一种变压器内检机器人控制装置的制作方法
1.本公开属于变压器技术领域,具体涉及一种变压器内检机器人控制装置。
背景技术:
2.大型油浸式电力变压器是电网的核心装备,容量大,价值高,结构复杂,是变电运行中关注的重点。当变压器出现异常时,往往需要停电后对内部缺陷进行检测和定位,才能确认故障类型,进而确定检修方案。现有手段是需要变压器排油后,由专业人员进入变压器内部进行人工寻找故障点,耗时耗力,存在极大安全隐患。
3.近年来,随着人工智能技术的发展,由机器人代替人工开展变压器带油情况下内检逐渐成熟。但是,目前配备的机器人专用工具存在以下不足:1、简单的长杆勾体结构,可能会损伤变压器内部,造成二次伤害;2、由于变压器内部环境黑暗,无法实现机器人的精确定位,仅通过长杆勾体难以快速勾到机器人。
技术实现要素:
4.针对现有技术中的不足,本公开的目的在于提供一种变压器内检机器人控制装置,该装置通过增加内窥镜,提高了内检机器人的控制效率。
5.为实现上述目的,本公开提供以下技术方案:
6.一种变压器内检机器人控制装置,包括:
7.杆体,所述杆体的一侧设置为把手,另一侧连接有抓钩,
8.所述杆体连接有抓钩的一侧还设置有内窥镜。
9.优选的,所述杆体可伸缩。
10.优选的,所述杆体通过旋转或拼接进行伸缩。
11.优选的,所述杆体为圆柱体或长方体。
12.优选的,所述内窥镜上设置有led灯。
13.优选的,所述把手处设置有手机接口,手机接口与所述内窥镜电连接。
14.与现有技术相比,本公开带来的有益效果为:
15.1、联合应用内窥镜与钩抓机构,弥补了单钩爪机构不能精准控制机器人的缺陷;
16.2、通过增加内窥镜,可以提高内检机器人的抓取效率,能够对内检机器人进行锁定回收,可有效地、准确地、安全的、快速地回收内检机器人。
附图说明
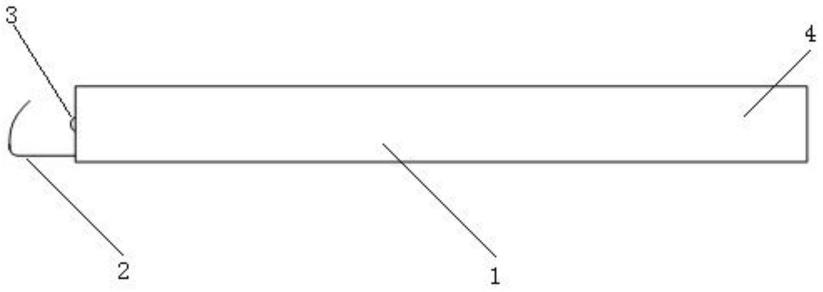
17.图1是本公开一个实施例提供的一种变压器内检机器人控制装置的外部结构示意图;
18.图2是本公开另一个实施例提供的一种变压器内检机器人控制装置的内部结构示意图;
19.图3是内窥镜的结构示意图;
20.附图中的标记说明如下:
21.1、杆体;2、抓钩;3、内窥镜;4、把手;5、手机接口;6、led灯。
具体实施方式
22.下面将参照附图1至图3详细地描述本公开的具体实施例。虽然附图中显示了本公开的具体实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
23.需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名词的差异作为区分组件的方式,而是以组件在功能上的差异作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”或“包括”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本公开的较佳实施方式,然所述描述乃以说明书的一般原则为目的,并非用以限定本公开的范围。本公开的保护范围当视所附权利要求所界定者为准。
24.为便于对本公开实施例的理解,下面将结合附图以具体实施例为例做进一步的解释说明,且各个附图并不构成对本公开实施例的限定。
25.一个实施例中,如图1所示,本公开提供一种变压器内检机器人控制装置,包括:
26.杆体1,
27.所述杆体1的一侧设置为把手4,另一侧连接有抓钩2,
28.所述杆体1连接有抓钩2的一侧还设置有内窥镜3。
29.上述实施例构成了本公开的完整技术方案。本实施例通过增加内窥镜,能够更容易对内检机器人进行搜索,从而能够及时的对内检机器人进行锁定回收以提高抓取效率。
30.另一个实施例中,所述杆体1可伸缩。
31.本实施例中,杆体可通过旋转(像旋转式晾衣杆)或拼接(杆体可分为几节,每节通过连接件连接,可以根据实际需要选择节数)实现可伸缩,以便灵活实现对内检机器人进行近距离或远距离控制。
32.另一个实施例中,所述杆体1为圆柱体或长方体。
33.另一个实施例中,如图3所示,所述内窥镜3上设置有led灯6。
34.本实施例中,内窥镜上周向布置有多个led灯,led灯与内窥镜串联,当内窥镜开始工作后,led灯打开,当内窥镜停止工作后,led灯关闭。
35.另一个实施例中,所述把手处设置有手机接口5,手机接口与所述内窥镜电连接。
36.本实施例中,手机接口设置于把手底端,如图2所示,杆体内设置有连接线以将手机接口和内窥镜连接。通过手机接口可连接手机、可穿戴设备、电脑等,通过定制app控制内窥镜进行摄像和拍照,以及控制led的照明亮度。
37.上述对本申请中涉及的发明的一般性描述和对其具体实施方式的描述不应理解为是对该发明技术方案构成的限制。本领域所属技术人员根据本申请的公开,可以在不违背所涉及的发明构成要素的前提下,对上述一般性描述或/和具体实施方式(包括实施例)中的公开技术特征进行增加、减少或组合,形成属于本申请保护范围之内的其它的技术方案。
技术特征:
1.一种变压器内检机器人控制装置,包括:用于控制内检机器人远近距离的可伸缩杆体,所述杆体的一侧设置为把手,另一侧连接有抓钩,所述杆体连接有抓钩的一侧还设置有内窥镜。2.根据权利要求1所述的装置,其中,所述杆体通过旋转或拼接进行伸缩。3.根据权利要求1所述的装置,其中,所述杆体为圆柱体或长方体。4.根据权利要求1所述的装置,其中,所述内窥镜上设置有led灯。5.根据权利要求1所述的装置,其中,所述把手处设置有手机接口,手机接口与所述内窥镜电连接。
技术总结
本公开揭示了一种变压器内检机器人控制装置,包括:杆体,所述杆体的一侧设置为把手,另一侧连接有抓钩,所述杆体连接有抓钩的一侧还设置有内窥镜。本装置通过增加内窥镜,可以提高内检机器人的抓取效率,能够对内检机器人进行锁定回收,从而弥补了现有装置中单钩爪机构不能精准控制机器人的缺陷。构不能精准控制机器人的缺陷。构不能精准控制机器人的缺陷。
技术研发人员:赵文彬 苏磊 唐文彬 吴迎澳
受保护的技术使用者:国网上海市电力公司
技术研发日:2022.08.03
技术公布日:2023/3/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1