一种水下机器人用取样设备的制作方法
本技术涉及水下机器人,具体是一种水下机器人用取样设备。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。
2、在进行水下取样作业时,现有技术中,一般采用电控取样器,由于取样管较小,导致电控取样器成本较高且容易损坏。
技术实现思路
1、本实用新型的目的在于提供一种水下机器人用取样设备,以解决现有取样器成本高且容易损坏的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种水下机器人用取样设备,包括,机架,所述机架的两侧均设置有至少一组取样机构;所述取样机构包括大致呈筒状的取样管、用于开启或截止所述取样管的控制组件,所述控制组件包括至少一公拼接端、至少一母拼接端、用以驱动所述公拼接端及所述母拼接端滑动的动力组件;
4、其中,所述取样管内设置有供所述公拼接端及所述母拼接端滑动的滑槽,所述取样管内设置有用以储存样品的存储空间。
5、与现有技术相比,本实用新型的有益效果是:拼接端与母拼接端拼接形成封闭结构,用以截止取样管,公拼接端与母拼接端分开时,取样管开启并开始取样,公拼接端或母拼接端可以为一个,也可以为多个,优选的,公拼接端或母拼接端只有一个,动力组件可以设置在取样管内也可以设置在取样管外,此处对其不做限制,通过可滑动的公拼接端与母拼接端来达到开启或截止取样管,制造成本底且不易损坏。
6、优选地,所述动力组件包括与所述存储空间联通的分通道,所述分通道设置有压力膜,所述压力膜与所述公拼接端和/或所述母拼接端之间设置有牵拉绳,所述公拼接端及所述母拼接端具有磁性。
7、优选地,所述母拼接端设置有一组卡齿,所述公拼接端设置有与所述卡齿相对应的卡槽。
8、优选地,所述滑槽沿所述取样管的径向布置有一组弹性块,所述公拼接端和/或所述母拼接端设置有与所述弹性块相适配的密封槽。
9、优选地,所述公拼接端和/或所述母拼接端设置有电磁铁,所述机架设置有电控箱,所述电磁铁与所述电控箱电连接。
10、优选地,所述机架设置有至少一组竖向布置的升降驱动机构、至少一水平布置的水平驱动机构,所述升降驱动机构和/或所述水平驱动机构包括至少一动力源、连接于所述动力源输出端的叶片,所述动力源与所述电控箱电连接。
技术特征:
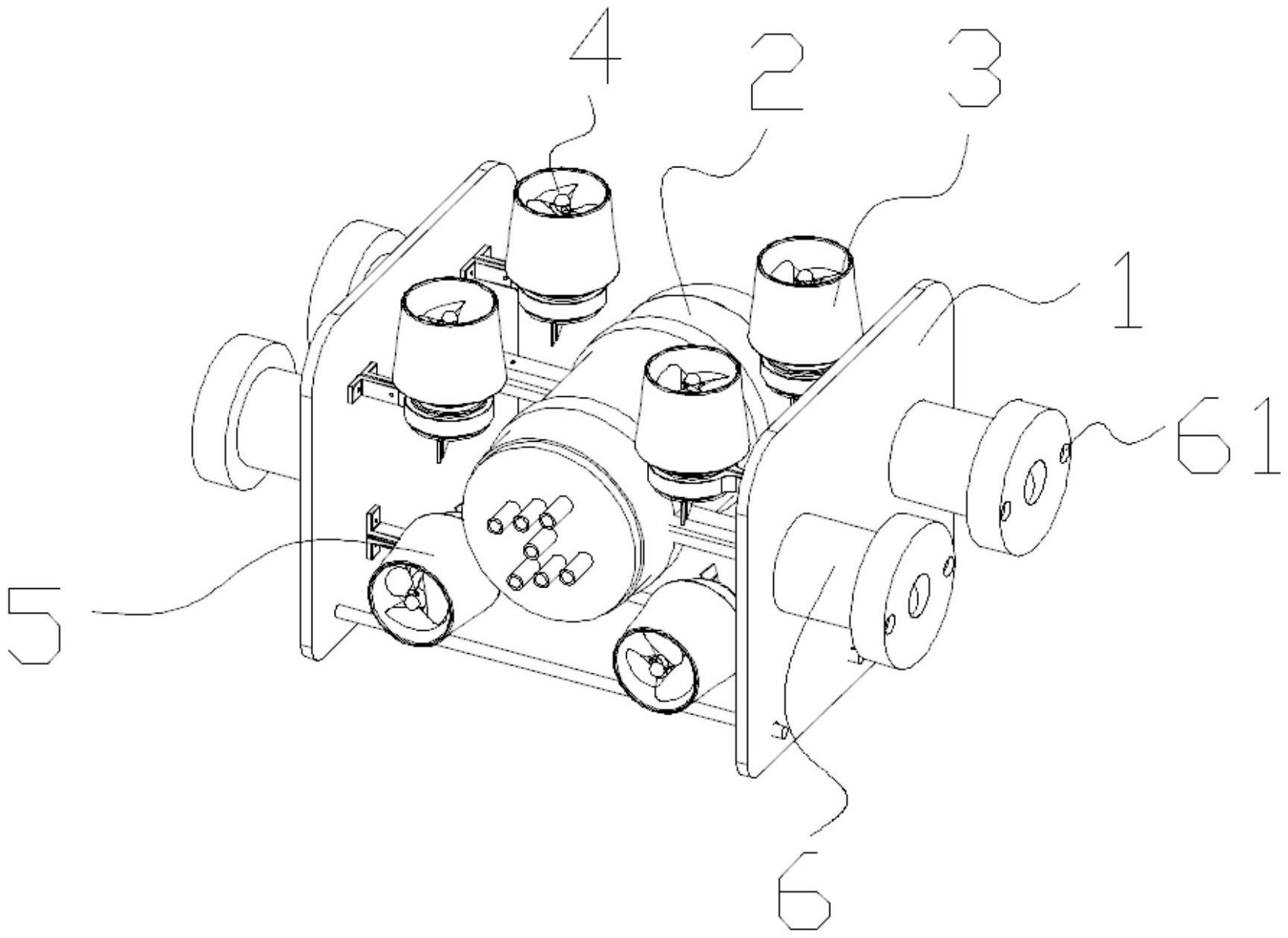
1.一种水下机器人用取样设备,其特征在于,包括,机架(1),所述机架(1)的两侧均设置有至少一组取样机构;
2.根据权利要求1所述的一种水下机器人用取样设备,其特征在于,所述动力组件包括与所述存储空间联通的分通道(61),所述分通道(61)设置有压力膜(62),所述压力膜(62)与所述公拼接端(63)和/或所述母拼接端(64)之间设置有牵拉绳,所述公拼接端(63)及所述母拼接端(64)具有磁性。
3.根据权利要求2所述的一种水下机器人用取样设备,其特征在于,所述母拼接端(64)设置有一组卡齿,所述公拼接端(63)设置有与所述卡齿相对应的卡槽。
4.根据权利要求2所述的一种水下机器人用取样设备,其特征在于,所述滑槽(65)沿所述取样管(6)的径向布置有一组弹性块,所述公拼接端(63)和/或所述母拼接端(64)设置有与所述弹性块相适配的密封槽。
5.根据权利要求2所述的一种水下机器人用取样设备,其特征在于,所述公拼接端(63)和/或所述母拼接端(64)设置有电磁铁,所述机架(1)设置有电控箱(2),所述电磁铁与所述电控箱(2)电连接。
6.根据权利要求5所述的一种水下机器人用取样设备,其特征在于,所述机架(1)设置有至少一组竖向布置的升降驱动机构(3)、至少一水平布置的水平驱动机构(5),所述升降驱动机构(3)和/或所述水平驱动机构(5)包括至少一动力源、连接于所述动力源输出端的叶片(4),所述动力源与所述电控箱(2)电连接。
技术总结
本技术涉及水下机器人技术领域,具体是一种水下机器人用取样设备,包括,机架,所述机架的两侧均设置有至少一组取样机构;所述取样机构包括大致呈筒状的取样管、用于开启或截止所述取样管的控制组件,所述控制组件包括至少一公拼接端、至少一母拼接端、用以驱动所述公拼接端及所述母拼接端滑动的动力组件;其中,所述取样管内设置有供所述公拼接端及所述母拼接端滑动的滑槽,所述取样管内设置有用以储存样品的存储空间。与现有技术相比,本技术的有益效果是:拼接端与母拼接端拼接形成封闭结构,用以截止取样管,通过可滑动的公拼接端与母拼接端来达到开启或截止取样管,制造成本低且不易损坏。
技术研发人员:肖立群,孟凡诚
受保护的技术使用者:鲸天下智能科技(常州)有限公司
技术研发日:20221228
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!