一种基于隧道内精确定位的车载设备的制作方法
1.本实用新型涉及列车北斗定位领域,具体是一种基于隧道内精确定位的车载设备。
背景技术:
2.现有铁路机车定位主要采用应答器定位,建设、维护成本大,定位误差大。基于卫星定位导航技术是下一代列车信号控制系统及自动驾驶ato等系统的重要组成部分,北斗卫星导航系统是中国自主实施、独立运行的全球卫星导航系统,具备高安全性和精确性,推广北斗卫星定位在铁路应用已经纳入铁路总公司实现智能铁路的重要工作。
3.在山区峡谷区域,北斗信号较弱,定位不够准确,在铁路隧道与车站之中,北斗信号无法覆盖,因此北斗卫星导航系统无法实施铁路机车的全线导航。
技术实现要素:
4.本实用新型为了解决现有技术的问题,提供了一种基于隧道内精确定位的车载设备,利用dtm数据库将融合输出结果进行地图匹配,能在较低成本下获得列车在隧道内实时、连续、高精度的位置信息。
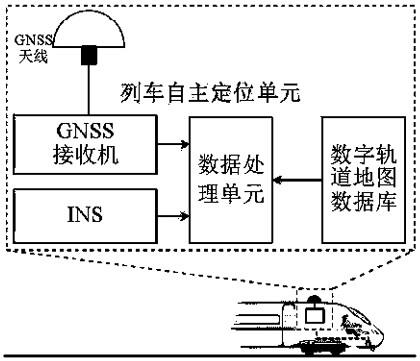
5.本实用新型包括数据处理单元以及与数据处理单元连接的gnss接收机、ins惯性导航设备和数字轨道地图数据库,其中,gnss接收机通过gnss天线与北斗卫星连接,ins惯性导航设备包括惯性测量单元imu和导航计算处理器,ins惯性导航设备获取列车的定位信息,数据处理单元结合北斗信息,列车定位信息和地图信息获得列车隧道内精确定位。
6.进一步改进,所述的惯性测量单元imu包括陀螺仪和加速度计,分别提供角速度变化和比例测量值。
7.进一步改进,所述的列车的定位信息包括列车的位置、速度、姿态。
8.本实用新型有益效果在于:
9.基于此,以gnss和ins作为提供位置信息的基础,由于gnss/ins的融合输出位置结果是基于三维坐标系表达的,为了将其转化为铁路领域的一维里程位置并进
‑‑
步提高定位精度,利用dtm数据库将融合输出结果进行地图匹配,能在较低成本下获得列车在隧道内实时、连续、高精度的位置信息。
附图说明
10.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
11.图1为本实用新型结构示意图。
具体实施方式
12.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
13.本实用新型结构如图1所示,包括数据处理单元以及与数据处理单元连接的gnss接收机、ins惯性导航设备和数字轨道地图数据库,其中,gnss接收机通过gnss天线与北斗卫星连接,ins惯性导航设备包括惯性测量单元imu和导航计算处理器,ins惯性导航设备获取列车的定位信息,数据处理单元结合北斗信息,列车定位信息和地图信息获得列车隧道内精确定位。
14.进一步改进,所述的惯性测量单元imu包括陀螺仪和加速度计,分别提供角速度变化和比例测量值。
15.进一步改进,所述的列车的定位信息包括列车的位置、速度、姿态。
16.依据数据融合时使用gnss观测信息的不同,可以将数据融合方式分为松组合、紧组合和深组合三种。松组合方式使用gnss解算的用户位置及速度作为观测信息,其算法简单易实现,但gnss需要至少接收到四颗以上有效卫星时才能够提供位置及速度信息:紧组合方式使用可见卫星位置及速度、伪距、伪距率作为观测信息,算法比松组合复杂,在仅获取到一颗gnss卫星的观测信息时也实现ins观测信息的校正及融合结果的输出;深组合方式使用gnss跟踪环路的同相、正交信号等作为观测信息,并利用ins信息对gnss的信号进行辅助跟踪,其算法抗干扰能力且精度最高,但其算法极为复杂,且无法基于独立的ins及gnss单元实现而需要改变二者硬件结构。
17.综合不同组合方式的算法复杂度及应用限制条件,在此采用紧组合方式对onss及ins信息进行数据融合。其中gnss输出信息包括伪距及伪距率测量值,均可通过对导航卫星信号的解算获得。ins 由惯性测量单元imu ( inertialmeasurement unit)和导航计算处理器构成,其中imu包括陀螺仪和加速度计,分别提供角速度变化和比力测量值,将二者结合并通过导航计算处理器计算可获得位置、速度、姿态等定位信息。
18.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于设备实施例而言,以上所述仅是本实用新型的优选实施方式,由于其基本相似于方法实施例,所以描述得比较简单,相关之处参见方法实施例的部分说明即可。以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,对于本技术领域的普通技术人员来说,可轻易想到的变化或替换,在不脱离本实用新型原理的前提下,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求的保护范围为准。
技术特征:
1.一种基于隧道内精确定位的车载设备,其特征在于:包括数据处理单元以及与数据处理单元连接的gnss接收机、ins惯性导航设备和数字轨道地图数据库,其中,gnss接收机通过gnss天线与北斗卫星连接,ins惯性导航设备包括惯性测量单元imu和导航计算处理器,ins惯性导航设备获取列车的定位信息,数据处理单元结合北斗信息,列车定位信息和地图信息获得列车隧道内精确定位。2.根据权利要求1所述的基于隧道内精确定位的车载设备,其特征在于:所述的惯性测量单元imu包括陀螺仪和加速度计,分别提供角速度变化和比例测量值。3.根据权利要求1所述的基于隧道内精确定位的车载设备,其特征在于:所述的列车的定位信息包括列车的位置、速度、姿态。
技术总结
本实用新型提供了一种基于隧道内精确定位的车载设备,包括数据处理单元以及与数据处理单元连接的GNSS接收机、INS惯性导航设备和数字轨道地图数据库,其中,GNSS接收机通过GNSS天线与北斗卫星连接,INS惯性导航设备包括惯性测量单元IMU和导航计算处理器,INS惯性导航设备获取列车的定位信息,数据处理单元结合北斗信息,列车定位信息和地图信息获得列车隧道内精确定位。本实用新型利用DTM数据库将融合输出结果进行地图匹配,能在较低成本下获得列车在隧道内实时、连续、高精度的位置信息。高精度的位置信息。高精度的位置信息。
技术研发人员:陈建平 鲍才让太 张文彪 王俊杰 赵海萍 刘鑫 沈得智 马德峰 白德武
受保护的技术使用者:南京泰通科技股份有限公司
技术研发日:2022.01.17
技术公布日:2022/9/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1