一种锂电池传感器故障诊断方法
本发明涉及锂电池故障诊断,尤其涉及一种锂电池传感器故障诊断方法。
背景技术:
1、随着世界各国对环境保护的重视和石油资源的日渐减少,电动汽车逐渐替代燃油车是大势所趋。而电池作为电动汽车(ev)的核心组成部分,它的正常工作对电动汽车至关重要。但近年来,电动汽车事故仍然层出不穷,比较常见的事故是电动汽车电池自燃。因此,加强对电动汽车电池系统的监管,对电池的故障进行及时诊断非常重要。电池管理系统(bms)对与确保ev中的锂离子电池组的可靠安全运行必不可少。通常包含电池数据收集、充电状态(soc)估计、健康状态(soh)估计、电池平衡、充电控制等。这些bms功能的实现很大程度上依赖于通过电流、电压和温度传感器收集的数据。由于电动汽车的电池组中安装了数百个此类传感器,以监测每个电池单元的电流、电压和温度,因此单个电流或电压传感器发生故障的概率大大增加。传感器故障可能导致电池性能下降甚至严重的安全隐患。如果是电压传感器故障,实际电池电压可能会超过电池厂家规定的上下限电压限制,造成过充过放。反复过度充电或过度放电会导致电池容量急剧下降,甚至发生内部短路故障。电压或电流传感器的故障也会导致soc和soh的估计误差增加。因此,有必要提出一种传感器故障诊断方案来提高电池的安全性。liu,z.t.和h.w.he使用自适应扩展卡尔曼滤波对锂电池输出电压进行观测来诊断传感器故障。chen,w.等使用一组龙伯格观测器和学习观测器同时被用于锂电池传感器的故障检测与隔离。xiong,r.等通过使用递推最小二乘和无迹卡尔曼滤波结合的方法估计锂电池soc,并将实际soc值与估计soc值之间的差定义为残差,以检测电压和电流传感器的故障,但现有方法多单一使用卡尔曼滤波法对soc进行估计,此方法对建模精度要求较高,而高精度的模型构建复杂,在模型准确度不够时,算法精度会收到较大影响;使用滑模观测器可以较好地解决系统扰动带来的影响,在精度不高的模型中效果更理想。但其离散的开关特性又容易导致系统的抖振现象,从而影响soc的估计精度,进一步影响诊断算法的精度。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种锂电池传感器故障诊断方法,以解决现有方法精确度不足的问题。
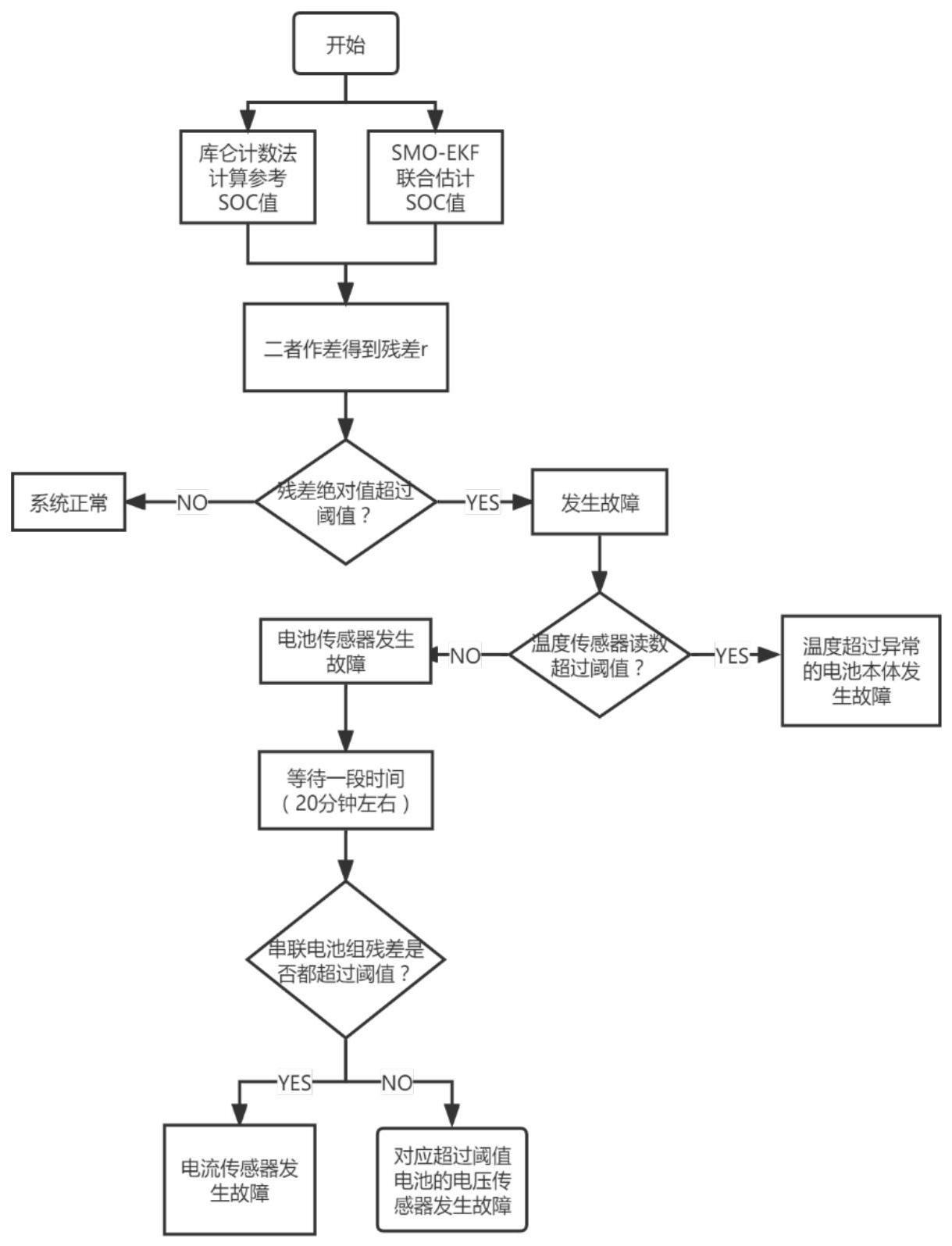
2、基于上述目的,本发明提供了一种锂电池传感器故障诊断方法,包括以下步骤:
3、通过库伦计数法得到参考soc;
4、使用smo-ekf联合估计方法得到估计soc;
5、将参考soc和估计soc作差得到残差,判断残差绝对值是否超过设定阈值;
6、若残差绝对值超过设定阈值,则获取锂电池温度,判断锂电池温度是否超过阈值;
7、若锂电池温度超过阈值,则输出判断结果为锂电池本体发生故障,若锂电池温度不超过阈值,则在设定时间后,判断串联电池组中其他电池的残差是否都超过阈值;
8、若是则判断为电流传感器发生故障,若否则判断为对应超过阈值电池的电压传感器发生故障。
9、优选地,通过库伦计数法得到参考soc的计算公式为:
10、
11、其中,下标k表示第k次采样,δt为采样间隔,il,k表示当前时刻的等效电路电流,ηi为库仑效率,表示当前时刻的参考soc,表示前一时刻的参考soc,表示初始soc。
12、优选地,初始soc的选取方法包括:
13、若电池停止充电或放电超过m小时,电池的端电压ut约等于电池的开路电压uoc,则通过uoc和soc之间的函数关系来矫正初始soc;
14、若电池停止充电或放电小于m小时,电池的电动势不稳定,则将电池停止工作时的soc值选取为初始soc。
15、优选地,使用smo-ekf联合估计方法得到估计soc包括:
16、构建滑模观测器,滑模观测器设计形式为
17、
18、其中,为状态变量的估计值,u(k)为系统输入,为系统输出的估计值,a(k)为系统矩阵,b(k)为输入矩阵,c(k)为观测矩阵,d(k)为前馈矩阵,l为观测器的增益矩阵,m为饱和函数增益;为边界层,sat(.)为饱和函数,表达式为
19、
20、其中,sgn(.)为符号函数;
21、选取合适的参数l、m和使得成立,其中,在边界层外,所设计的滑模观测器满足滑动模态,且状态估计误差逐渐接近在边界层内,所设计的滑模观测器稳定,且在k→∞时,状态估计误差有界;
22、使用设计的滑模观测器观测出状态其中包括代表滑模观测器对soc(k+1)的观测值;
23、将滑模观测器的观测状态作为扩展卡尔曼滤波器的先验估计值带入扩展卡尔曼滤波公式中进行迭代,完成后验估计,得到当前时刻的估计soc,即
24、优选地,后验估计包括:
25、误差协方差矩阵时间更新:其中ak-1为k-1时刻的系统矩阵a(k-1),其转置为pk-1|k-1为上一个时刻的误差协方差矩阵,qk-1为k-1时刻的过程噪声协方差矩阵。
26、卡尔曼增益矩阵计算:其中k为卡尔曼增益矩阵,rk是高斯白噪音的方差,ck是k时刻的观测矩阵c(k),pk|k-1为误差协方差矩阵的先验估计值;
27、状态后验估计更新:其中为扩展卡尔曼滤波器的后验估计值,yk为原系统输出值;
28、误差协方差矩阵测量更新:pk|k=(in-kkck)pk|k-1,其中pk|k为误差协方差矩阵的后验估计值,pk|k-1为误差协方差矩阵的先验估计值,in为单位矩阵。
29、优选地,温度的阈值设置为当前环境温度+10℃。
30、优选地,传感器的噪声为高斯白噪声。
31、优选地,获取锂电池温度包括读取锂电池的温度传感器的数据。
32、优选地,设定时间为20分钟。
33、本发明的有益效果:smo(滑模观测器)是一种计算量小、鲁棒性好的非线性观测器,在一定程度上解决了系统参数变化,扰动带来的影响,但是容易导致系统发生抖振,本方法将ekf(扩展卡尔曼滤波)和smo结合的估算方法可以兼顾二者优势,实现锂电池soc的高精度估算,从而减小传感器非故障条件下的残差,降低故障误报率。
技术特征:
1.一种锂电池传感器故障诊断方法,其特征在于,包括:
2.根据权利要求1所述的锂电池传感器故障诊断方法,其特征在于,所述通过库伦计数法得到参考soc的计算公式为:
3.根据权利要求2所述的锂电池传感器故障诊断方法,其特征在于,初始soc的选取方法包括:
4.根据权利要求1所述的锂电池传感器故障诊断方法,其特征在于,所述使用smo-ekf联合估计方法得到估计soc包括:
5.根据权利要求4所述的锂电池传感器故障诊断方法,其特征于,所述后验估计包括:
6.根据权利要求1所述的锂电池传感器故障诊断方法,其特征在于,温度的阈值设置为当前环境温度+10℃。
7.根据权利要求1所述的锂电池传感器故障诊断方法,其特征在于,传感器的噪声为高斯白噪声。
8.根据权利要求1所述的锂电池传感器故障诊断方法,其特征在于,所述获取锂电池温度包括读取锂电池的温度传感器的数据。
9.根据权利要求1所述的锂电池传感器故障诊断方法,其特征在于,所述设定时间为20分钟。
技术总结
本发明涉及锂电池故障诊断技术领域,尤其涉及一种锂电池传感器故障诊断方法,通过库伦计数法得到参考SOC,使用SMO‑EKF联合估计方法得到估计SOC,计算二者的残差绝对值是否超过阈值,并进一步判断电池本体温度是否正常,再根据串联电池组残差情况判断锂电池传感器故障发生部位,本方法将EKF和SMO结合的估算方法可以兼顾二者优势,实现锂电池SOC的高精度估算,从而减小传感器非故障条件下的残差,降低故障误报率。
技术研发人员:殷海双,兰天宇,高志伟,王永安,刘庆强,刘远红
受保护的技术使用者:东北石油大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!