一种果园采摘车的自动导航方法与流程
本发明涉及一种导航方法,尤其是一种果园采摘车的自动导航方法。
背景技术:
1、现有的果园采摘时,多是人工驾驶车辆手机采摘的果实,这种方法不适用自动采摘的方式,为了实现自动采摘,需要采摘车辆能够自动进行导航,因此如何实现采摘车的自动导航是亟待解决的问题。
技术实现思路
1、为解决上述问题,本发明提供一种能够自动对采摘车进行导航,并且控制方法简单的一种果园采摘车的自动导航方法,具体技术方案为:
2、一种果园采摘车的自动导航方法,包括以下步骤:在导航目标点与当前点之间设置第一次转动目标,将目的点设为第二次转动目标,先将果园采摘车导航至第一次转动目标,然后在所述第一次转动目标处导航至第二次转动目标,且所述果园采摘车进行减速行驶。
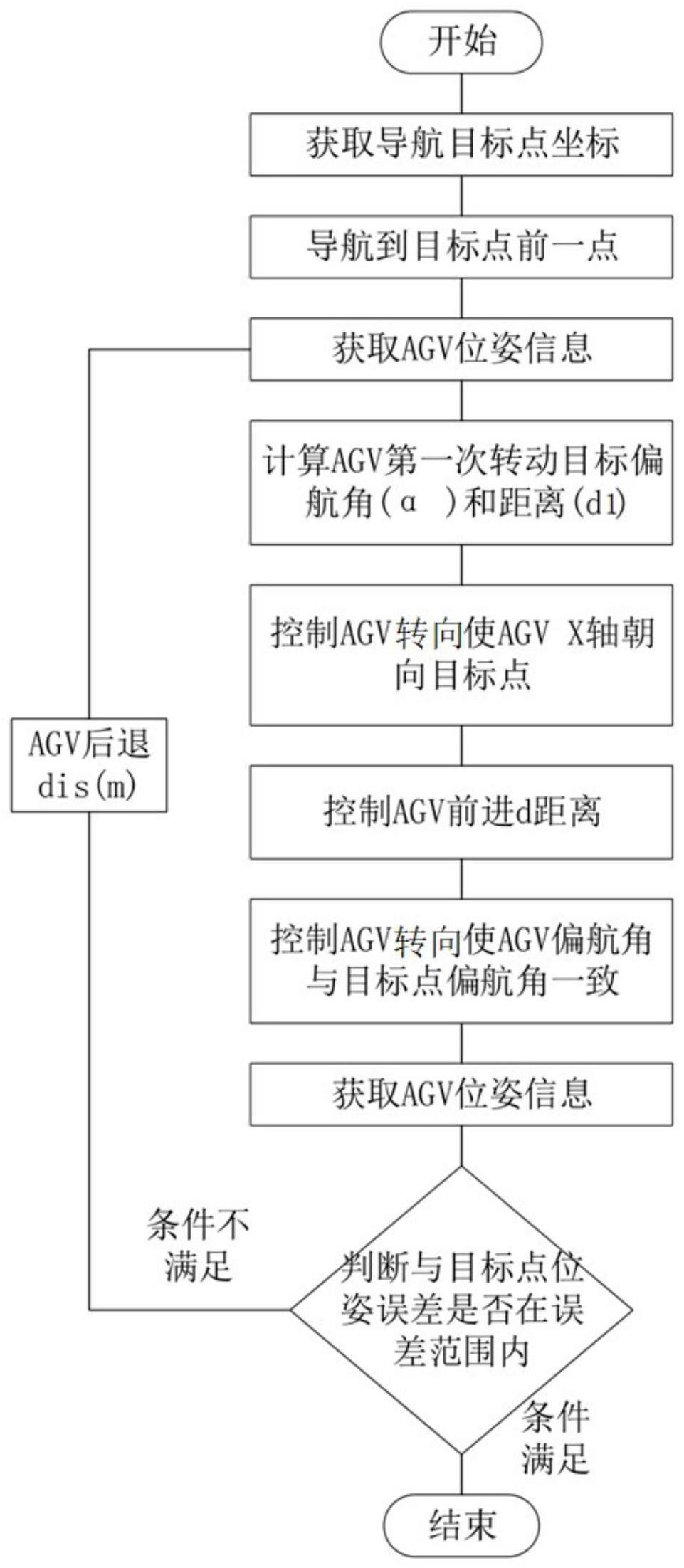
3、优选的,所述果园采摘车导航至所述第一次转动目标时,包括以下步骤:
4、s11、获取导航目标点的坐标;
5、s12、导航到目标点前一点;
6、s13、获取果园采摘车的当前的位姿信息;
7、s14、计算果园采摘车第一次转动的目标点偏航角和目标点距离;
8、s15、根据目标点偏航角控制果园采摘车转向,使果园采摘车朝向目标点;
9、s16、根据目标点距离控制果园采摘车的前进距离;
10、s17、所述果园采摘车前进过程中控制果园采摘车的方向,使所述果园采摘车的偏航角与目标点偏航角一致;
11、s18、获取果园采摘车的位姿信息;
12、s19、判断目标点位姿误差是否在误差范围内,若在误差范围内则停止在目标点,否则果园采摘车后退至设定距离,并返回至步骤s13。
13、优选的,所述第一次转动目标处导航至第二次转动目标时,包括偏航角控制和速度控制。
14、进一步的,所述偏航角控制时,包括以下步骤:
15、s21、获取果园采摘车目标点偏航角;
16、s22、获取果园采摘车当前点偏航角;
17、s23、计算当前果园采摘车偏航角与目标点偏航角的角度差;
18、s24、控制果园采摘车的转动角度,并且转动角度随差值减小而减小;
19、s25、判断当前果园采摘车偏航角与目的编偏航角的角度差是否在误差范围内,若在误差范围内则停止行驶,否则返回s21。
20、进一步的,所述速度控制时,包括以下步骤:
21、s31、获取果园采摘车前进距离;
22、s32、获取odom数据,对odom速度数据做积分处理;
23、s33、果园采摘车前进距离值减odom积分值作为差值v;
24、s34、控制果园采摘车移动,并且移动速度随着差值v减小而减小;
25、s35、判断差值是否在误差范围内,若在误差范围内则停止移动,若不在误差范围内则返还s32。
26、与现有技术相比本发明具有以下有益效果:
27、本发明提供的一种果园采摘车的自动导航方法将导航的路程分解为两个转动目标,从而简化了控制方法,通过多次检测偏航角度提高了控制的精度,同时便于实现减速,实现了果园采摘车的自动导航,并且使移动的速度平稳,能够有效实现果园复杂的路况。
技术特征:
1.一种果园采摘车的自动导航方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种果园采摘车的自动导航方法,其特征在于,
3.根据权利要求1所述的一种果园采摘车的自动导航方法,其特征在于,
4.根据权利要求3所述的一种果园采摘车的自动导航方法,其特征在于,
5.根据权利要求3所述的一种果园采摘车的自动导航方法,其特征在于,
技术总结
本发明涉及一种果园采摘车的自动导航方法,包括以下步骤:在导航目标点与当前点之间设置第一次转动目标,将目的点设为第二次转动目标,先将果园采摘车导航至第一次转动目标,然后在所述第一次转动目标处导航至第二次转动目标,且所述果园采摘车进行减速行驶。本发明提供的一种果园采摘车的自动导航方法将导航的路程分解为两个转动目标,从而简化了控制方法,通过多次检测偏航角度提高了控制的精度,同时便于实现减速,实现了果园采摘车的自动导航,并且使移动的速度平稳,能够有效实现果园复杂的路况。
技术研发人员:周宁宁,陆春元,许辉,李冰
受保护的技术使用者:江苏汇博机器人技术股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!