较大。
13、综上,当前缺少一种定向测姿系统,以解决现有的定向测姿系统中带动双轴光纤陀螺转动的结构较为复杂,导致测姿系统便携性差的问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于双轴光纤陀螺的定向测姿系统、方法、介质,以解决或部分解决现有的定向测姿系统中带动双轴光纤陀螺转动的结构较为复杂的问题。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明的一个方面,提供了一种基于双轴光纤陀螺的定向测姿系统,包括:
4、步进电机,包括基于涡轮蜗杆的减速器,所述步进电机与电机驱动模块连接;
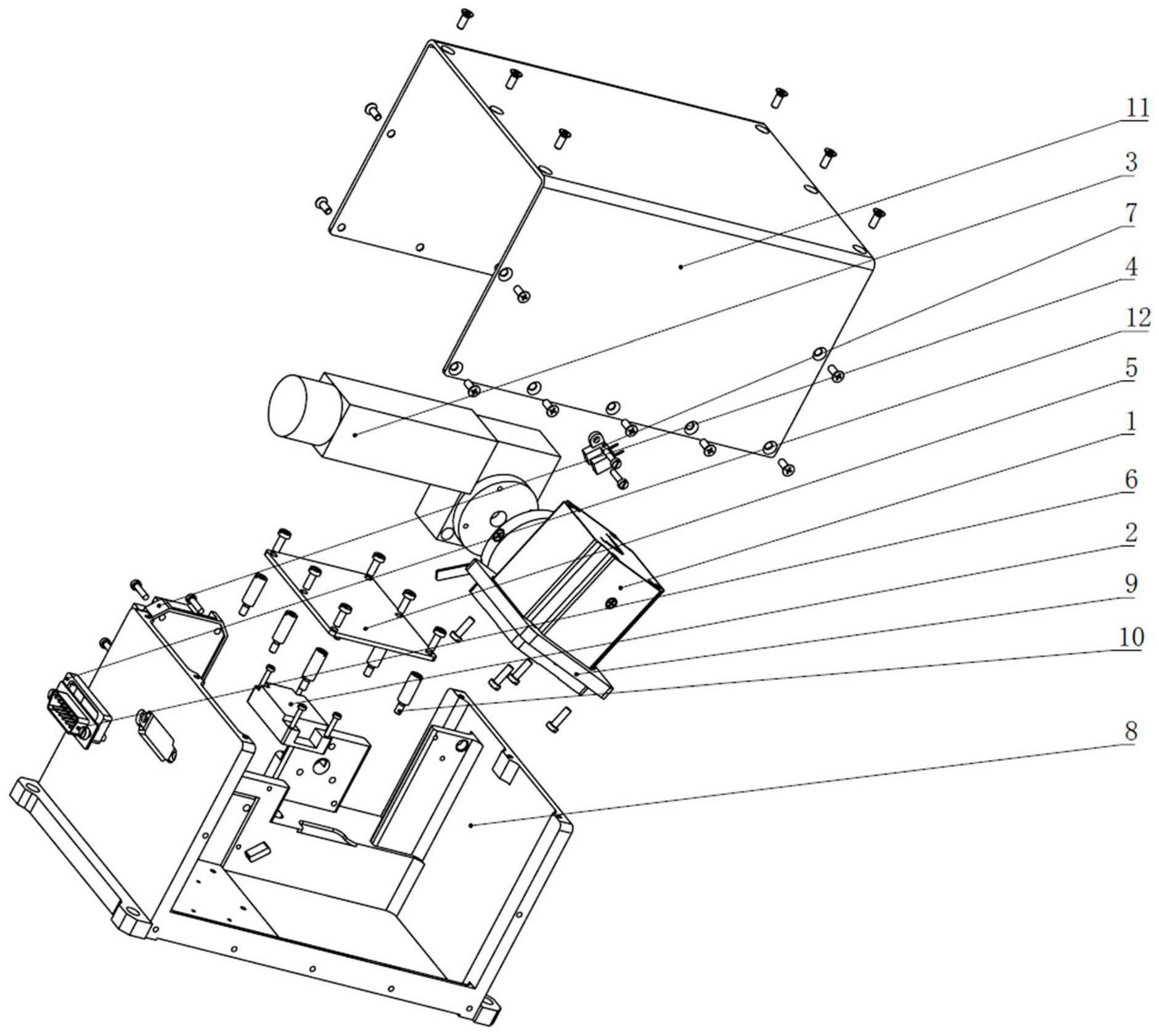
5、双轴光纤陀螺仪,用于获取寻北定姿所需的原始数据,所述双轴光纤陀螺仪通过台体安装在所述步进电机上,所述台体上设置有止动块,以所述步进电机的转轴为参考,所述止动块用于将所述台体机械限位于两个相隔180°的预设位置处;
6、惯性测量单元,用于在寻北前获取倾角补偿参数,在寻北后持续获取系统的姿态信息;
7、主控模块,用于控制所述步进电机转动到所述预设位置并获取所述双轴光纤陀螺仪的原始数据,根据所述原始数据获取北向基准值,在获取所述北向基准值后基于所述姿态信息持续进行姿态测定。
8、作为优选的技术方案,所述的双轴光纤陀螺仪包括:
9、光源模块,包括光源、耦合器以及两个相互独立的检测子模块;
10、光源控制电路,用于针对所述光源模块实现sld恒流以及管芯温度控制;
11、信号处理电路,用于实现光纤陀螺的闭环控制,并提供角速率数据。
12、作为优选的技术方案,每个所述的检测子模块均包括光纤环、y波导和探测器,所述y波导与所述光纤环连接。
13、作为优选的技术方案,所述的探测器包括依次连接的光信号检测差分放大电路和信号检测伺服电路,所述光信号检测差分放大电路包括依次连接的模数转换芯片、信号控制处理芯片、数模转换芯片和辅助闭环芯片。
14、作为优选的技术方案,所述的惯性测量单元包括一组独立的三轴微机械陀螺仪以及三轴微机械加速度计。
15、作为优选的技术方案,所述的主控模块包括无线通信芯片。
16、作为优选的技术方案,所述的台体与双轴光纤陀螺仪的接触部设置有锁定器,用于将所述双轴光纤陀螺仪锁定在所述预设位置处直至测量结束。
17、作为优选的技术方案,还包括设置在所述台体处的无接触式位置传感器,用于在接收到传感器信号后向所述锁定器发送动作信号。
18、本发明的另一个方面,提供了一种基于双轴光纤陀螺定向测姿方法,包括如下步骤:
19、包括如下步骤:
20、从惯性测量单元获得倾角数据并判断是否处在运动状态,若是,则向步进电机发送动作信号,控制与所述步进电机连接的双轴光纤陀螺仪分别在两个预设位置采集光纤陀螺数据;
21、基于所述光纤陀螺数据以及所述倾角数据,获取相对于北向的角度并发送到所述惯性测量单元,向所述双轴光纤陀螺仪发送关闭信号;
22、持续从所述惯性测量单元获取姿态数据,持续进行姿态测定。
23、本发明的另一个方面,提供了一种计算机可读存储介质,包括供电子设备的一个或多个处理器执行的一个或多个程序,所述一个或多个程序包括用于执行上述基于双轴光纤陀螺定向测姿方法的指令。
24、与现有技术相比,本发明具有以下优点:
25、(1)双轴光纤陀螺安装在一个可单周期旋转的台体上,该台体由电机驱动模块驱动,通过止动块将双轴光纤陀螺固定在两个预设的位置处,在测量过程中台体带动双轴光纤陀螺转动,在两个预设位置处采集数据进行定向,提高了转动效率,简化了转动机构,提高系统的便携性,同时保证了转动精度,从而解决或部分解决了现有的定向测姿系统中带动双轴光纤陀螺转动的结构较为复杂的问题。
26、(2)台体与双轴光纤陀螺仪的接触部设置有锁定器,同时台体上还设置有无接触式位置传感器,提供精确的校位信息,进一步提高了测量准确性,提高测量效率。
27、(3)在获取北向基准值后,从惯性测量单元获取姿态信息持续进行姿态测定,此时无需双轴光纤陀螺仪参与测姿,关闭光纤陀螺仪能够减少能源消耗,提高续航能力。
技术特征:
1.一种基于双轴光纤陀螺的定向测姿系统,其特征在于,包括:
2.根据权利要求1所述的一种基于双轴光纤陀螺的定向测姿系统,其特征在于,所述的双轴光纤陀螺仪包括:
3.根据权利要求2所述的一种基于双轴光纤陀螺的定向测姿系统,其特征在于,每个所述的检测子模块均包括光纤环、y波导和探测器,所述y波导与所述光纤环连接。
4.根据权利要求3所述的一种基于双轴光纤陀螺的定向测姿系统,其特征在于,所述的探测器包括依次连接的光信号检测差分放大电路和信号检测伺服电路,所述光信号检测差分放大电路包括依次连接的模数转换芯片、信号控制处理芯片、数模转换芯片和辅助闭环芯片。
5.根据权利要求1所述的一种基于双轴光纤陀螺的定向测姿系统,其特征在于,所述的惯性测量单元包括一组独立的三轴微机械陀螺仪以及三轴微机械加速度计。
6.根据权利要求1所述的一种基于双轴光纤陀螺的定向测姿系统,其特征在于,所述的主控模块包括无线通信芯片。
7.根据权利要求1所述的一种基于双轴光纤陀螺的定向测姿系统,其特征在于,所述的台体与双轴光纤陀螺仪的接触部设置有锁定器,用于将所述双轴光纤陀螺仪锁定在所述预设位置处直至测量结束。
8.根据权利要求7所述的一种基于双轴光纤陀螺的定向测姿系统,其特征在于,还包括设置在所述台体处的无接触式位置传感器,用于在接收到传感器信号后向所述锁定器发送动作信号。
9.一种基于双轴光纤陀螺定向测姿方法,其特征在于,包括如下步骤:
10.一种计算机可读存储介质,其特征在于,包括供电子设备的一个或多个处理器执行的一个或多个程序,所述一个或多个程序包括用于执行如权利要求9所述基于双轴光纤陀螺定向测姿方法的指令。
技术总结
本发明涉及一种基于双轴光纤陀螺的定向测姿系统,所述系统包括:步进电机,与电机驱动模块连接;双轴光纤陀螺仪,用于获取寻北定姿所需的原始数据,双轴光纤陀螺仪安装在步进电机的台体上,台体经电机带动可在180°范围内旋转,与外部固定结构接触部位设置有止动块,用于将台体机械限位于两个相隔180°的预设位置处;惯性测量单元,用于寻北过程中的倾角补偿参数获取,和系统寻北后的接续测量,便于系统持续获取姿态信息;主控模块,用于控制步进电机转动到预设位置并获取陀螺仪的输出数据,根据输出数据获取北向基准值,并基于姿态信息持续进行姿态测定。与现有技术相比,本发明具有转动效率高,转动机构简单,系统便携性高等优点。
技术研发人员:虞翔,施广飞,戚帅,孟凌宇
受保护的技术使用者:上海傲世控制科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!