压阻薄膜压力传感器、机械臂或机器人、运动器材的制作方法
【】本技术涉及压力传感器,尤其涉及一种压阻薄膜压力传感器、机械臂或机器人、运动器材。
背景技术
0、
背景技术:
1、压阻式薄膜压力传感器可以感应施加在其表面的压力,从而可以精确检测压力的大小,但是不能精确检测受压部位的位置。为了能够检测受压部位的具体位置,将压阻式薄膜压力传感器的电极改造成正交电极的形式,即在一层承载层(常常为顶层(top))上形成有x方向的电极,而在另一层承载层(常常为底层(bot))上形成有y方向的电极,结合之后通过检测x、y方向上的导通情况判断压阻薄膜压力传感器上每个感应点的按压情况以及确定受压的详细位置。但是,采用正交电极制成的压阻式薄膜压力传感器的结构比较复杂,至少需要三层才能实现功能(top电极片、压感膜材、bot电极片),厚度较大,这会导致压阻式薄膜压力传感器的柔性较差,压感灵敏度下降,尤其是在曲面环境使用时,压感效应下降甚至无法在曲面表面使用。此外,这样的结构,由于结构复杂,因此具有较大的加工难度。
技术实现思路
0、
技术实现要素:
1、本实用新型的目的之一在于提供一种压阻薄膜压力传感器,以解决现有压阻薄膜压力传感器厚度较大而导致柔性较差、压感灵敏度下降的问题。
2、为实现上述技术目标,本实用新型采用的技术方案如下:
3、一种压阻薄膜压力传感器,包括:
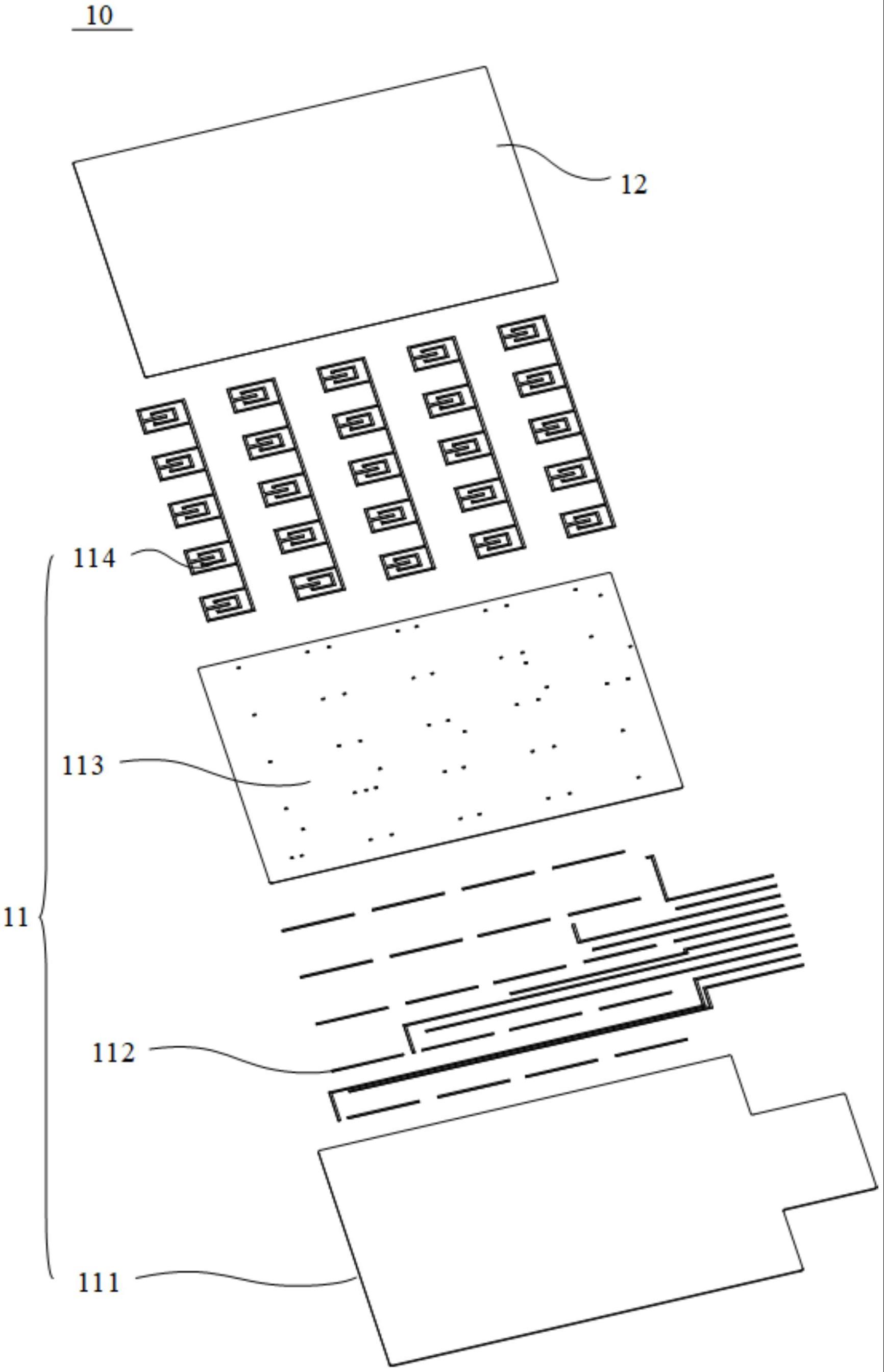
4、电极层,所述电极层包括承载层、导线丝印层、绝缘丝印层和电极丝印层;所述承载层和所述绝缘丝印层层叠设置,所述导线丝印层和所述电极丝印层中的一者层叠于所述承载层和所述绝缘丝印层之间、另一者层叠于所述绝缘丝印层背对所述承载层的表面;
5、所述导线丝印层包括多组正导线组和多组负导线组;所述绝缘丝印层设有若干第一通孔和若干第二通孔;所述电极丝印层包括成多行多列且间隔排布的多个电极对,每个所述电极对包括间隔设置的正极结构和负极结构;每组所述负导线组串联同一行的所述负极结构,且所述负导线组与所述负极结构于所述第一通孔连通;每组所述正导线组串联同一列的所述正极结构,且所述正导线组与所述正极结构于所述第二通孔导通;
6、压阻膜层,所述压阻膜层叠设于所述电极层的表面且遮盖所述绝缘丝印层。
7、在一些实施方式中,所述承载层、所述导线丝印层、所述绝缘丝印层和所述电极丝印层依次层叠设置;
8、或者,所述承载层、所述电极丝印层、所述绝缘丝印层和所述导线丝印层依次层叠设置。
9、在一些实施方式中,所述承载层包括承托部和接头部,所述接头部自所述承托部的边缘与所述承托部连接,且所述接头部和所述承托部共平面;
10、每组所述正导线组包括正引出部和多段正连接部,所述正引出部与其中一个所述正极结构连接,且在所述承载层的正投影落在所述接头部上,所有的所述正连接部在所述承载层的正投影落在所述承托部上,且每段所述正连接部与同一列中相邻的两个所述正极结构连接。
11、在一些实施方式中,每组所述负导线组包括负引出部,所述电极丝印层还包括多组负接线丝印,每组所述负接线丝印连接同一行中的所有所述负极结构,以使同一行的所有所述负极结构串联,每条所述负引出部与一组所述负接线丝印于所述第一通孔对应连接。
12、在一些实施方式中,所述电极对中所述正极结构和所述负极结构之间的间距不大于50mm。
13、在一些实施方式中,所述承载层包括聚对苯二甲酸乙二醇酯层、聚碳酸酯层、聚酰亚胺层中的至少一层;
14、和/或,所述承载层的厚度为0.02mm~1.5mm。
15、在一些实施方式中,所述压阻薄膜压力传感器还包括导电丝印层,所述导电丝印层丝印于所述压阻膜层背对所述承载层的表面。
16、在一些实施方式中,所述导电丝印层包括多个且成多行多列间隔分布,每个所述导电丝印层与一个所述电极对对应。
17、相对于现有技术而言,本实用新型实施例提供的压阻薄膜压力传感器中,电极层包括承载层和导线丝印层、绝缘丝印层以及电极丝印层,由于绝缘丝印层和承载层层叠设置,并且导线丝印层和电极丝印层中的一者层叠于承载层和绝缘丝印层之间、另一者层叠于绝缘丝印层背对承载层的表面,这样可以使得两个电极均设置在压阻膜层的同一表面,并且导线丝印层、绝缘丝印层和电极丝印层以丝印的方式形成,不仅减少了一层承载层,而且还能使得压阻薄膜压力传感器的厚度更薄,具有良好的柔性,提高了压阻薄膜压力传感器的压感灵敏度,尤其可以有效提高压阻薄膜压力传感器在曲面环境在的压感效应,将压阻薄膜压力传感器贴设在曲面部位,仍然可以精确检测压力大小和受压部位的精确位置。
18、进一步地,本实用新型的目的之二是提供一种机械臂或者机器人或者运动器材。
19、其采用的技术方案如下:
20、一种机械臂或者机器人,所述机械臂或者所述机器人包括上述所述的压阻薄膜压力传感器。
21、以及,一种运动器材,所述运动器材包括智能拳击手套、智能拳靶中的任一种,所述运动器材包括上述所述的压阻薄膜压力传感器。
22、与现有技术相比,本实用新型提供的机械臂或者机器人或者运动器材,由于包括上述的压阻薄膜压力传感器,因而可有效检测外部挤压或碰撞的力量大小以及受压部位的精确位置,并且检测灵敏度高,尤其可以提高曲面部位受到的压力大小和受压部位的精确位置。
技术特征:
1.一种压阻薄膜压力传感器,其特征在于,包括:
2.如权利要求1所述的压阻薄膜压力传感器,其特征在于,所述承载层、所述导线丝印层、所述绝缘丝印层和所述电极丝印层依次层叠设置;
3.如权利要求1所述的压阻薄膜压力传感器,其特征在于,所述承载层包括承托部和接头部,所述接头部自所述承托部的边缘与所述承托部连接,且所述接头部和所述承托部共平面;
4.如权利要求3所述的压阻薄膜压力传感器,其特征在于,每组所述负导线组包括负引出部,所述电极丝印层还包括多组负接线丝印,每组所述负接线丝印连接同一行中的所有所述负极结构,以使同一行的所有所述负极结构串联,每条所述负引出部与一组所述负接线丝印于所述第一通孔对应连接。
5.如权利要求1至4任一项所述的压阻薄膜压力传感器,其特征在于,所述电极对中所述正极结构和所述负极结构之间的间距不大于50mm。
6.如权利要求1至4任一项所述的压阻薄膜压力传感器,其特征在于,所述承载层包括聚对苯二甲酸乙二醇酯层、聚碳酸酯层、聚酰亚胺层中的至少一层;
7.如权利要求1至4任一项所述的压阻薄膜压力传感器,其特征在于,所述压阻薄膜压力传感器还包括导电丝印层,所述导电丝印层丝印于所述压阻膜层背对所述承载层的表面。
8.如权利要求7所述的压阻薄膜压力传感器,其特征在于,所述导电丝印层包括多个且成多行多列间隔分布,每个所述导电丝印层与一个所述电极对对应。
9.一种机械臂或者机器人,其特征在于,所述机械臂或者所述机器人包括权利要求1至8任一项所述的压阻薄膜压力传感器。
10.一种运动器材,其特征在于,所述运动器材包括智能拳击手套、智能拳靶中的任一种,所述运动器材包括权利要求1至8任一项所述的压阻薄膜压力传感器。
技术总结
本技术提供一种压阻薄膜压力传感器、机械臂或机器人、运动器材。所述压阻薄膜压力传感器包括层叠设置的电极层和压阻膜层,电极层包括承载层、包括多组正导线组和多组负导线组的导线丝印层、包括成多行多列且间隔排布的多个电极对的电极丝印层、及设有若干第一通孔和第二通孔的绝缘丝印层;承载层和绝缘丝印层层叠设置,导线丝印层和电极丝印层分设于绝缘丝印层的相对两表面;每个电极对包括间隔设置的正极结构和负极结构;每组负导线组于第一通孔与负极结构连通以串联同一行的负极结构;每组正导线组于第二通孔与正极结构连通以串联同一列的正极结构;压阻膜层遮盖绝缘丝印层。该压阻薄膜压力传感器可有效检测曲面的受压大小和受压部位。
技术研发人员:丘继亮
受保护的技术使用者:墨现科技(东莞)有限公司
技术研发日:20220927
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!