一种四联安瓿瓶拉断力测试机构的制作方法
本技术涉及医疗用品测试,特别涉及一种四联安瓿瓶拉断力测试机构。
背景技术:
1、安瓿瓶一般指安瓿,是指一种可熔封的硬质玻璃容器,常用于存放注射用的药物以及疫苗、血清等,是十分常见的医疗用品之一,在生产时需要对安瓿瓶的拉断力和扭断力进行测试,以确保安瓿瓶在使用时可以正常进行使用。
2、现有的安瓿瓶测试装置在使用时存在以下弊端:传统的安瓿瓶测试过程中,需要人工在很多环节进行介入辅助,导致传统的测试装置测试效率低,人工劳动量大,同时人工参与量大容易产生部分操作失误,影响测量准确性,为此,我们提出一种四联安瓿瓶拉断力测试机构。
技术实现思路
1、本实用新型的主要目的在于提供一种四联安瓿瓶拉断力测试机构,通过弹夹上料装置、夹紧气缸、拉力传感器、电动摆缸、扭力传感器等组件的相互配合,能实现安瓿瓶测试过程中的高度自动化作业,减少人工劳动量,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
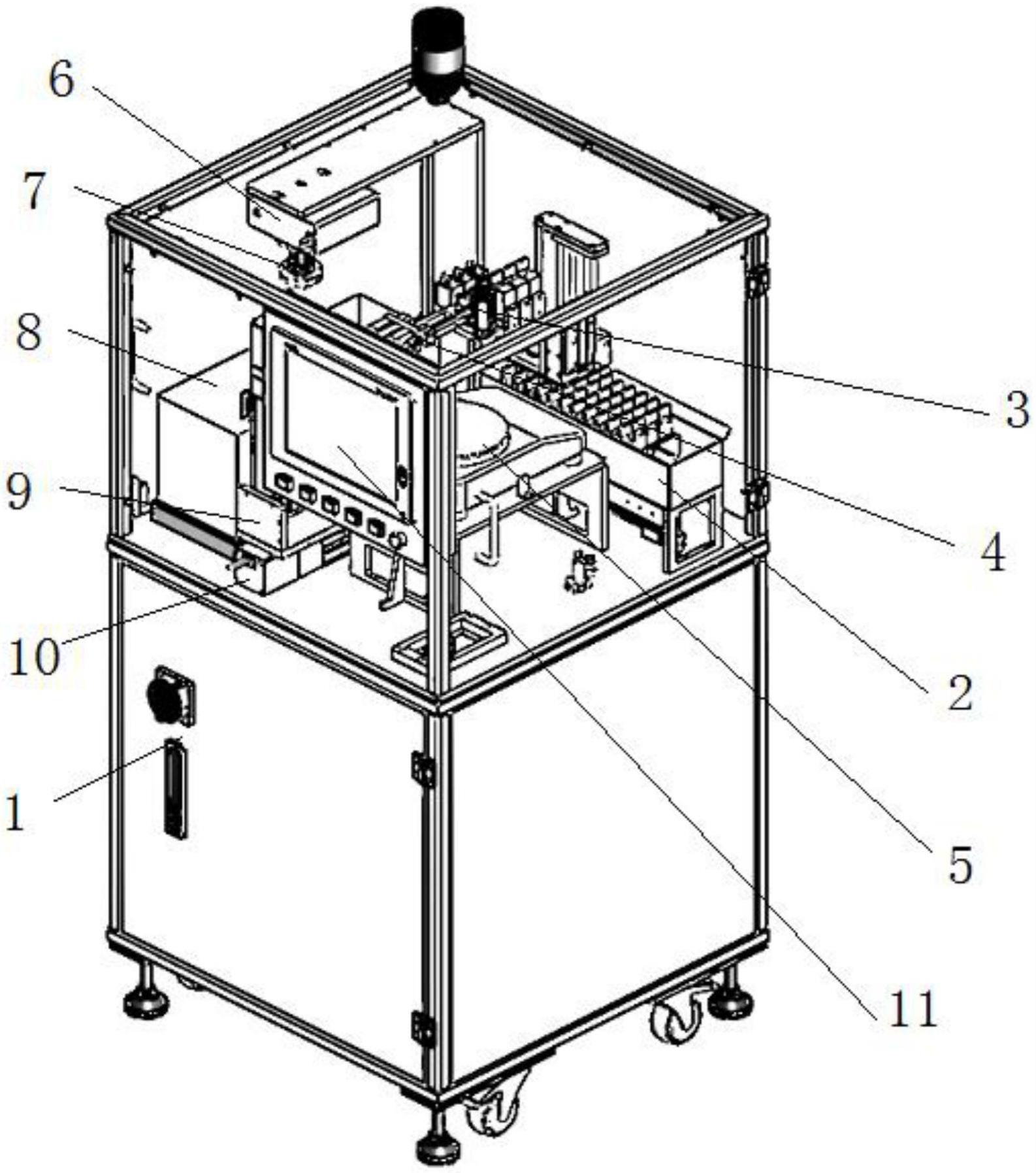
3、一种四联安瓿瓶拉断力测试机构,包括电箱,所述电箱顶部一侧设置有摆放待测安瓿瓶的弹夹上料装置,电箱顶部一侧设置有夹紧气缸且夹紧气缸动力输出端安装有拉力传感器,电箱外表面中间位置设置有对安瓿瓶进行称重的电子天平,电箱顶部靠近废料仓位置设置有电动摆缸且电动摆缸动力端安装有扭力传感器,电箱顶部靠近电子天平一侧安装有上下电缸和前后电缸。
4、进一步地,所述夹紧气缸动力输出端位于弹夹上料装置顶部;确保夹紧气缸运行时可以方便将摆放完成的安瓿瓶夹持固定住。
5、进一步地,所述上下电缸表面一侧安装有三位摆台;三位摆台运行时可以带动安瓿瓶移动调整其放置位置。
6、进一步地,所述电箱顶部一侧安装有一体工控机,所述拉力传感器、电子天平和扭力传感器信号输出端均与一体工控机信号输入端相连接;通过一体工控机显示测试组件各测试参数,并可对各组件运行进行集中调控。
7、与现有技术相比,本实用新型具有如下有益效果:电箱内部安装有为测试作业提供动力和电力的各组件,弹夹上料装置内部用来摆放四联药瓶,运行时夹紧气缸将摆放在特定位置的安瓿瓶夹起,随后上下电缸和前后电缸运行将安瓿瓶向外拉动直至分离,这一过程中拉力传感器监测拉力数据显示并储存在一体工控机内部,三位摆台运动可以带动安瓿瓶角度调整,将其放置至电子天平上,电子天平进行测量后将测得数据显示并储存在一体工控机内部,测试完成后三位摆台运行调整安瓿瓶至废料仓顶部,电动摆缸动力端夹持安瓿瓶顶端部,随后电动摆缸转动将安瓿瓶扭开,这一过程中扭力传感器进行数据记录后将数据显示并储存在一体工控机内部,通过各组件的相互配合以及一体工控机内部软件,将测得的拉断力及扭断力分别记录在表格内,同时在表格内筛选出最大值及最小值,并计算出平均值,操作员只需将抽检样品放入至上料机构内即可,有效减少人力输出,同时能避免人为原因产生的失误,同时节省测量的空间和时间。
技术特征:
1.一种四联安瓿瓶拉断力测试机构,包括电箱(1),其特征在于,所述电箱(1)顶部一侧设置有摆放待测安瓿瓶的弹夹上料装置(2),电箱(1)顶部一侧设置有夹紧气缸(3)且夹紧气缸(3)动力输出端安装有拉力传感器(4),电箱(1)外表面中间位置设置有对安瓿瓶进行称重的电子天平(5),电箱(1)顶部靠近废料仓(8)位置设置有电动摆缸(6)且电动摆缸(6)动力端安装有扭力传感器(7),电箱(1)顶部靠近电子天平(5)一侧安装有上下电缸(9)和前后电缸(10)。
2.根据权利要求1所述的一种四联安瓿瓶拉断力测试机构,其特征在于:所述夹紧气缸(3)动力输出端位于弹夹上料装置(2)顶部。
3.根据权利要求1所述的一种四联安瓿瓶拉断力测试机构,其特征在于:所述上下电缸(9)表面一侧安装有三位摆台(12)。
4.根据权利要求1所述的一种四联安瓿瓶拉断力测试机构,其特征在于:所述电箱(1)顶部一侧安装有一体工控机(11),所述拉力传感器(4)、电子天平(5)和扭力传感器(7)信号输出端均与一体工控机(11)信号输入端相连接。
技术总结
本技术公开了一种四联安瓿瓶拉断力测试机构,包括电箱,所述电箱顶部一侧设置有摆放待测安瓿瓶的弹夹上料装置,电箱顶部一侧设置有夹紧气缸且夹紧气缸动力输出端安装有拉力传感器,电箱外表面中间位置设置有对安瓿瓶进行称重的电子天平,电箱顶部靠近废料仓位置设置有电动摆缸且电动摆缸动力端安装有扭力传感器,电箱顶部靠近电子天平一侧安装有上下电缸和前后电缸,通过各组件的相互配合以及一体工控机内部软件,将测得的拉断力及扭断力分别记录在表格内,同时在表格内筛选出最大值及最小值,并计算出平均值,操作员只需将抽检样品放入至上料机构内即可,有效减少人力输出,同时能避免人为原因产生的失误,同时节省测量的空间和时间。
技术研发人员:刘伟
受保护的技术使用者:天津精创科技有限公司
技术研发日:20221020
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!