一种基于农田机器人的多传感器感知平台
本技术属于农业装备智能化领域,具体地,涉及一种基于农业机器人的多传感器感知平台,可灵活搭载于不同的农业机器人上对环境进行感知和识别,为机器人的运行提供判断条件,同时为智慧农业决策者提供决策依据。
背景技术:
1、农业机器人是智能农业装备领域的重要分支,其代替人工作业成为现代农业发展的重要趋势,而农业机器人的农田环境感知能力是智慧决策、智能控制和精准作业的重要保障。
2、对于大田农业机器人,主要通过全球卫星导航系统和惯性导航系统进行导航和定位,同时使用视觉传感器进行特征提取辅助导航,并对农田环境中的信息进行采集,为土地平整、农情巡检和作物表型提供数据依据,从而为农田管理做出精准决策依据。激光雷达能够提供精准的三维距离信息,且随着成本降低及相关技术的成熟,其逐渐成为弥补其他环境感知传感器的重要手段。
3、但是因为没有成熟的包含激光雷达在内的多传感器感知平台,使农田环境感知的技术和智能装备的发展受到限制。
技术实现思路
1、针对上述技术问题,本实用新型的目的是提供一种结构简单、安装方便、使用灵活的基于农业机器人的多传感器感知平台,可通用于中小型农田机器人。本实用新型在不遮挡相机和激光雷达检测视角的基础上,以传感器连接孔为参考,将二者连接板设计为角度可调式,可根据机器人高度和检测内容进行角度调节,以充分发挥传感器性能。本实用新型结构强度可靠,可以承受农田环境的颠簸或振动外载,实现农田环境的长时间可靠工作。
2、为了实现上述目的,本实用新型提供了如下技术方案:
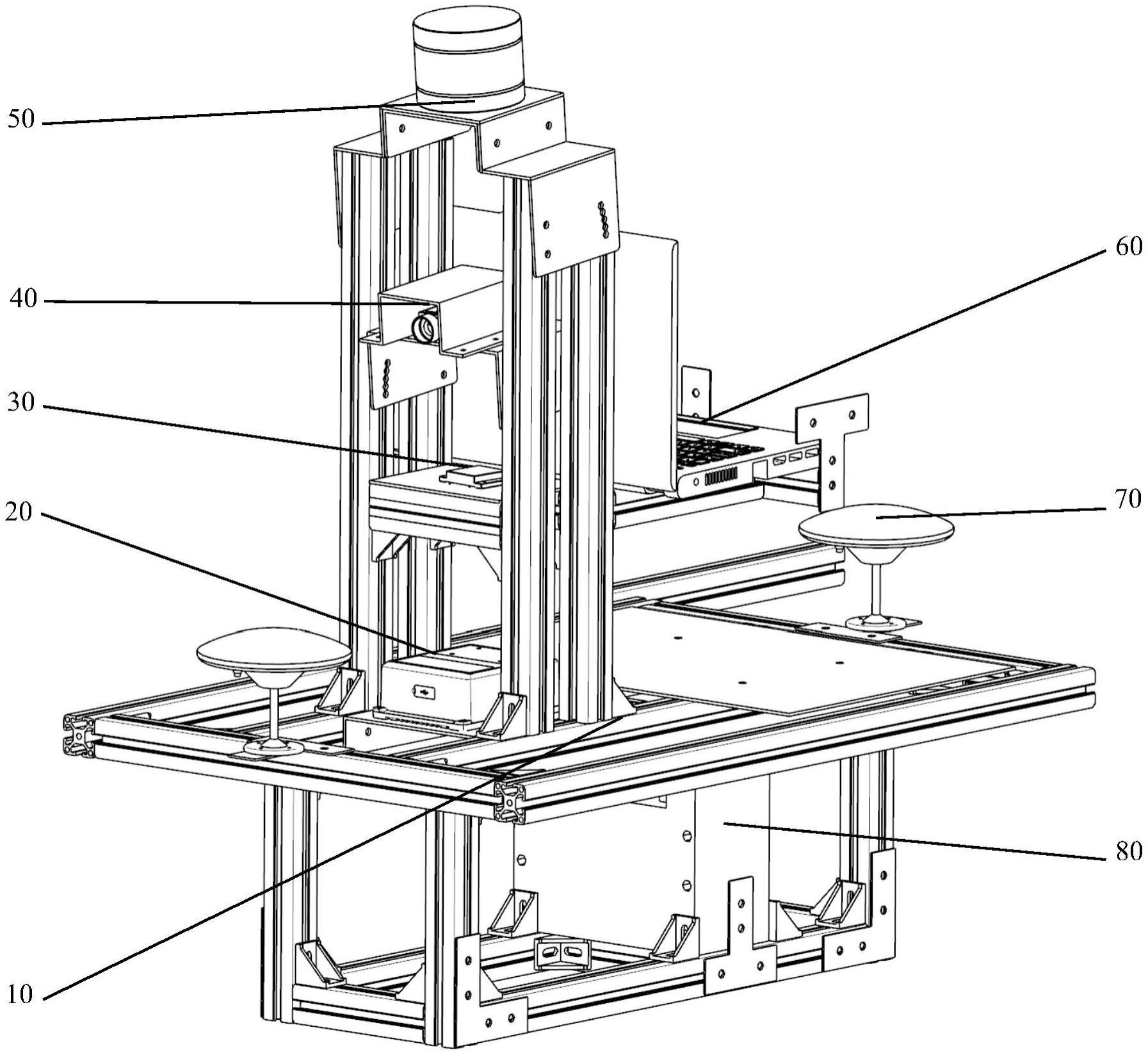
3、一种基于农田机器人的多传感器感知平台,包括平台支架10、组合导航接收机20、惯性传感器30、相机及安装组件40、激光雷达及安装组件50、工控机60、卫星信号接收天线70和总电源80。
4、所述平台支架10包括支撑柱11、横梁12、接收机安装架13、惯性传感器安装架14、立柱15、工控机栏板16、线缆放置板17、纵梁18和电池栏板19;其中,两个横梁12和两个纵梁18相互固接构成一水平框架;所述接收机安装架13和线缆放置板17分别设置在所述水平框架上表面的前部和后部,所述惯性传感器安装架14通过立柱15高度可调地设置在接收机安装架13的上方,所述工控机栏板16固接在惯性传感器安装架14的后端;所述水平框架的底面固接有四个支撑柱11;所述电池栏板19固接在支撑柱11上。
5、所述组合导航接收机20安装在接收机安装架13上;所述惯性传感器30安装在惯性传感器安装架14上;所述工控机60安装在工控机栏板16上;所述卫星信号接收天线70安装在所述水平框架的后端;所述总电源80安装在电池栏板19上。
6、所述相机及安装组件40包括相机连接板41和工业相机43;所述工业相机43通过相机连接板41拍摄角度及拍摄高度可调地安装在立柱15上,位于惯性传感器安装架14的上方。
7、所述激光雷达及安装组件50包括阻挡板51、雷达连接板52、定位销53和激光雷达54。
8、所述激光雷达54通过雷达连接板52检测角度及检测高度可调地安装在立柱15上,位于工业相机43的上方;所述激光雷达54通过定位销53和阻挡板51固接在雷达连接板52上。
9、工控机60、激光雷达54、工业相机43、组合导航接收机20和惯性传感器30总电源80供电。
10、激光雷达54、工业相机43、组合导航接收机20和惯性传感器30与工控机60连接通信;工控机60、激光雷达54、工业相机43、组合导航接收机20和惯性传感器30的线缆,经整理后放置于线缆放置板17。
11、所述工业相机43的上方设有遮蔽工业相机43的镜头42的遮光罩44,遮光罩44可拆卸可直线移动调整地固接在相机连接板41上。
12、所述工业相机43的拍摄角度的调节范围为0~20°。
13、所述激光雷达54的检测角度的调节范围为0~20°。
14、工控机60通过24v转220v逆变器与总电源80连接;激光雷达54、工业相机43和组合导航接收机20均通过24v转12v直流降压器与总电源80连接;惯性传感器30通过12v转5v直流降压器与总电源80连接。
15、激光雷达54通过百兆以太网与工控机60连接通信;工业相机43通过千兆以太网与工控机60连接通信;组合导航接收机20和惯性传感器30均通过rs232串行通信接口与工控机60连接通信。
16、与现有技术相比,本实用新型的有益效果在于:
17、(1)传感器数据丰富且互补,能够对环境进行很好的感知和识别。
18、(2)激光雷达和相机的安装角度可调,能够针对不同农田机器人或场景条件调节视角内中心位置。
19、(3)各传感器间相对位置容易测量,可以较简单的实现传感器外参标定。
20、(4)平台所有电气设备统一于总电源,避免搭载多块电源。
21、(5)本平台结构简单、加工方便、安装快捷、成本低廉。
22、(6)结构紧凑,通用性强,能够用于中小型农田机器人。
23、(7)可拓展性强,能够在此基础上安装其他传感器。
技术特征:
1.一种基于农田机器人的多传感器感知平台,其特征在于,所述多传感器感知平台包括平台支架(10)、组合导航接收机(20)、惯性传感器(30)、相机及安装组件(40)、激光雷达及安装组件(50)、工控机(60)、卫星信号接收天线(70)和总电源(80);
2.根据权利要求1所述的基于农田机器人的多传感器感知平台,其特征在于,所述工业相机(43)的上方设有遮蔽工业相机(43)的镜头(42)的遮光罩(44),遮光罩(44)可拆卸可直线移动调整地固接在相机连接板(41)上。
3.根据权利要求1所述的基于农田机器人的多传感器感知平台,其特征在于,所述工业相机(43)的拍摄角度的调节范围为0~20°。
4.根据权利要求1所述的基于农田机器人的多传感器感知平台,其特征在于,所述激光雷达(54)的检测角度的调节范围为0~20°。
5.根据权利要求1所述的基于农田机器人的多传感器感知平台,其特征在于,工控机(60)通过24v转220v逆变器与总电源(80)连接;激光雷达(54)、工业相机(43)和组合导航接收机(20)均通过24v转12v直流降压器与总电源(80)连接;惯性传感器(30)通过12v转5v直流降压器与总电源(80)连接。
6.根据权利要求1所述的基于农田机器人的多传感器感知平台,其特征在于,激光雷达(54)通过百兆以太网与工控机(60)连接通信;工业相机(43)通过千兆以太网与工控机(60)连接通信;组合导航接收机(20)和惯性传感器(30)均通过rs232串行通信接口与工控机(60)连接通信。
技术总结
本技术涉及一种基于农田机器人的多传感器感知平台,包括平台支架、组合导航接收机、惯性传感器、相机及安装组件、激光雷达及安装组件、工控机、卫星信号接收天线和总电源;组合导航接收机安装在接收机安装架上;惯性传感器安装在惯性传感器安装架上;工控机安装在工控机栏板上;卫星信号接收天线安装在所述水平框架的后端;总电源安装在电池栏板上;工业相机通过相机连接板拍摄角度及拍摄高度可调地安装在立柱上;激光雷达通过雷达连接板检测角度及检测高度可调地安装在立柱上。本技术结构简单、安装方便、使用灵活。
技术研发人员:迟瑞娟,班超,苏童,黄修炼,马悦琦,董乃希,姜龙腾,朱晓龙
受保护的技术使用者:中国农业大学
技术研发日:20221202
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!