一种拟人机械臂的机械脚结构的制作方法
1.本实用新型属于跑步机测试装置技术领域,尤其是涉及一种拟人机械臂的机械脚结构。
背景技术:
2.在跑步机面市前,跑步机的生产企业或相关的检测部门需要对跑步机的功率、电机工作时的温升等进行测试。由于测试的时间需要几个小时,甚至长达十几个小时,那么必须有一套装置来替代人体对跑步机的作用。
3.中国专利文献公开了一种电动跑步机寿命测试装置[申请号:cn201821267475.7],包括动力传送后飞轮、动力传送前飞轮,动
[0004]
力传送后飞轮通过动力传送链条连接动力传送前飞轮,动力传送前飞轮连接曲柄导杆,曲柄导杆左右两端均通过转轴连接摆臂导杆,摆臂导杆另一端连接悬臂导杆,悬臂导杆顶端通过转轴连接在配重块固定框架前端,配重块固定框架上置有配重块,配重块固定框架支撑于升降杆上,摆臂导杆底部安装脚踝导杆,脚踝导杆底端安装有机械脚,机械脚上装设有传感器,传感器通过线路连接变送器,变送器通过plc连接人机界面。
[0005]
上述方案虽然能够实现拟人机械臂对人体脚掌的模拟,但是该方案依然存在着:无法模拟前脚掌与后脚掌之间的相互运动等问题。
技术实现要素:
[0006]
本实用新型的目的是针对上述问题,提供一种设计合理、结构简单,能够模拟前脚掌与后脚掌之间相互运动的一种拟人机械臂的机械脚结构。
[0007]
为达到上述目的,本实用新型采用了下列技术方案:本拟人机械臂的机械脚结构,包括相互连接的脚踝件和脚掌组件,所述脚掌组件包括前脚掌、弹性连接件和后脚掌,所述前脚掌的后端通过弹性连接件与后脚掌的前端相连。前脚掌和后脚掌通过弹性连接件相连,从而能够模拟人的前脚掌与后脚掌之间的相互运动;在跑步时,人的后脚掌几乎不落地,前脚掌与后脚掌之间存在一个弹性缓冲的作用,从而可进一步模拟出人跑步状态下脚掌的状态。
[0008]
在上述的一种拟人机械臂的机械脚结构中,所述前脚掌的后端下侧设置有前凹槽,所述后脚掌的前端下侧设置有后凹槽,所述弹性连接件设置在前凹槽和后凹槽内。弹性连接件设置在前凹槽和后凹槽内,其下侧不会与其他物体接触,从而防止在模拟人的跑步状态时磨损。
[0009]
在上述的一种拟人机械臂的机械脚结构中,所述前脚掌上设有贯穿至前凹槽的前螺纹孔,所述弹性连接件上设有沿前脚掌长度方向延伸的前条形孔,前螺杆穿过前条形孔后与前螺纹孔螺纹连接;和/或,所述后脚掌上设有贯穿至后凹槽的后螺纹孔,所述弹性连接件上设有沿后脚掌长度方向延伸的后条形孔,后螺杆穿过后条形孔后与后螺纹孔螺纹连接。设置前条形孔和/或后条形孔便于调节前脚掌与后脚掌之间的距离,从而便于模拟不同
脚长。
[0010]
在上述的一种拟人机械臂的机械脚结构中,所述脚踝件与脚掌组件滑动相连,且所述脚踝件与脚掌组件之间设有弹性缓冲件。当拟人机械臂用于测试跑步机时,通过脚踝件与脚掌组件的滑动连接和弹性缓冲件的缓冲,减少了脚掌组件与跑步机跑带之间的冲击力,从而提高跑带的可测试时长。
[0011]
在上述的一种拟人机械臂的机械脚结构中,所述脚踝件下侧设有滑槽,所述后脚掌上侧设有插入至滑槽的滑块,所述滑块上设有供滑杆穿过的滑孔,所述滑杆贯穿滑槽后与脚踝件相连。
[0012]
在上述的一种拟人机械臂的机械脚结构中,所述弹性缓冲件呈套状,所述弹性缓冲件套设于滑杆且数量为滑杆数量的两倍,所述弹性缓冲件两端分别设置在脚踝件与滑块之间。将弹性缓冲件设置在滑杆的两侧,不但对于来自前后的冲击都可以缓冲,而且还增加了缓冲力。
[0013]
在上述的一种拟人机械臂的机械脚结构中,所述脚掌组件还包括脚跟,所述脚跟前端与后脚掌后端相连,所述脚跟的上侧面与后脚掌的上侧面之间呈的角度呈钝角,更加贴近人体的脚跟与后脚掌的形态。
[0014]
在上述的一种拟人机械臂的机械脚结构中,所述脚掌组件底部设有至少两个缓冲垫,其中至少一个缓冲垫设置在前脚掌,至少一个缓冲垫设置在后脚掌。通过缓冲垫来缓冲脚掌组件在模拟跑步时底面受到的冲击,并防止脚掌组件磨损。
[0015]
在上述的一种拟人机械臂的机械脚结构中,所述缓冲垫与脚掌组件可拆式相连。当缓冲垫磨损时,便于更换。
[0016]
在上述的一种拟人机械臂的机械脚结构中,所述缓冲垫上侧设有第一螺纹杆,所述脚掌组件上设有第一螺纹孔,所述第一螺纹杆与第一螺纹孔螺纹相连。
[0017]
与现有的技术相比,本拟人机械臂的机械脚结构的优点在于:
[0018]
1.前脚掌和后脚掌通过弹性连接件相连,从而能够模拟人的前脚掌与后脚掌之间的相互运动;在跑步时,人的后脚掌几乎不落地,前脚掌与后脚掌之间存在一个弹性缓冲的作用,从而可进一步模拟出人跑步状态下脚掌的状态;
[0019]
2.弹性连接件设置在前凹槽和后凹槽内,其下侧不会与其他物体接触,从而防止在模拟人的跑步状态时磨损;
[0020]
3.设置前条形孔和/或后条形孔便于调节前脚掌与后脚掌之间的距离,从而便于模拟不同脚长;
[0021]
4.当拟人机械臂用于测试跑步机时,通过脚踝件与脚掌组件的滑动连接和弹性缓冲件的缓冲,减少了脚掌组件与跑步机跑带之间的冲击力,从而提高跑带的可测试时长;
[0022]
5.将弹性缓冲件设置在滑杆的两侧,不但对于来自前后的冲击都可以缓冲,而且还增加了缓冲力;
[0023]
6.通过缓冲垫来缓冲脚掌组件在模拟跑步时底面受到的冲击,并防止脚掌组件磨损。
附图说明
[0024]
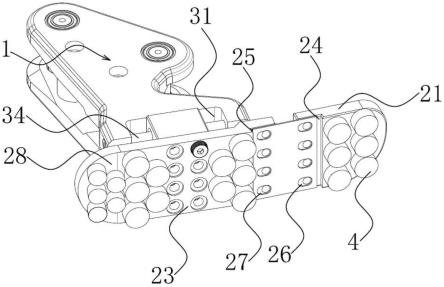
图1提供了本实用新型的结构示意图。
[0025]
图2提供了本实用新型另一视角的结构示意图。
[0026]
图3提供了本实用新型拟人机械臂的结构示意图。
[0027]
图中,脚踝件1、脚掌组件2、前脚掌21、弹性连接件22、后脚掌23、前凹槽24、后凹槽25、前条形孔26、后条形孔27、脚跟28、滑槽31、滑块32、滑孔33、滑杆34、缓冲垫4、第一螺纹杆41。
具体实施方式
[0028]
为了使本实用新型所解决的技术问题、技术方案及有益效果更加清楚明白,下面结合附图和具体实施例对本实用新型做进一步的说明,但本实用新型不限于所描述的实施例,相反,本实用新型包括落入所附权利要求的范围内的全部修改、变型以及等同物。
[0029]
如图1-3所示,本拟人机械臂的机械脚结构,包括相互连接的脚踝件1和脚掌组件2,脚掌组件2包括前脚掌21、弹性连接件22和后脚掌23,前脚掌21的后端通过弹性连接件22与后脚掌23的前端相连;脚掌组件2还包括脚跟28,脚跟28前端与后脚掌23后端相连,脚跟28的上侧面与后脚掌23的上侧面之间呈的角度呈钝角,更加贴近人体的脚跟28与后脚掌23的形态。前脚掌21和后脚掌23通过弹性连接件22相连,从而能够模拟人的前脚掌21与后脚掌23之间的相互运动;在跑步时,人的后脚掌23几乎不落地,前脚掌21与后脚掌23之间存在一个弹性缓冲的作用,从而可进一步模拟出人跑步状态下脚掌的状态。
[0030]
前脚掌21的后端下侧设置有前凹槽24,后脚掌23的前端下侧设置有后凹槽25,弹性连接件22设置在前凹槽24和后凹槽25内。弹性连接件22设置在前凹槽24和后凹槽25内,其下侧不会与其他物体接触,从而防止在模拟人的跑步状态时磨损。
[0031]
前脚掌21上设有贯穿至前凹槽24的前螺纹孔,弹性连接件22上设有沿前脚掌21长度方向延伸的前条形孔26,前螺杆穿过前条形孔26后与前螺纹孔螺纹连接;和/或,后脚掌23上设有贯穿至后凹槽25的后螺纹孔,弹性连接件22上设有沿后脚掌23长度方向延伸的后条形孔27,后螺杆穿过后条形孔27后与后螺纹孔螺纹连接。设置前条形孔26和/或后条形孔27便于调节前脚掌21与后脚掌23之间的距离,从而便于模拟不同脚长。
[0032]
脚踝件1与脚掌组件2滑动相连,且脚踝件1与脚掌组件2之间设有弹性缓冲件,脚踝件1下侧设有滑槽31,后脚掌23上侧设有插入至滑槽31的滑块32,滑块32上设有供滑杆34穿过的滑孔33,滑杆34贯穿滑槽31后与脚踝件1相连;优选地,弹性缓冲件呈套状,弹性缓冲件套设于滑杆34且数量为滑杆34数量的两倍,弹性缓冲件两端分别设置在脚踝件1与滑块32之间。当拟人机械臂用于测试跑步机时,通过脚踝件1与脚掌组件2的滑动连接和弹性缓冲件的缓冲,减少了脚掌组件2与跑步机跑带之间的冲击力,从而提高跑带的可测试时长;将弹性缓冲件设置在滑杆34的两侧,不但对于来自前后的冲击都可以缓冲,而且还增加了缓冲力。
[0033]
脚掌组件2底部设有至少两个缓冲垫4,其中至少一个缓冲垫4设置在前脚掌21,至少一个缓冲垫4设置在后脚掌23;优选地,缓冲垫4与脚掌组件2可拆式相连;更优选地,缓冲垫4上侧设有第一螺纹杆41,脚掌组件2上设有第一螺纹孔,第一螺纹杆41与第一螺纹孔螺纹相连。通过缓冲垫4来缓冲脚掌组件2在模拟跑步时底面受到的冲击,并防止脚掌组件2磨损;当缓冲垫4磨损时,便于更换。
[0034]
本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所
属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
[0035]
尽管本文较多地使用了脚踝件1、脚掌组件2、前脚掌21、弹性连接件22、后脚掌23、前凹槽24、后凹槽25、前条形孔26、后条形孔27、脚跟28、滑槽31、滑块32、滑孔33、滑杆34、缓冲垫4、第一螺纹杆41等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1