机械臂探测结构和隧道诊断车
本技术涉及隧道检测,特别涉及一种机械臂探测结构和隧道诊断车。
背景技术:
1、城市轨道交通具有安全、快捷、绿色环保等突出特点,我国城市轨道交通发展迅速,在运营线路规模、在建线路规模和客流规模上均位居全球第一。
2、目前,针对各种隧道病害,人眼检测和人工仪器检测等方式有着准确率低、效率较低等缺点,采用隧道检测车则可以快速的采集隧道数据。而隧道表面常存在管路等突出壁面的障碍物,避让不及时可能损坏设备结构,甚至导致安全事故。
技术实现思路
1、本实用新型的主要目的是提供一种机械臂探测结构,旨在实时精准避障,提高检测安全性和设备的自动化程度。
2、为实现上述目的,本实用新型提出的机械臂探测结构包括:
3、机械臂,所述机械臂设有固定端和活动端,所述固定端固定于安装面,所述活动端相对于所述固定端可伸缩设置,所述活动端用于安装雷达天线;和
4、探测件,所述探测件设于所述活动端,并用于检测所述活动端行进方向上的障碍物,在探测到障碍物时,所述机械臂回缩以实现避障。
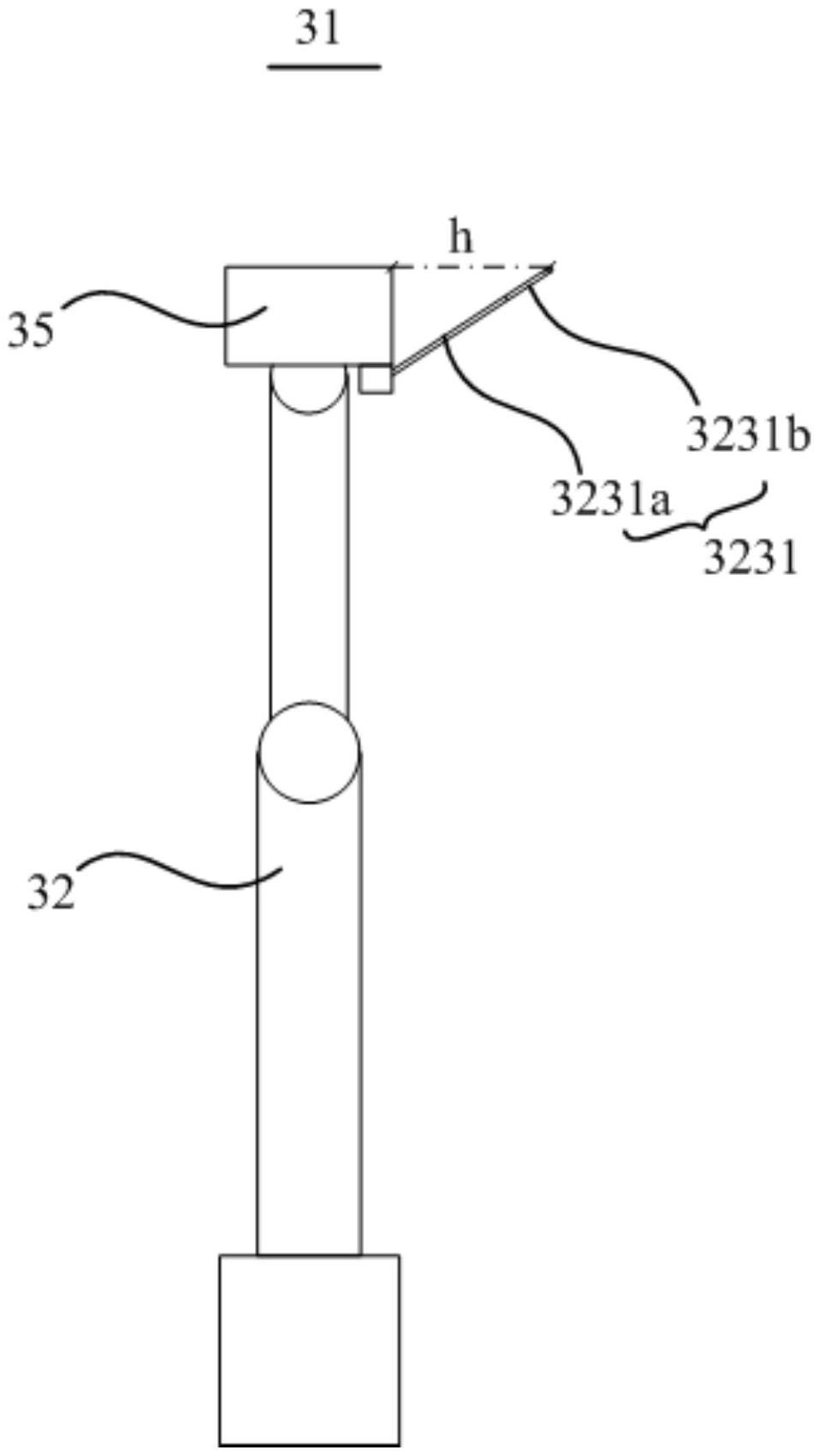
5、在一实施例中,所述探测件设有朝向所述机械臂行进方向一侧延伸设置的探针,所述探针远离所述活动端的一端与所述雷达天线间隔设置。
6、在一实施例中,所述探针包括:
7、连接部,所述连接部为伸杆,所述连接部的一端连接所述活动端;和
8、探测部,所述探测部连接于所述连接部远离所述活动端的一端,所述探测部为弹性软体,并在触碰障碍物时形变以产生信号。
9、在一实施例中,所述连接部倾斜设置,以使所述探测部远离所述连接部的一端与所述雷达天线的上表面齐平。
10、在一实施例中,所述探测件包括多个探针,多个所述探针沿所述雷达天线朝向行进方向的一侧均匀间隔分布;
11、其中,多个所述探测部远离所述连接部的端部之间的最大距离为s1,雷达天线朝向行进方向的一侧的长度为s2,满足关系:s1>s2。
12、在一实施例中,所述探测件为毫米波雷达或深度相机。
13、在一实施例中,所述机械臂包括:
14、至少两个关节,每一所述关节设有至少一个转轴,其中一所述关节设有所述固定端,其中另一所述关节设有所述活动端;和
15、至少一个伸臂,所述伸臂的两端分别连接两个不同的所述关节的所述转轴上。
16、在一实施例中,所述机械臂包括:
17、第一关节,所述第一关节包括第一转轴和设于所述第一转轴一侧的第二转轴,所述第一转轴设有所述固定端;
18、第二关节,所述第二关节设有第三转轴;
19、第三关节,所述第三关节设有第四转轴、设于所述第四转轴一端的第五转轴及设于所述第五转轴一端的第六转轴,所述第六转轴设有所述活动端;及
20、第一伸臂和第二伸臂,所述第一伸臂连接所述第二转轴和所述第三转轴,所述第二伸臂连接所述第三转轴和所述第四转轴。
21、在一实施例中,所述机械臂包括:
22、首级机械臂,所述首级机械臂的一端为所述固定端;
23、至少一个次级机械臂,所述至少一个次级机械臂可伸缩地连接所述首级机械臂;及
24、末级机械臂,所述末级机械臂可伸缩地连接所述次级机械臂,所述末级机械臂远离所述次级机械臂的一端设有所述活动端。
25、本实用新型还提出一种隧道诊断车,所述隧道诊断车包括:
26、车体,所述车体的前侧设有避障雷达;和
27、隐蔽病害检测设备,所述隐蔽病害检测设备包括如上述任一实施例所述的机械臂探测结构和雷达天线,所述机械臂探测结构连接所述车体,所述机械臂的所述活动端连接所述雷达天线,所述雷达天线设有朝向隧道表面的测距仪。
28、本实用新型技术方案通过在机械臂的活动端设置探测件,可以准确、及时地探测到机械臂前进路径上可能遇到的障碍,以便于机械臂伸缩实现避障,保证检测过程的安全性,保护设备安全且通过自动的避障操作提高设备的自动化和智能化。
技术特征:
1.一种机械臂探测结构,其特征在于,包括:
2.如权利要求1所述的机械臂探测结构,其特征在于,所述探测件设有朝向所述机械臂行进方向一侧延伸设置的探针,所述探针远离所述活动端的一端与所述雷达天线间隔设置。
3.如权利要求2所述的机械臂探测结构,其特征在于,所述探针包括:
4.如权利要求3所述的机械臂探测结构,其特征在于,所述连接部倾斜设置,以使所述探测部远离所述连接部的一端与所述雷达天线的上表面齐平。
5.如权利要求3所述的机械臂探测结构,其特征在于,所述探测件包括多个探针,多个所述探针沿所述雷达天线朝向行进方向的一侧均匀间隔分布;
6.如权利要求1所述的机械臂探测结构,其特征在于,所述探测件为毫米波雷达或深度相机。
7.如权利要求1所述的机械臂探测结构,其特征在于,所述机械臂包括:
8.如权利要求7所述的机械臂探测结构,其特征在于,所述机械臂包括:
9.如权利要求1所述的机械臂探测结构,其特征在于,所述机械臂包括:
10.一种隧道诊断车,其特征在于,所述隧道诊断车包括:
技术总结
本技术公开一种机械臂探测结构和隧道诊断车,机械臂探测结构包括机械臂和探测件,机械臂设有固定端和活动端,固定端固定于安装面,活动端相对于固定端可伸缩设置,活动端用于安装雷达天线,探测件设于活动端,并用于检测活动端行进方向上的障碍物,在探测到障碍物时,机械臂回缩以实现避障。本申请的机械臂探测结构通过在机械臂的活动端设置探测件,可以准确、及时地探测到机械臂前进路径上可能遇到的障碍,以便于机械臂伸缩实现避障,保证检测过程的安全性,保护设备安全且通过自动的避障操作提高设备的自动化和智能化。
技术研发人员:赵杨平,王俊芳,任伟新,杜彦良
受保护的技术使用者:深圳大学
技术研发日:20220927
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!