1.本实用新型涉及一种码盘式编码器。
背景技术:2.编码器是将信号或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。编码器的码盘上设置有一个零位,编码器每旋转一周发一个脉冲,称之为零位脉冲或标识脉冲(即z相信号),零位脉冲用于决定零位置或标识位置。码盘是一种测量角位移的数字编码器。它具有分辨能力强、测量精度高和工作可靠等优点,是测量轴转角位置的一种最常用的位移传感器。码盘包括增量编码器两种,后者利用计算系统将旋转码盘产生的脉冲增量针对某个基准数进行加减以求得角位移。
3.现有技术中码盘上通常只设有一个零位,也就是说码盘旋转一周再次到达零位时才能判定当前码盘的角度位置。因此编码器的信号误差便是整个编码器旋转一周的角度,然而编码器零位只能输出一种信号,若是直接设置多个零位便会导致系统无法判断该零位的具体位置,依然存在较大的误差。
技术实现要素:4.本实用新型的目的是提供一种码盘式编码器,以降低误差提高精度。
5.为解决上述技术问题,本实用新型提供的技术方案为:
6.一种码盘式编码器,包括盘体,所述盘体的周向布置有多个零位,任意一组相邻零位之间的角度间距与任意另一组相邻零位之间的角度间距相异。
7.上述方案中,当编码器匀速转动时,由于相邻零位之间的角度间距不同,也就会导致转过两个零位之间的时间存在差异,可以通过判断连续的两个零位信号之间的时间差来对应经过的零位。确定了当前所在的零位也就能判断当前码盘所在的角度,因此本申请中编码器的最大误差为相邻零位之间的最大角度差,而非原有的编码器旋转一周对应的角度。
8.作为优选,所述盘体上相邻零位之间的角度间距按照顺时针或逆时针方向依次增大。
9.作为优选,所述盘体上相邻零位之间的角度间距按照顺时针或逆时针方向按照等差数列排布。
10.作为优选,所述盘体上沿圆周方向将360
°
均匀划分为27格,所述零位设置有六个,分别位于第1格、第3格、第6格、第10格、第15格、第21格。
11.作为优选,所述盘体上沿圆周方向将360
°
均匀划分为28格,所述零位设置有七个,分别位于第1格、第2格、第4格、第7格、第11格、第16格、第22格。
12.作为优选,各零位的输出信号相同,所述零位之间的区域无信号发出。
附图说明
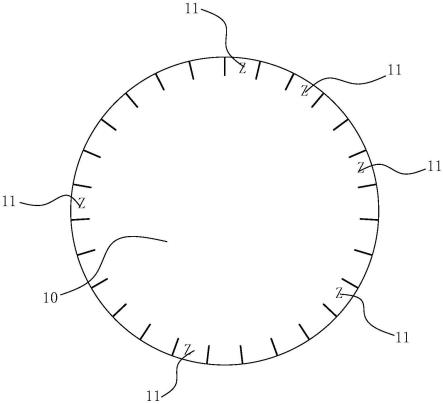
13.图1为本实用新型实施例一的结构示意图;
14.图2为本实用新型实施例二的结构示意图;
15.附图标记说明:10、盘体;11、零位。
具体实施方式
16.为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施例做详细的说明。
17.在本实用新型的描述中,需要说明的是,术语“底部”、“外壁”、“前后”等指示的方位或位置关系为基于使用状态的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
18.一种码盘式编码器,包括盘体10,所述盘体10的周向布置有多个零位11,任意一组相邻零位11之间的角度间距与任意另一组相邻零位11之间的角度间距相异。
19.上述方案中,当编码器匀速转动时,由于相邻零位11之间的角度间距不同,也就会导致转过两个零位11之间的时间存在差异,可以通过判断连续的两个零位11信号之间的时间差来对应经过的零位11。确定了当前所在的零位11也就能判断当前码盘所在的角度,因此本申请中编码器的最大误差为相邻零位11之间的最大角度差,而非原有的编码器旋转一周对应的角度。当编码器转速不均匀时,可以通过在匀速转动时编码器获取的对应零位11信息进行依次计数判断码盘所在的角度。
20.作为优选,所述盘体10上相邻零位11之间的角度间距按照顺时针或逆时针方向依次增大。这样编码器旋转时还可以通过判断连续的两个零位11信号之间的时间差逐渐增大还是逐渐减小来判断编码器的旋转方向。
21.作为优选,所述盘体10上相邻零位11之间的角度间距按照顺时针或逆时针方向按照等差数列排布。码盘所在的角度可以在保证间距存在差异的同时降低相邻零位11之间的最大角度间距,本申请中编码器的最大误差为相邻零位11之间的最大角度差,因此可以降低误差。
22.实施例一,所述盘体10上沿圆周方向将360
°
均匀划分为27格,所述零位11设置有六个,分别位于第1格、第3格、第6格、第10格、第15格、第21格。这样相邻零位11之间的角度距离差依次为1格、2格、3格、4格、5格、6格,这样便于计数。
23.实施例二,所述盘体10上沿圆周方向将360
°
均匀划分为28格,所述零位11设置有七个,分别位于第1格、第2格、第4格、第7格、第11格、第16格、第22格。这样相邻零位11之间的角度距离差依次为0格、1格、2格、3格、4格、5格、6格。这样当连续接收到两个零位11信号时便能判定,当前盘体10转动至第一或第二个零位11
24.作为优选,各零位11的输出信号相同,所述零位11之间的区域无信号发出。避免增加多余的信号提升系统整体复杂度。
25.虽然本申请公开披露如上,但本申请公开的保护范围并非仅限于此。本领域技术人员,在不脱离本申请公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本实用新型的保护范围。
技术特征:1.一种码盘式编码器,包括盘体(10),其特征在于:所述盘体(10)的周向布置有多个零位(11),任意一组相邻零位(11)之间的角度间距与任意另一组相邻零位(11)之间的角度间距相异。2.根据权利要求1所述的码盘式编码器,其特征在于:所述盘体(10)上相邻零位(11)之间的角度间距按照顺时针或逆时针方向依次增大。3.根据权利要求2所述的码盘式编码器,其特征在于:所述盘体(10)上相邻零位(11)之间的角度间距按照顺时针或逆时针方向按照等差数列排布。4.根据权利要求3所述的码盘式编码器,其特征在于:所述盘体(10)上沿圆周方向将360
°
均匀划分为27格,所述零位(11)设置有六个,分别位于第1格、第3格、第6格、第10格、第15格、第21格。5.根据权利要求3所述的码盘式编码器,其特征在于:所述盘体(10)上沿圆周方向将360
°
均匀划分为28格,所述零位(11)设置有七个,分别位于第1格、第2格、第4格、第7格、第11格、第16格、第22格。6.根据权利要求1或2或3或4或5所述的码盘式编码器,其特征在于:各零位(11)的输出信号相同,所述零位(11)之间的区域无信号发出。
技术总结本实用新型提供了一种码盘式编码器,包括盘体,所述盘体的周向布置有多个零位,任意一组相邻零位之间的角度间距与任意另一组相邻零位之间的角度间距相异。上述方案中,当编码器匀速转动时,由于相邻零位之间的角度间距不同,也就会导致转过两个零位之间的时间存在差异,可以通过判断连续的两个零位信号之间的时间差来对应经过的零位。确定了当前所在的零位也就能判断当前码盘所在的角度,因此本申请中编码器的最大误差为相邻零位之间的最大角度差,而非原有的编码器旋转一周对应的角度。而非原有的编码器旋转一周对应的角度。而非原有的编码器旋转一周对应的角度。
技术研发人员:沈之远 王廷周 陈晓科
受保护的技术使用者:宁波宏大纺织仪器有限公司
技术研发日:2022.10.10
技术公布日:2023/1/31