磁粉探伤机构及磁粉探伤机器人的制作方法
本发明涉及无损探伤,尤其是涉及一种磁粉探伤机构及磁粉探伤机器人。
背景技术:
1、目前,大型桥梁结构、风电管桩、压力容器罐体、石油管道等大型钢结构件均具有结构尺寸大、焊缝多、工作环境复杂、结构安全性要求高等特点,这些设备在制造及服役过程中需要频繁检测,以保证设备安全可靠运行。目前,设备定期检测均由人工操作无损探伤设备完成,由于这些设备结构尺寸大、结构多为曲面,检测前需要耗费大量时间搭建脚手架等辅助设施,人工检测均为高空作业,人工操作存在作业周期长、费用高等问题,同时,受工作条件和环境限制,人工检测面临检测人员劳动强度大、检测效率低、危险性高等问题。因此,开发研制出满足于上述环境的大型钢结构件现场条件的自动检测系统代替人工检测,具有十分重要的现实意义。
2、目前,针对大型曲面钢结构件无损检测机器人设计,主要是采用磁吸附的爬壁机器人形式。针对目前标准要求大型钢结构件表面缺陷定期检测要求,无损检测主要采用磁粉探伤方法。公开号为cn112478011a的中国发明专利公开了一种具备磁粉探伤功能爬壁机器人,结构包括底板,设在底板的驱动组件和磁粉探伤组件,机器人通过驱动组件获得壁面吸附与车体运动功能,通过磁粉探伤组件完成对壁面的缺陷检测功能。机器人具有状态a和状态b,状态a:此时机器人检测磁场处于第一状态,两侧探伤磁极相对壁面的磁极分别为n、s,检测壁面与两侧探伤磁极之间就形成了磁路闭合,磁粉在该区域会随着磁场分布状态分布,平行于该磁场方向的缺陷会被显示出来,但垂直于该磁场方向的缺陷无法被检测,所以对两侧胶轮做差速控制做转向运动形成状态b。状态b:两侧探伤磁极和检测壁面之间的磁场分布方向与状态a分布方向垂直,完成对所有方向上的缺陷检测,提供缺陷检测精确度。上述专利中的具备磁粉探伤功能爬壁机器人存在如下缺陷:第一,通过对两侧胶轮做差速控制做转向运动进而改变探伤角度,由于机器人转向运动时并不是以探伤磁极为中心进行旋转,会导致探伤位置发生改变,无法精确实现探伤,第二,由于探伤磁极是安装在机器人底部的,在不平坦的待探伤位置上进行探伤时,容易导致探伤磁极与待探伤位置的凸起部分相撞,损坏探伤磁极和待探伤位置。
技术实现思路
1、为此,本发明所要解决的技术问题在于解决现有技术中难以实现精确探伤和和探伤磁极与待探伤位置容易相撞的问题。
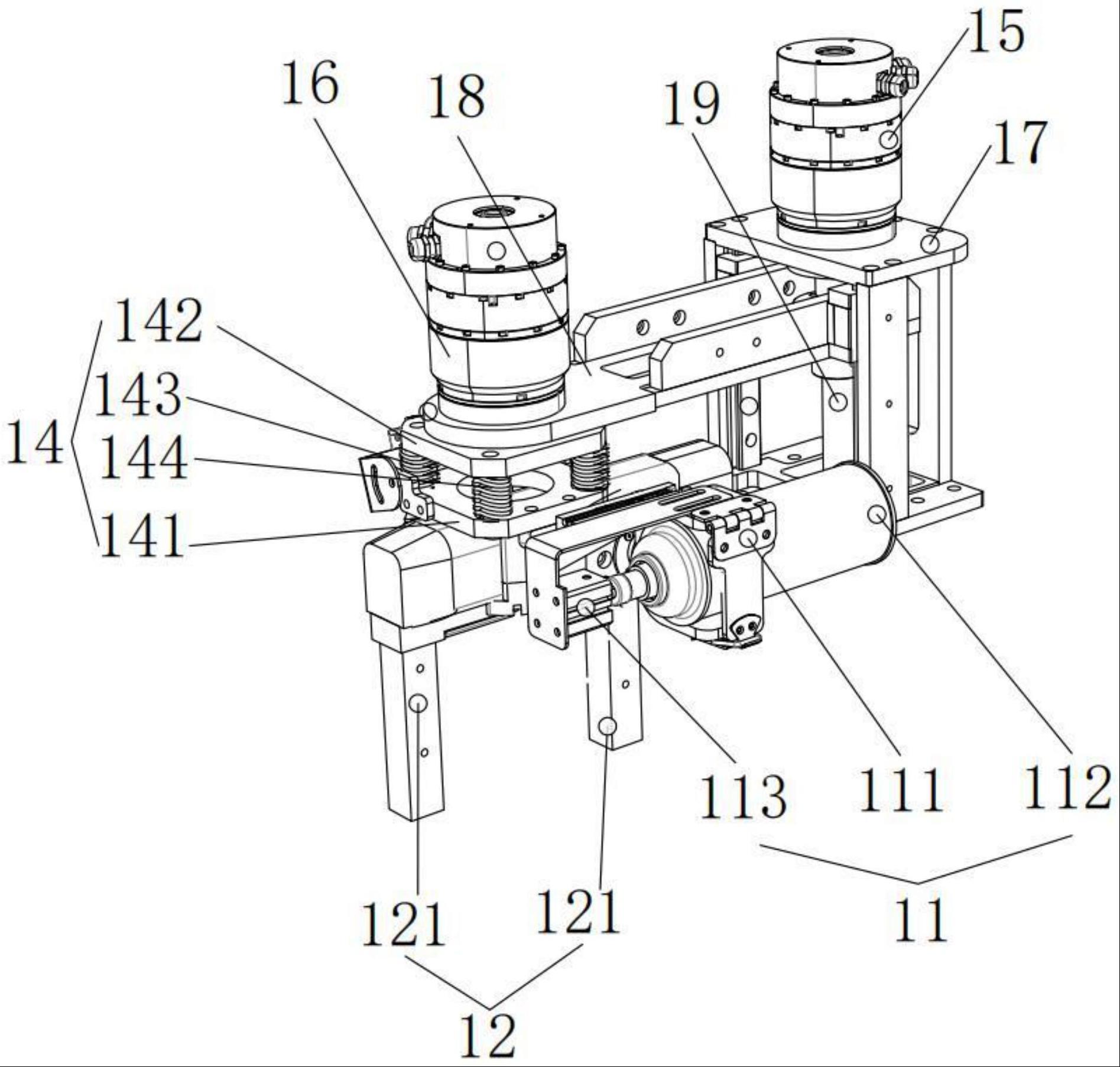
2、为解决上述技术问题,本发明提供了一种磁粉探伤机构,包括用于将磁液喷射到待探伤位置上的喷磁装置、用于对待探伤位置上的磁液进行磁化的磁化装置以及用于对待探伤位置上的磁化后磁液进行拍照取样的图像采集装置,所述磁化装置安装于检测安装座上,所述磁化装置包括平行设置的两磁极,还包括用于带动所述磁化装置升降的升降调节驱动装置和用于带动所述磁化装置旋转的旋转调节驱动装置,所述升降调节驱动装置安装于升降调节安装座上,所述旋转调节驱动装置安装于旋转调节安装座上,所述磁化装置的升降方向与所述磁极的长度方向平行,所述磁化装置的旋转轴线与所述磁极的长度方向平行,且所述磁化装置的旋转轴线与所述两磁极的磁极连线的中点垂直相交。
3、在本发明的一个实施例中,所述升降调节驱动装置为升降电机,所述升降电机的转动部通过丝杆螺母组件连接所述旋转调节安装座,所述旋转调节驱动装置为旋转电机,所述旋转电机的转动部连接所述检测安装座。
4、在本发明的一个实施例中,所述喷磁装置通过合页被卡箍连接于所述检测安装座上。
5、在本发明的一个实施例中,所述喷磁装置包括用于存放磁粉液的磁粉液筒和用于驱动所述磁粉液筒中的磁粉液喷出的微型气缸。
6、在本发明的一个实施例中,所述图像采集装置通过相机支架连接在所述检测安装座上。
7、在本发明的一个实施例中,所述检测安装座包括第一安装板、第二安装板、连接柱以及恒力弹簧,所述第一安装板与所述第二安装板平行布置并且不可脱离的滑动连接所述连接柱,所述恒力弹簧套设于所述连接柱上并且弹性支撑于所述第一安装板和所述第二安装板之间,所述磁化装置连接所述第一安装板,所述第二安装板连接所述旋转调节驱动装置的动力输出端。
8、本发明还提供另外一个技术方案:一种磁粉探伤机器人,包括机器人和所述的磁粉探伤机构,所述磁粉探伤机构安装于所述机器人上。
9、在本发明的一个实施例中,所述机器人为磁吸式爬壁机器人,所述磁吸式爬壁机器人包括车架、前车轮、后车轮、视觉检测装置、光源、磁吸附装置以及被动适应模块,所述前车轮和后车轮安装在所述车架的底部,所述视觉检测装置用于检测待探伤位置上焊缝的位置,所述光源用于为所述视觉检测装置和所述图像采集装置补光,所述磁吸附装置为间隙吸附装置,所述磁吸附装置安装于所述车架的底部,所述被动适应模块允许所述前车轮与所述后车轮相对旋转一定角度。
10、在本发明的一个实施例中,所述磁粉探伤机构可拆卸式连接于所述车架上,所述磁粉探伤机构可切换位置的连接于所述机器人行走方向的前方或侧方。
11、在本发明的一个实施例中,还包括用于遥控所述磁吸式爬壁机器人的操作手柄,所述操作手柄包括:
12、电源开关,所述电源开关用于启停所述操作手柄;
13、有线接口,所述有线接口用于实现所述操作手柄与所述机器人的有线连接;
14、急停开关,所述急停开关用于在紧急状况下停止机器人所有动作;
15、行走方向控制摇杆,所述行走方向控制摇杆用于控制所述机器人的行走方向;
16、行走速度控制按钮,所述行走速度控制按钮用于控制所述机器人的行走速度;
17、升降控制按钮,所述升降控制按钮用于控制所述升降调节驱动装置;
18、旋转控制按钮,所述旋转控制按钮用于控制所述旋转调节驱动装置;
19、喷磁按钮,所述喷磁按钮用于控制所述喷磁装置喷出磁液;
20、拍照按钮,所述拍照按钮用于控制所述图像采集装置进行拍照记录;
21、照明按钮,所述照明按钮按用于控制所述光源;
22、模式切换按钮,所述模式切换按钮用于供操作者选择自动模式和手动模式,自动模式下,所述磁粉探伤机器人根据所述视觉检测装置的反馈和运算使所述机器人沿固定焊缝保持直线行走,手动模式下,通过操作人员控制所述机器人的行走;
23、显示器,所述显示器用于显示所述磁粉探伤机器人的行走速度、磁化装置的升降高度、磁化装置的旋转角度以及磁粉探伤检测区域的画面。
24、本发明的上述技术方案相比现有技术具有以下优点:
25、本发明所述的磁粉探伤机构及磁粉探伤机器人,通过设置升降调节驱动装置,可以调节磁化装置的高度,进而根据待探伤位置的表面形状适应性调节磁化装置的高度,防止磁化装置与待探伤位置相撞,通过设置旋转调节驱动装置,可以调节磁化装置的探伤角度,进而完成对所有方向上的检测,且磁化装置调节探伤角度后探伤位置不会发生变化。
技术特征:
1.一种磁粉探伤机构,包括用于将磁液喷射到待探伤位置上的喷磁装置、用于对待探伤位置上的磁液进行磁化的磁化装置以及用于对待探伤位置上的磁化后磁液进行拍照取样的图像采集装置,所述磁化装置安装于检测安装座上,所述磁化装置包括平行设置的两磁极,其特征在于,还包括用于带动所述磁化装置升降的升降调节驱动装置和用于带动所述磁化装置旋转的旋转调节驱动装置,所述升降调节驱动装置安装于升降调节安装座上,所述旋转调节驱动装置安装于旋转调节安装座上,所述磁化装置的升降方向与所述磁极的长度方向平行,所述磁化装置的旋转轴线与所述磁极的长度方向平行,且所述磁化装置的旋转轴线与所述两磁极的磁极连线的中点垂直相交。
2.根据权利要求1所述的磁粉探伤机构,其特征在于,所述升降调节驱动装置为升降电机,所述升降电机的转动部通过丝杆螺母组件连接所述旋转调节安装座,所述旋转调节驱动装置为旋转电机,所述旋转电机的转动部连接所述检测安装座。
3.根据权利要求1所述的磁粉探伤机构,其特征在于,所述喷磁装置通过合页被卡箍连接于所述检测安装座上。
4.根据权利要求1所述磁粉探伤机构,其特征在于,所述喷磁装置包括用于存放磁粉液的磁粉液筒和用于驱动所述磁粉液筒中的磁粉液喷出的微型气缸。
5.根据权利要求1所述的磁粉探伤机构,其特征在于,所述图像采集装置通过相机支架连接在所述检测安装座上。
6.根据权利要求1所述的磁粉探伤机构,其特征在于,所述检测安装座包括第一安装板、第二安装板、连接柱以及恒力弹簧,所述第一安装板与所述第二安装板平行布置并且不可脱离的滑动连接所述连接柱,所述恒力弹簧套设于所述连接柱上并且弹性支撑于所述第一安装板和所述第二安装板之间,所述磁化装置连接所述第一安装板,所述第二安装板连接所述旋转调节驱动装置的动力输出端。
7.一种磁粉探伤机器人,其特征在于,包括机器人和如权利要求1至6任一所述的磁粉探伤机构,所述磁粉探伤机构安装于所述机器人上。
8.根据权利要求7所述的磁粉探伤机器人,其特征在于,所述机器人为磁吸式爬壁机器人,所述磁吸式爬壁机器人包括车架、前车轮、后车轮、视觉检测装置、光源、磁吸附装置以及被动适应模块,所述前车轮和后车轮安装在所述车架的底部,所述视觉检测装置用于检测待探伤位置上焊缝的位置,所述光源用于为所述视觉检测装置和所述图像采集装置补光,所述磁吸附装置为间隙吸附装置,所述磁吸附装置安装于所述车架的底部,所述被动适应模块允许所述前车轮与所述后车轮相对旋转一定角度。
9.根据权利要求8所述的磁粉探伤机器人,其特征在于,所述磁粉探伤机构可拆卸式连接于所述车架上,所述磁粉探伤机构可切换位置的连接于所述机器人行走方向的前方或侧方。
10.根据权利要求8所述的磁粉探伤机器人,其特征在于,还包括用于遥控所述磁吸式爬壁机器人的操作手柄,所述操作手柄包括:
技术总结
本发明涉及一种磁粉探伤机构及磁粉探伤机器人,包括喷磁装置、磁化装置以及图像采集装置,还包括用于带动磁化装置升降的升降调节驱动装置和用于带动磁化装置旋转的旋转调节驱动装置,升降调节驱动装置安装于升降调节安装座上,旋转调节驱动装置安装于旋转调节安装座上,磁化装置的升降方向与磁极的长度方向平行,磁化装置的旋转轴线与磁极的长度方向平行,且磁化装置的旋转轴线与两磁极的磁极连线的中点垂直相交。本发明可以调节磁化装置的高度和探伤角度,根据待探伤位置的表面形状适应性调节磁化装置的高度,防止磁化装置与待探伤位置相撞,完成对所有方向上的检测,且磁化装置调节探伤角度后探伤位置不会发生变化。
技术研发人员:张华军,蔡春波,孙磊
受保护的技术使用者:上海赛威德机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!