模拟测试系统的制作方法
1.本技术属于设备测试的技术领域,涉及一种模拟测试系统,特别是涉及一种模拟测试系统。
背景技术:
2.目前,ar(augmented reality,增强现实)眼镜等新形态的智能穿戴式电子设备,当前大多基于安卓系统开发。与其他穿戴式设备以及手机相比,ar眼镜以及其他视觉类穿戴式设备所显示的画面以及交互方式与使用者的身体姿态以及空间位置强相关,眼镜显示会因位置和姿态调整相应的画面内容。在此类ar眼镜设备的测试过程中,大多基于将设备平放等类似的静态方法去测试,而在实际使用中ar眼镜设备会实时读取用户姿态与空间位置。可见,此类ar眼镜设备测试的准确性与可靠性有待进一步提高。
技术实现要素:
3.本技术实施例提供一种模拟测试系统,通过动态测试方式进一步提高智能穿戴设备测试的准确性与可靠性。
4.本技术实施例一方面提供一种模拟测试系统,用于测试智能穿戴设备;所述模拟测试系统包括:模拟轨道,被配置于所述智能穿戴设备实现第一空间变化;移动载物平台,与所述模拟轨道可移动连接,被配置于设置于所述移动载物平台上的所述智能穿戴设备实现三自由度的第一姿态变化;测试主机,分别与所述移动载物平台、所述智能穿戴设备通信连接,被配置于向所述移动载物平台、所述智能穿戴设备发出测试指令,以使所述移动载物平台基于所述测试指令带动所述智能穿戴设备沿所述模拟轨道实现预设动作,所述智能穿戴设备实现预设动作时生成第一操作指令。
5.在一种可能的实施方式中,所述测试主机还被配置于:接收所述智能穿戴设备的第一空间数据和第一姿态数据,其中,所述第一空间数据为所述智能穿戴设备被预设放置于所述移动载物平台上时的空间数据,所述第一姿态数据为所述智能穿戴设备被预设放置于所述移动载物平台上时的三自由度姿态数据;接收所述智能穿戴设备的至少一个第二空间数据和至少一个第二姿态数据,其中,所述第二空间数据为所述智能穿戴设备基于所述测试指令实现预设动作时的空间数据,所述第二姿态数据为所述智能穿戴设备基于所述测试指令实现预设动作时的三自由度姿态数据;基于所述第一空间数据、所述第二空间数据以及所述第一姿态数据、所述第二姿态数据确定实现预设动作时所述智能穿戴设备的空间和姿态变化。
6.在一种可能的实施方式中,所述测试主机还被配置于:接收所述智能穿戴设备实现预设动作次数以及生成第一操作指令次数,确定所述智能穿戴设备的第一操作成功率。
7.在一种可能的实施方式中,所述测试主机还被配置于:接收所述智能穿戴设备通过所述移动载物平台沿所述模拟轨道实现预设动作过程时处理器数据和存储器数据,其中,所述处理器数据和存储器数据包括峰值数据和平均数据。
8.在一种可能的实施方式中,所述模拟轨道包括:直行轨道、弯道、高低起伏轨道或螺旋轨道中的至少一种或多种组合。
9.在一种可能的实施方式中,所述模拟轨道还被配置于:所述模拟轨道的设计精度不低于所述智能穿戴设备的定位精度;其中,所述设计精度是指模拟轨道使得所述移动载物平台发生平移的精度,所述定位精度是指所述智能穿戴设备具备的平移精度。
10.在一种可能的实施方式中,所述智能穿戴设备包括第一无线通信模块;所述智能穿戴设备通过所述第一无线通信模块与所述测试主机通信连接。
11.在一种可能的实施方式中,所述移动载物平台包括:六自由度模拟转台和轨道小车;所述六自由度模拟转台设有载物面,所述载物面被配置于放置所述智能穿戴设备;所述六自由度模拟转台和所述轨道小车固定连接;所述轨道小车与所述模拟轨道可移动连接。
12.在一种可能的实施方式中,所述移动连接为滚动连接;所述轨道小车底部设有车轮,所述模拟轨道包括双轨和所述双轨中间固定间距设置的连杆;所述轨道小车的车轮通过与所述连杆之间的摩擦力实现滚动连接。
13.在一种可能的实施方式中,所述轨道小车包括第二无线通信模块;所述轨道小车通过所述第二无线通信模块与所述测试主机通信连接。
14.在一种可能的实施方式中,所述六自由度模拟转台包括六轴转向平台,所述六轴转向平台转动时模拟所述智能穿戴设备实现六自由度的第一姿态变化;所述六轴转向平台包括第三无线通信模块;所述六轴转向平台通过所述第三无线通信模块与所述测试主机通信连接。
15.在一种可能的实施方式中,所述模拟轨道上设有空间位置参考装置,所述移动载物平台行驶在所述模拟轨道上经过所述空间位置参考装置时,所生成的空间位置参考数据用于关联所述智能穿戴设备当前的空间数据,通过分析所述空间数据与空间位置参考数据的偏差程度,进行空间位置精度判定。
16.在一种可能的实施方式中,所述空间位置参考装置包括感应磁片或压力传感器。
17.如上所述,本技术实施例所述的模拟测试系统,以测试ar眼镜为例,具有以下有益效果:
18.本技术实施例模拟轨道提供智能穿戴设备上下、前后和左右三个平移自由度的空间位置变化的运行环境,移动载物平台用于放置所述智能穿戴设备,带动智能穿戴设备执行x、y、z三个转动自由度的位置变化,所以放置智能穿戴设备的移动载物平台在模拟轨道上运行,通过立体轨道系统与六轴转台结合,实现ar眼镜六自由度位置姿态模拟。
19.本技术实施例通过六轴转向平台可以模仿ar眼镜用户的头部姿态变化,通过模拟轨道模拟ar眼镜在实际使用中的空间位置变化,由此,本技术设计了基于模仿头部姿态变化以及空间位置变化的软件自动化测试系统。
20.本技术实施例通过ar眼镜在模拟轨道上运行实时返回的姿态数据、性能数据、功耗数据和稳定性数据等测试数据的分析,提高了ar眼镜软件测试结果的准确性与可靠性。
21.本技术实施例通过测试主机与ar眼镜的第一无线通信模块通信连接、与轨道小车的第二无线通信模块通信连接以及与六轴转向平台的第三无线通信模块通信连接,实现了测试执行机加wifi控制,提高了ar眼镜软件测试阶段的测试效率,减少软件测试工作人力投入。
22.本技术实施例实现ar眼镜真实模拟使用状态6dof模拟的自动化测试。其中,在模仿ar眼镜用户的头部姿态变化时,通过球形三维姿态位置app配合六轴转台进行姿态控制,实现ar眼镜3dof姿态评估的精度动态测试。
附图说明
23.图1a显示为本技术实施例提供的一种智能穿戴设备的示意图。
24.图1b显示为本技术一实施例中的模拟测试系统于一实施例中的结构连接示意图。
25.图2显示为本技术一实施例中的模拟测试系统于一实施例中的空间位置变化示意图。
26.图3显示为本技术一实施例中的模拟测试系统于一实施例中的模拟轨道示意图。
27.图4显示为本技术一实施例中的模拟测试系统于一实施例中的模拟轨道结构图。
28.图5显示为本技术一实施例中的模拟测试系统于一实施例中的通信架构图。
29.图6显示为本技术一实施例中的模拟测试系统于一实施例中的姿态模型示意图。
30.元件标号说明
31.101
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
镜架主体
32.102
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一镜腿
33.103
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二镜腿
34.104
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传感器
35.105
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电路
[0036]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
模拟轨道
[0037]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
移动载物平台
[0038]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
测试主机
具体实施方式
[0039]
以下通过特定的具体实例说明本技术的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本技术的其他优点与功效。本技术还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本技术的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
[0040]
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本技术的基本构想,遂图示中仅显示与本技术中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
[0041]
图1a示出了本技术实施例提供的一种智能穿戴设备的示意图。作为示例,该智能穿戴设备可以为智能眼镜,或者其他例如智能手环、智能手表或应用穿戴式技术对日常穿戴进行智能化设计、开发出可以穿戴的设备,本技术实施例对此不作限定。如图1a所示,该智能眼镜包括镜架主体101、第一镜腿102、第二镜腿103、传感器104以及电路105。其中,镜架主体101设置有镜片,还包括与第一镜腿102连接的第一端,以及与第二镜腿连接的第二端。传感器104与电路105连接。
[0042]
电路105具体可以为处理器,例如中央处理器(central processing unit,cpu)、系统级芯片(system on chip,soc)等,本技术实施例对此不作限定。
[0043]
传感器104具体可以为惯性测量单元(inertial measurement unit,imu),智能眼镜通过传感器104采集智能眼镜当前的六自由度信息,电路105根据传感器104采集的六自由度信息确定实现的预设动作,并生成第一操作指令。
[0044]
在一些示例中,智能眼镜还可以包括a/d转换器,上述a/d转换器分别与传感器104和电路105连接,用于将传感器104采集的模拟数据转换为数字数据后发送至电路105中,需要说明的是,上述a/d转换器也可以被集成到传感器104或电路105中,本技术实施例对此不作限定。
[0045]
需要说明的是,图1a仅作为示例而非限定,例如,在本技术实施例中,传感器104或电路105不仅可以设置在第一镜腿102上,还可以设置于镜架主体101,或第二镜腿103上。又例如,传感器104或电路105不仅可以设置在镜腿内,还可以设置于镜腿外(比如突出于镜腿设置)。又例如,传感器的数量还可以大于一个,比如两个,或者三个。
[0046]
在一些描述中,第一镜腿102和第二镜腿103也可以被称为左右镜腿。也就是说,在一些描述中,“左右镜腿”与“第一镜腿102和第二镜腿103”具有相同的含义,可以进行等价替换。
[0047]
作为示例,传感器还可以包括电子罗盘、指南针、陀螺仪、霍尔传感器、光学传感器等,本技术实施例对此不作限定。
[0048]
本技术所述的模拟测试系统实现了利用六自由度结构模拟ar眼镜真实使用状态的自动化测试。本技术提供了一种用于测试ar眼镜实际使用中,例如佩戴者头部运动状态下的自动化测试结构方案,可以提高ar眼镜软件测试中的精度与可靠性,同时通过对该系统结构的全自动化控制提高测试效率。
[0049]
其中,3dof是指姿态变化的3个转动角度的自由度。6dof是指3个转动角度的自由度,与上下、前后、左右等3个位置相关的自由度。ar(augmented reality,增强现实)是一种将虚拟信息与真实世界巧妙融合的技术,将计算机生成的文字、图像、三维模型、音乐、视频等虚拟信息模拟仿真后,应用到真实世界中,两种信息互为补充,从而实现对真实世界的“增强”。
[0050]
以下将结合图1a至图6详细阐述本实施例的一种模拟测试系统的原理及实施方式,使本领域技术人员不需要创造性劳动即可理解本实施例的模拟测试系统。
[0051]
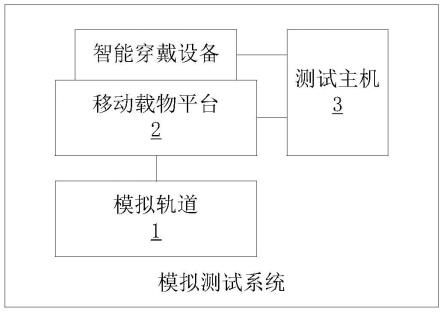
请参阅图1b,显示为本技术一实施例中的模拟测试系统于一实施例中的结构连接示意图。如图1b所示,所述模拟测试系统用于测试智能穿戴设备,所述智能穿戴设备以ar眼镜为例。所述模拟测试系统包括:模拟轨道1、移动载物平台2和测试主机3。
[0052]
所述模拟轨道1被配置于所述智能穿戴设备4实现第一空间变化。
[0053]
所述移动载物平台2与所述模拟轨道1可移动连接,被配置于设置于所述移动载物平台2上的所述智能穿戴设备4实现三自由度的第一姿态变化。
[0054]
所述测试主机3分别与所述移动载物平台2、所述智能穿戴设备4通信连接,被配置于向所述移动载物平台2、所述智能穿戴设备4发出测试指令,以使所述移动载物平台2基于所述测试指令带动所述智能穿戴设备4沿所述模拟轨道实现预设动作,所述智能穿戴设备实现预设动作时生成第一操作指令。
[0055]
请参阅图2,显示为本技术一实施例中的模拟测试系统于一实施例中的空间位置变化示意图。如图2所示,本技术主要实现模拟ar眼镜实际使用中用户的头部姿态变化,即3dof姿态模拟。将ar眼镜放置于电动可编程控制的移动载物平台的载物面上,模拟头部姿态变化,包括抬头40度、低头40度、向左转90度、向右转90度等人佩戴时常用姿态变化规律。
[0056]
请参阅图3,显示为本技术一实施例中的模拟测试系统于一实施例中的模拟轨道示意图。如图3所示,本技术的模拟轨道需具备立体三个方向的轨道、直线方向轨道、垂直斜向上、斜向下轨道以及水平弯道各种方式的结合,用于模拟ar眼镜立体空间位置的变化。
[0057]
请参阅图4,显示为本技术一实施例中的模拟测试系统于一实施例中的模拟轨道结构图。如图4所示,所述模拟轨道包括:直行轨道、弯道、高低起伏轨道或螺旋轨道中的至少一种或多种组合。
[0058]
需要说明的是,图4中模拟轨道的结构仅为其中一种示例,其他的可以实现模拟ar眼镜空间位置变化的具备图3特征的任何一种轨道结构或其变形均在本技术保护的范围内。
[0059]
于一实施例中,所述测试主机还被配置于:接收所述智能穿戴设备的第一空间数据和第一姿态数据,其中,所述第一空间数据为所述智能穿戴设备被预设放置于所述移动载物平台上时的空间数据,所述第一姿态数据为所述智能穿戴设备被预设放置于所述移动载物平台上时的三自由度姿态数据;接收所述智能穿戴设备的至少一个第二空间数据和至少一个第二姿态数据,其中,所述第二空间数据为所述智能穿戴设备基于所述测试指令实现预设动作时的空间数据,所述第二姿态数据为所述智能穿戴设备基于所述测试指令实现预设动作时的三自由度姿态数据;基于所述第一空间数据、所述第二空间数据以及所述第一姿态数据、所述第二姿态数据确定实现预设动作时所述智能穿戴设备的空间和姿态变化。
[0060]
于一实施例中,所述测试主机还被配置于:接收所述智能穿戴设备实现预设动作次数以及生成第一操作指令次数,确定所述智能穿戴设备的第一操作成功率。
[0061]
于一实施例中,所述测试主机还被配置于:接收所述智能穿戴设备通过所述移动载物平台沿所述模拟轨道实现预设动作过程时处理器数据和存储器数据,其中,所述处理器数据和存储器数据包括峰值数据和平均数据。
[0062]
于一实施例中,所述模拟轨道的设计精度不低于所述ar眼镜的定位精度;其中,所述设计精度是指模拟轨道使得所述移动载物平台发生平移的精度,所述定位精度是指所述智能穿戴设备例如ar眼镜具备的平移精度。
[0063]
于一实施例中,所述模拟轨道上设有空间位置参考装置,所述移动载物平台行驶在所述模拟轨道上经过所述空间位置参考装置时,所生成的空间位置参考数据用于关联所述ar眼镜当前的空间数据,通过分析所述空间数据与空间位置参考数据的偏差程度,进行空间位置精度判定。
[0064]
如图4所示,于实际应用中,所述空间位置参考装置包括感应磁片或压力传感器。
[0065]
于实际应用中,所述移动载物平台包括:三自由度模拟转台和轨道小车,所述三自由度模拟转台和所述轨道小车固定连接;所述三自由度模拟转台设有载物面,所述载物面上固定有所述ar眼镜;所述轨道小车与所述模拟轨道移动连接,所述三自由度模拟转台包括六轴转向平台。图4为进行眼镜空间位置变化模拟的小车轨道系统,轨道小车匀速在轨道
系统中运动;同时在轨道小车之上的六轴转向平台进行佩戴姿态模拟;以此小车轨道系统以及六轴转向平台进行ar眼镜的6dof模拟,即眼镜的空间位置变化加眼镜的姿态变化。同时在轨道系统中若干位置锚定空间位置参考点,例如使用感应磁片或其他用于设定于固定位置进行感应的装置,进行6dof空间位置精度判定。进一步地,模拟轨道的实际搭建规模需要根据ar眼镜的定位精度来设计,至少保持与ar眼镜定位精度同一数量级的空间规模或者更高数量级的规模。六轴转向平台的转动灵敏度也需要保持与ar眼镜定位精度同一数量级的空间规模或者更高数量级的规模。具体地,感应磁片可以是在模拟轨道上固定的螺钉或者其他能被模拟小车感应为电信号的任何部件。模拟小车通过nfc(near field communication,近场通信)感应螺钉,然后将感应信号通过通信传送至测试主机,以便测试主机将该位置空间坐标信息与ar眼镜行驶该位置时的姿态数据等测试数据进行关联。
[0066]
请参阅图5,显示为本技术一实施例中的模拟测试系统于一实施例中的通信架构图。如图5所示,虚线椭圆中标出的是载有待测ar眼镜的六轴转向平台和轨道小车。
[0067]
所述ar眼镜包括第一无线通信模块;所述第一无线通信模块与所述测试主机通信连接。
[0068]
于一实施例中,所述移动连接为滚动连接;所述轨道小车底部设有车轮,所述模拟轨道包括双轨和所述双轨中间固定间距设置的连杆;所述轨道小车的车轮通过与所述连杆之间的摩擦力实现滚动连接。
[0069]
于一实施例中,所述轨道小车包括第二无线通信模块;所述第二无线通信模块与所述测试主机通信连接。
[0070]
于一实施例中,所述六轴转向平台转动时模拟所述ar眼镜的第一姿态变化即用户的头部姿态变化;所述头部姿态变化至少包括抬头40度、低头40度、向左转90度或向右转90度中的一种;所述六轴转向平台包括第三无线通信模块;所述第三无线通信模块与所述测试主机通信连接。
[0071]
示例性地,所述第一无线通信模块、所述第二无线通信模块、所述第三无线通信模块与所述测试主机可以使用无线通信与网络进行连接通信,上述无线通信可以是短距离无线传输技术,例如wi-fi、蓝牙(bluetooth,bt)或者近距离无线通信(near field communication,nfc)等,上述无线通信还可以是远距离无线传输技术,包括全球移动通讯系统(global system for mobile communications,gsm),通用分组无线服务(general packet radio service,gprs),码分多址接入(code divisionmultiple access,cdma),宽带码分多址(wideband code division multiple access,wcdma),时分码分多址(time-division code division multiple access,td-scdma),长期演进(long term evolution,lte),新无线(new radio,nr),gnss,fm(frequency modulation,调频),和/或ir(infrared radiation,红外)技术等。所述gnss可以包括全球卫星定位系统(global positioning system,gps),全球导航卫星系统(global navigation satellite system,glonass),北斗卫星导航系统(beidou navigation satellite system,bds),准天顶卫星系统(quasi-zenithsatellite system,qzss)和/或星基增强系统(satellite based augmentation systems,sbas)等。
[0072]
请参阅图6,显示为本技术一实施例中的模拟测试系统于一实施例中的姿态模型示意图。如图6所示,本技术将ar眼镜放置于电动可编程编程六轴转向台中,实现模拟ar眼
镜实际使用中用户的头部姿态变化3dof姿态模拟。具体模拟的头部姿态变化包括:抬头40度、低头40度、向左转90度、向右转90度等人佩戴时常用姿态变化规律。图6呈现了3维姿态测试app示意图,带有网格编号的3维球体,配合六轴平台的实时姿态控制,依据不同姿态下固定球体对应的显示进行姿态位置动态测试。
[0073]
于实际应用中,模拟测试系统由两大部分组成:(1)由wifi控制的轨道小车、六轴头部姿态模拟转向平台(3dof模拟)、测试样眼镜机、模拟轨道组成的6dof实验室模拟系统。(2)由测试主机或服务器以及无线路由器组成的自动化测试系统。
[0074]
进一步地,自动化测试系统在使用过程中相关的软件支持包括:头部运动模拟算法、6dof精度测试app、安卓性能/稳定性/功耗测试软件(例如monkey稳定性测试软件、性能监控测试软件、android老化脚本等自动化测试软件)。
[0075]
测试主机包括控制及数据存储模块,测试主机通过wifi网络控制小车运动速度、六轴平台的姿态以及通过wifi发送android自动化测试软件向ar眼镜输出的测试命令;同时测试主机或服务器通过wifi接收ar眼镜返回的姿态、性能、功耗、稳定性等测试数据,并进行测试数据分析,输出测试结果图表。
[0076]
综上所述,本技术所述模拟测试系统通过立体轨道系统与六轴转台结合,实现ar眼镜6dof位置姿态模拟,设计了基于模仿头部姿态变化以及空间位置变化的软件自动化测试系统。提高了ar眼镜软件测试结果的准确性与可靠性。测试执行机加wifi控制,提高了ar眼镜软件测试阶段的测试效率,减少软件测试工作人力投入。实现ar眼镜真实模拟使用状态6dof模拟的自动化测试。球形三维姿态位置app配合六轴转台进行姿态控制,实现ar眼镜3dof姿态评估的精度动态测试。
[0077]
上述实施例仅例示性说明本技术的原理及其功效,而非用于限制本技术。任何熟悉此技术的人士皆可在不违背本技术的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本技术所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本技术的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1