一种多通道壁厚检测机器人的制作方法
本发明涉及一种通道壁厚检测机器人。特别是涉及一种具有焊缝越障能力和多管道壁厚同时检测的多通道壁厚检测机器人。
背景技术:
1、过程工业、机械工业等行业存在大量金属壁面,比如管壁、罐壁、船体壁等,在使用过程中,由于磨损、腐蚀、冲刷等原因,壁厚逐渐减薄,为了防止因壁厚过薄而产生泄露、变形等问题,需要定期进行检测维护。目前通常是通过人工手持测厚仪进行检测,存在劳动强度大、效率低、易出现漏检等问题,对于尺寸较大,特别是悬空壁面,人工作业难度大、危险性高。利用壁厚检测机器人来代替人工成为了近年来的一个研究热点。
2、目前市场上出现了几款壁厚检测机器人,但由于为单探头结构,检测效率未能达到理想高度。
3、设计一种多通道壁厚检测机器人来代替人工,机器人携带多个探头同时工作,连续检测,壁厚数据远程传输并记录到终端,能够大大提高检测效率和安全性。
技术实现思路
1、本发明所要解决的技术问题是,为克服现有技术的不足,提供一种能够实现在凹凸不平的管壁上实现壁厚的自动化、高效率和高精度检测的多通道壁厚检测机器人。
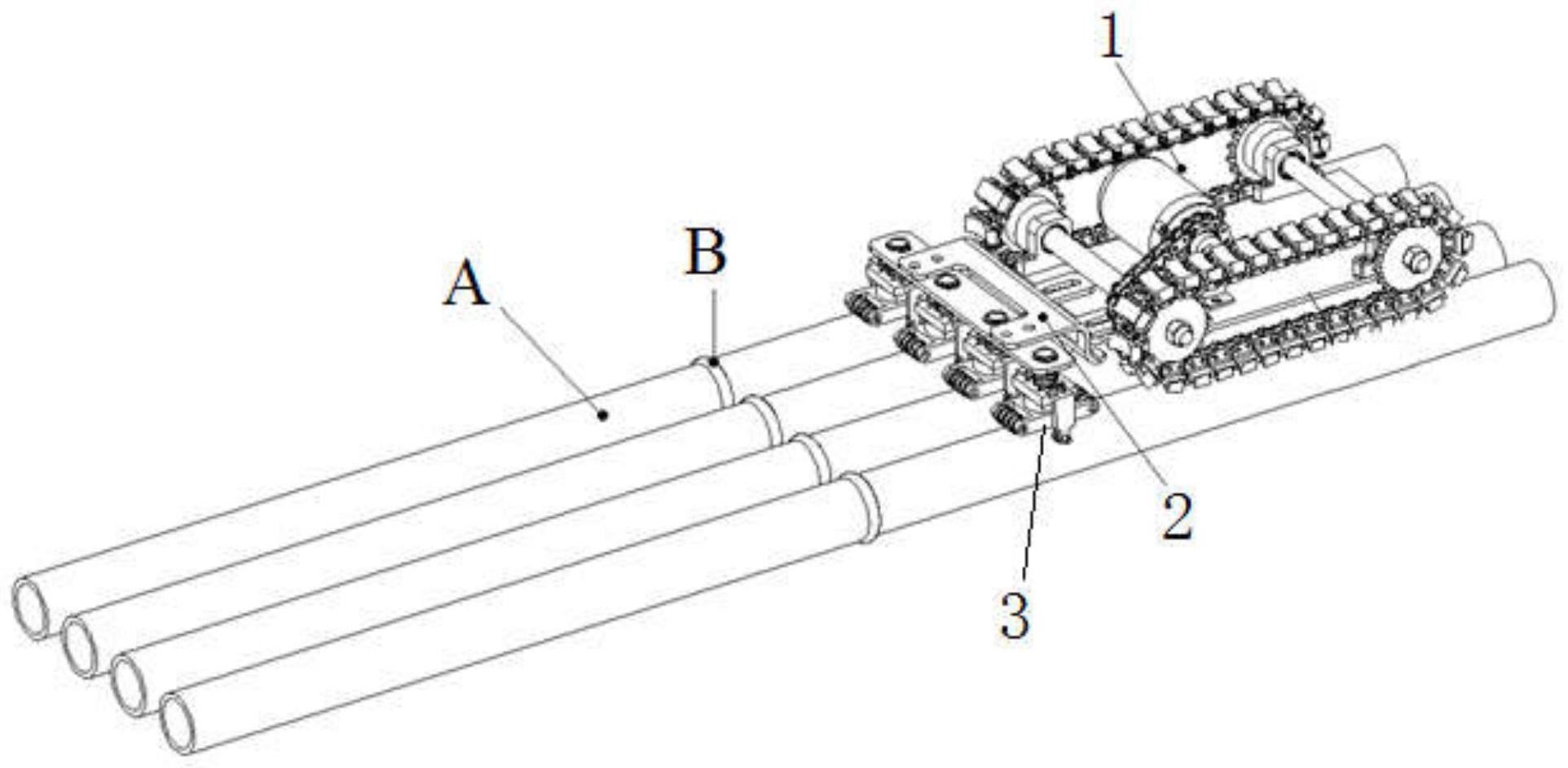
2、本发明所采用的技术方案是:一种多通道壁厚检测机器人,包括有磁性驱动装置和多模块柔性测量装置,所述的磁性驱动装置能够沿并排设置的2个以上的管道轴向运动,所述的多模块柔性测量装置通过一个连接组件与所述的磁性驱动装置相连接,并在磁性驱动装置的驱动下沿2个以上的管道的轴向同时对2个以上的管道的壁厚进行检测,所述的多模块柔性测量装置是由2个以上的柔性测量模块构成,所述2个以上的柔性测量模块结构相同,均是由与所述的连接组件活动连接并能够上下弹性运动的越障移动支架和连接在所述越障移动支架下的超声波壁厚检测探头构成。
3、所述的磁性驱动装置包括有底板、电机和两组能够能够沿2个以上的管道的轴向运动的链条式履带,所述底板通过所述的连接组件与所述多模块柔性测量装置的2个以上的柔性测量模块结构中的越障移动支架相连,所述的电机通过电机架设置在所述底板上,所述电机的输出轴贯穿所述的电机架固定连接一个主动链轮,所述主动链轮又依次通过相啮合的链条、与所述链条相啮合的从动链轮连接位于所述电机前侧的前传动轴,所述的从动链轮与所述的前传动轴为固定连接,所述前传动轴的两端分别贯穿对称设置在所述底板上的两个前轴承座后各连接一个履带前链轮,所述底板上位于电机后侧对称设置有两个后轴承座,后传动轴的两端分别贯穿所述的两个后传动轴后各连接一个履带后链轮,所述的两个履带前链轮和两个履带后链轮对应的通过链条式履带相连接,所述的链条式履带中的每个齿上都固定设置有一个吸附在所述管道上的弧形磁块,用于防止磁性驱动装置从管道脱落。
4、2个以上的所述柔性测量装置中的越障移动支架结构相同,均包括有连接座,所述连接座的上端面中部一体形成有垂直的缓冲柱,所述缓冲柱的外周套有弹簧,所述缓冲柱的顶端径向形成有一圈凹槽,所述缓冲柱能够上下移动的贯穿于形成在横板上的贯通孔,并通过卡在所述缓冲柱顶端上的凹槽内的限位卡簧搭所述的横板上,防止缓冲柱从上横板的贯通孔中脱落,所述连接座的两侧分别通过螺栓相对称地固定连接有越障支架,两个所述越障支架的下端各连接有越障轮,超声波壁厚检测探头固定连接在所述连接座的下底面上。
5、本发明的一种多通道壁厚检测机器人,在一台机器人上搭载多个壁厚检测探头,检测面积大,提高检测效率,且探头的安装采用柔性结构,能够在凹凸不平的壁面工作,以实现壁厚探头套装的越障和的上下浮动。本发明适应性强,且整体结构易于实现、方便操作、效率高、安全性高、检测成本低,是一种具有较高创新性的壁厚检测机器人。
技术特征:
1.一种多通道壁厚检测机器人,包括有磁性驱动装置(1)和多模块柔性测量装置(3),其特征在于,所述的磁性驱动装置(1)能够沿并排设置的2个以上的管道(a)轴向运动,所述的多模块柔性测量装置(3)通过一个连接组件(2)与所述的磁性驱动装置(1)相连接,并在磁性驱动装置(1)的驱动下沿2个以上的管道(a)的轴向同时对2个以上的管道(a)的壁厚进行检测,所述的多模块柔性测量装置(3)是由2个以上的柔性测量模块构成,所述2个以上的柔性测量模块结构相同,均是由与所述的连接组件(2)活动连接并能够上下弹性运动的越障移动支架(3.1)和连接在所述越障移动支架(3.1)下的超声波壁厚检测探头(3.2)构成。
2.根据权利要求1所述的一种多通道壁厚检测机器人,其特征在于,所述的磁性驱动装置(1)包括有底板(1.1)、电机(1.3)和两组能够能够沿2个以上的管道(a)的轴向运动的链条式履带(1.10),所述底板(1.1)通过所述的连接组件(2)与所述多模块柔性测量装置(3)的2个以上的柔性测量模块结构中的越障移动支架(3.1)相连,所述的电机(1.3)通过电机架(1.2)设置在所述底板(1.1)上,所述电机(1.3)的输出轴贯穿所述的电机架(1.2)固定连接一个主动链轮(1.4),所述主动链轮(1.4)又依次通过相啮合的链条(1.5)、与所述链条(1.5)相啮合的从动链轮(1.8)连接位于所述电机(1.3)前侧的前传动轴(1.7),所述的从动链轮(1.8)与所述的前传动轴(1.7)为固定连接,所述前传动轴(1.7)的两端分别贯穿对称设置在所述底板(1.1)上的两个前轴承座(1.6)后各连接一个履带前链轮(1.9),所述底板(1.1)上位于电机(1.3)后侧对称设置有两个后轴承座(1.11),后传动轴(1.12)的两端分别贯穿所述的两个后传动轴(1.12)后各连接一个履带后链轮(1.13),所述的两个履带前链轮(1.9)和两个履带后链轮(1.13)对应的通过链条式履带(1.10)相连接,所述的链条式履带(1.10)中的每个齿上都固定设置有一个吸附在所述管道(a)上的弧形磁块(1.14),用于防止磁性驱动装置(1)从管道(a)脱落。
3.根据权利要求1所述的一种多通道壁厚检测机器人,其特征在于,所述的连接组件(2)包括有用于与所述多模块柔性测量装置(3)的2个以上的柔性测量模块结构中的越障移动支架(3.1)相连的横板(2.1),固定连接在所述横板(2.1)位于磁性驱动装置(1)一侧的中间连接板(2.2),所述中间连接板(2.2)在位于磁性驱动装置(1)一侧设置有用于与磁性驱动装置(1)中的底板(1.1)固定连接的连接凸板(2.3),所述的横板(2.1)上对应每一个柔性测量模块结构中的越障移动支架(3.1)都对应形成有与所述的越障移动支架(3.1)相连的贯通孔(2.4)。
4.根据权利要求3所述的一种多通道壁厚检测机器人,其特征在于,所述连接凸板(2.3)上形成有用于通过螺栓与所述的底板(1.1)固定连接的安装孔(2.5),所述安装孔(2.5)为能够调节多模块柔性测量装置(3)与磁性驱动装置(1)之间距离的椭圆形结构。
5.根据权利要求1所述的一种多通道壁厚检测机器人,其特征在于,2个以上的所述柔性测量装置(3)中的越障移动支架(3.1)结构相同,均包括有连接座(3.1.1),所述连接座(3.1.1)的上端面中部一体形成有垂直的缓冲柱(3.1.2),所述缓冲柱(3.1.2)的外周套有弹簧(3.1.3),所述缓冲柱(3.1.2)的顶端径向形成有一圈凹槽,所述缓冲柱(3.1.2)能够上下移动的贯穿于形成在横板(2.1)上的贯通孔(2.4),并通过卡在所述缓冲柱(3.1.2)顶端上的凹槽内的限位卡簧(3.1.4)搭所述的横板(2.1)上上,防止缓冲柱(3.1.2)从上横板(2.1)的贯通孔(2.4)中脱落,所述连接座(3.1.1)的两侧分别通过螺栓相对称地固定连接有越障支架(3.1.5),两个所述越障支架(3.1.5)的下端各连接有越障轮(3.1.6),超声波壁厚检测探头(3.2)固定连接在所述连接座(3.1.1)的下底面上。
6.根据权利要求5所述的一种多通道壁厚检测机器人,其特征在于,所述的越障支架(3.1.5)为l形结构,所述l形结构的水平部分形成有用于调整两个越障支架(3.1.5)之间间距的椭圆形通孔(3.1.5a),所述l形结构的水平部分通过贯穿所述的椭圆形通孔(3.1.5a)的螺栓(3.1.5b)与所述的连接座(3.1.1)固定连接,所述l形结构的的垂直部分的下部内侧连接所述的越障轮(3.1.6),所述超声波壁厚检测探头(3.2)位于两个所述的越障轮(3.1.6)之间。
技术总结
一种多通道壁厚检测机器人,包括有磁性驱动装置和多模块柔性测量装置,磁性驱动装置能够沿并排设置的2个以上的管道轴向运动,多模块柔性测量装置通过一个连接组件与磁性驱动装置相连接,并在磁性驱动装置的驱动下沿2个以上的管道的轴向同时对2个以上的管道的壁厚进行检测,多模块柔性测量装置是由2个以上的柔性测量模块构成,2个以上的柔性测量模块结构相同,均是由与连接组件活动连接并能够上下弹性运动的越障移动支架和连接在越障移动支架下的超声波壁厚检测探头构成。本发明检测面积大,能够在凹凸不平的壁面工作,以实现壁厚探头套装的越障和的上下浮动。本发明适应性强,且整体结构易于实现、方便操作、效率高、安全性高、检测成本低。
技术研发人员:刘景明,高丽岩,王强,王韬,吕驰,张雅贤,孙昌达,张重阳,孙昱,冯阳,鲁林平,芮成杰
受保护的技术使用者:中国石油化工股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!