射频性能自动测试辅助装置的制作方法
1.本实用新型涉及2g/3g/4g自动化测试技术领域,具体涉及一种射频性能自动测试辅助装置。
背景技术:
2.2g/3g/4g自动化测试中为了保证测试结果的准确性需要根据测试系统的要求在切换测试指标或者切换测试配置时需要待测样品重新注册2g/3g/4g信号,待测样品重新注册2g/3g/4g信号有两个步骤,第一步骤是:通信基站重新打开2g/3g/4g信号;第二步骤是:在第一步完成后,重启待测样品,如果有飞行模式的样品可以通过先打开飞行模式再关闭飞行模式,此步骤是为了让待测样品重新找2g/3g/4g信号并快速完成注册,目前由系统供应商提供2g/3g/4g测试系统ts8980fta2能够自动完成第一个步骤,第二个步骤仍需要通过手动重启待测样品或者通过打开、关闭飞行模式来完成。在这种情形下,需要人工时时监控,时时操作,在耗费大量人力物力的情况下,还大大降低了测试速度,进而导致测试总体效率变低,系统利用率低下,人工成本和经济成本变高。
技术实现要素:
3.为解决上述问题,本实用新型提供了一种自动测试辅助装置,在进行2g/3g/4g自动化测试中利用该装置代替人工完成飞行模式的切换操作,提高了测试速度,同时也降低了人工成本。
4.为实现上述目的,本实用新型首先要设计一个动作装置模拟人手执行点击设备屏幕的动作,然后,设计一个控制电路,控制该动作装置动作。具体可以采用如下方案:
5.一种射频性能自动测试辅助装置,包括:点击动作控制单元和点击动作执行单元;
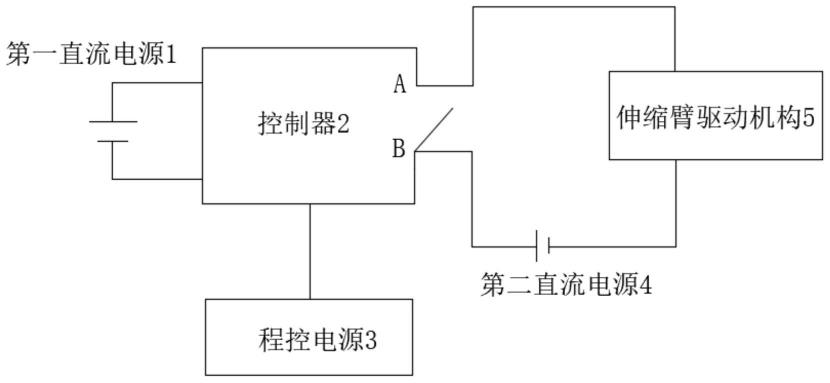
6.所述点击动作控制单元包括第一直流电源和控制器,控制器的电源输入端连接第一直流电源,控制器的信号输入端连接触发源;所述控制器设有两个常开触点,用于根据脉冲信号的变化控制常开触点的打开和闭合;
7.所述点击动作执行单元包括第二直流电源、伸缩臂及伸缩臂驱动机构,所述伸缩臂驱动机构与第二直流电源、控制器的两个常开触点串联,用于在常开触点闭合时控制伸缩臂执行点击动作。
8.如上文所述,本实用新型利用伸缩臂执行点击动作,同时为伸缩臂设置控制电路,控制电路可以借鉴电磁继电器的原理,设置一个电路控制继电器线圈的通断电,进而控制继电器常开触点的开闭,而继电器常开触点又与伸缩臂驱动机构的电源电路串联,从而达到通过继电器控制伸缩臂动作的目的。
9.进一步,所述伸缩臂驱动机构包括壳体,壳体内设有一螺线管,螺线管两端分别连接第二直流电源和控制器;伸缩臂为一铁芯,铁芯纵向穿过螺线管和壳体,铁芯顶端设有磁铁环,铁芯底端设有触摸头,磁铁环和壳体之间设有复位弹簧。本实用新型通过给螺线管通电吸引磁铁环带动铁芯向下移动,从而达到点击待测样品屏幕的目的。螺线管断电后,铁芯
在复位弹簧作用下可以自动复位。
10.由于待测样品多种多样,尺寸不一,为了适应不同的样品,所述伸缩臂下方设有一可升降平台,用于调节待测样品的高度。
11.优选的,所述控制器为一时间继电器,触发源向时间继电器提供脉冲信号,脉冲信号发生高低电平转变时,继电器线圈得电,常开触点闭合,机械臂的电路导通。
12.优选的,所述触发源为程控电源,通过射频测试过程中软件的指令可以控制程控电源的开启与关闭,从而实现自动化操作。
13.本实用新型通过设置一个小装置,结构简单,投入成本低,把人从简单重复的操作中解放出来,大大降低了人工成本和经济成本,提高了测试速度。
附图说明
14.图1是本实用新型的电路原理图;
15.图2是实施例一的使用状态图;
16.图3是实施例二的使用状态图;
17.图4是实施例一、二中伸缩臂驱动机构壳体剖开后结构示意图;
18.图中,1、第一直流电源,2、控制器,3、程控电源,4、第二直流电源,5、伸缩臂驱动机构,51、壳体,52、螺线管,6、铁芯,7、磁铁环,8、复位弹簧,9、触摸头,10、安装座,11,底座,12、l形支架,13、可升降平台。
具体实施方式
19.下面结合附图对本实用新型的实施方式进行详细说明。
20.实施例一
21.一种射频性能自动测试辅助装置,如图1所示,包括第一直流电源1、控制器2和触发源组成的点击动作控制单元以及第二直流电源4、伸缩臂、伸缩臂驱动机构5组成的点击动作执行单元。所述第一直流电源1和第二直流电源4均为5v直流电源。所述触发源采用程控电源3,程控电源3中内置程序,能通过程序控制它的开启和关闭,程控电源开启时,输出5v高电平;程控电源关闭时,高电平信号消失。第一直流电源1与控制器2连接,为控制器供电。控制器2采用时间继电器,时间继电器线圈正极与程控电源正极相连,时间继电器线圈负极与程控电源负极相连,组成继电器输入回路,程控电源按设定频率开启和关闭,为时间继电器提供触发信号。时间继电器的常开触点与伸缩臂驱动机构、第二直流电源串联,以便在常开触点闭合时,为伸缩臂驱动机构供电,驱动伸缩臂执行点击动作。
22.所述点击动作执行单元除了伸缩臂和伸缩臂驱动机构外,还需要一些支撑结构,以便安装伸缩臂和伸缩臂驱动机构。如图2所示,可以采用l形支架12支撑,l形支架12底端安装在底座11上,l形支架12顶端安装伸缩臂驱动机构5和伸缩臂。如图4所示,所述伸缩臂驱动机构5包括壳体51,壳体51一侧设有安装座10,用来与l形支架连接。壳体51内设有螺线管52,螺线管52两端分别与第二直流电源、时间继电器常开触点串联,构成伸缩臂控制回路。伸缩臂为一铁芯6,铁芯6沿竖直方向穿过壳体和螺线管,铁芯6顶端设有磁铁环7,底端设有触摸头9,磁铁环与壳体之间设有复位弹簧8。当继电器的常开触点闭合时,伸缩臂驱动机构内的螺线管通电,产生磁场,吸附磁铁环带动铁芯向下移动,触摸头点击设备屏幕。当
继电器常开触点断开时,螺线管断电,失去对磁铁环的吸力,磁铁环在复位弹簧作用下,推动铁芯复位,触摸头离开屏幕。
23.本实用新型的工作流程:根据射频测试的需求,当待测样品需要重新连接基站时,要求待测样品先打开飞行模式后再关闭飞行模式。将待测样品放到伸缩臂下方的底座上,并使飞行模式开关按钮位于触摸头正下方。首先,软件控制程控电源关闭,控制器触发源端的5v高电平消失,控制器的常开触点闭合1秒,伸缩臂驱动机构电路闭合,伸缩臂向下点击待测样品飞行模式按钮,完成开启飞行模式动作;然后,软件控制程控电源开启,控制器触发源端变为5v高电平,控制器常开触点闭合1秒,机械臂电路闭合,伸缩臂向下点击待测样品飞行模式按钮,完成关闭飞行模式动作。整个过程为一个流程,软件可以编辑重复执行这个完整流程的次数n,直到待测样品连上系统进行测试。
24.实施例二
25.为了实现对各种待测样品的兼容,在实施例一的基础上,如图3所示,将底座改为可升降平台13,待测样品放置在可升降平台上,通过调整平台的高低,使待测样品到伸缩臂触摸头的行程范围内。
技术特征:
1.一种射频性能自动测试辅助装置,其特征在于,包括:点击动作控制单元和点击动作执行单元;所述点击动作控制单元包括第一直流电源和控制器,控制器的电源输入端连接第一直流电源,控制器的信号输入端连接触发源;所述控制器设有两个常开触点,用于根据脉冲信号的变化控制常开触点的打开和闭合;所述点击动作执行单元包括第二直流电源、伸缩臂及伸缩臂驱动机构,所述伸缩臂驱动机构与第二直流电源、控制器的两个常开触点串联,用于在常开触点闭合时控制伸缩臂执行点击动作。2.根据权利要求1所述的射频性能自动测试辅助装置,其特征在于,所述伸缩臂驱动机构包括壳体,壳体内设有一螺线管,螺线管两端分别连接第二直流电源和控制器;伸缩臂为一铁芯,铁芯纵向穿过螺线管和壳体,铁芯顶端设有磁铁环,铁芯底端设有触摸头,磁铁环和壳体之间设有复位弹簧。3.根据权利要求1所述的射频性能自动测试辅助装置,其特征在于,所述伸缩臂下方设有一可升降平台,用于调节待测样品的高度。4.根据权利要求1或2或3所述的射频性能自动测试辅助装置,其特征在于,所述控制器为一时间继电器。5.根据权利要求1或2或3所述的射频性能自动测试辅助装置,其特征在于,所述触发源为程控电源。
技术总结
本实用新型涉及2G/3G/4G自动化测试技术领域,具体涉及一种射频性能自动测试辅助装置。包括点击动作控制单元和点击动作执行单元;所述点击动作控制单元包括第一直流电源和控制器,控制器的电源输入端连接第一直流电源,控制器的信号输入端连接触发源;所述控制器设有两个常开触点,用于根据脉冲信号的变化控制常开触点的打开和闭合;所述点击动作执行单元包括第二直流电源、伸缩臂及伸缩臂驱动机构,所述伸缩臂驱动机构与第二直流电源、控制器的两个常开触点串联,用于在常开触点闭合时控制伸缩臂执行点击动作。本实用新型结构简单,投入成本低,把人从简单重复的操作中解放出来,大大降低了人工成本和经济成本,提高了测试速度。测试速度。测试速度。
技术研发人员:孙交辉 李泽
受保护的技术使用者:中检集团南方测试股份有限公司
技术研发日:2022.03.28
技术公布日:2022/8/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1