用于组装的结构中的系统识别的受控阻塞力激励器的制作方法
背景技术:
1、为了在例如范围从车辆(例如乘用车)到真空吸尘器和各种其它产品的众多产品中实现卓越的噪声振动和声振粗糙度(“nvh”)质量,使用各种工程技术和工具对完全组装的结构中的结构噪声执行诊断和预测。传递路径分析(“tpa”)是一种技术的示例。tpa的一个优点是,复杂结构可以被分解成离散的源激励(负载)和传递路径。此分解促进:对噪声和振动源进行等级排序;对所引起的振动向所连接的接收器的传输进行研究;以及其它分析。因此,tpa是一种尤其在汽车行业中被广泛使用的nvh工程工具。
2、不过tpa的确具有局限性。由于固有的劳动密集型逆算法(inverse approach)所致,传统tpa应用起来是耗时的,所述固有的劳动密集型逆算法需要源被移除以便于诸如频率响应函数(“frf”)的系统响应函数(srf)测量且然后被重装以便于组件上的操作测量。此外,源与接收器解除联接会在tpa模型中引起误差。由于传统tpa通过接触力来表征振动部件,因此来自振动部件的数据仅恰好对源-接收器组件(该数据在源-接收器组件中被获取)有效。对于从车辆远程地开发部件而言,此信息的用途有限。
3、近年来,原位阻塞力(blocked force,约束力)方法已成为用于独立表征结构声源的一种有前途的手段。调用矩阵求逆来间接测量源-接收器界面处的阻塞力,该原位阻塞力手段类似于传统tpa中使用的逆力合成。然而,主要的区别在于所有的测量都是在原位进行的。这消除了繁琐的解除联接阶段,该解除联接阶段可能导致操作的与frf测量之间的不一致。原位tpa(“itpa”)手段被发现应用起来比传统tpa快50%左右,而对可靠性具有少的影响甚至没有影响。由于阻塞力的不变特性所致,原位测量的源数据可在不同组件之间传递。这允许对在类似条件下但在不同组件(例如,台架和车辆)中操作的源进行比较,或者使用来自一个装置(例如,台架)的阻塞力来预测在不同源-接收器组合(例如车辆)中的振动或从不同源-接收器组合(例如车辆)所辐射的声音。后一种应用被称为虚拟声学原型(“vap”)。最近与汽车vap相关的研究旨在预测并感知由汽车机电系统引起的噪声,汽车机电系统诸如电动助力转向(“eps”)系统。另一研究领域集中在将原位阻塞力用于基于传递率的tpa方法。
4、原位阻塞力tpa手段的一个缺点是它们涉及耗时的系统识别和诊断步骤,这使得难以将tpa用作日常标准工程工具。例如,取决于细节级别,执行itpa以量化来自eps的转向所引起的噪声对乘用车辆整体座舱声音的影响可能耗费长达一周。虽然通过(手动)执行左/右转向来收集操作数据只需几分钟,但在所有所提及的tpa手段中所需的复杂汽车组件中所需的系统识别步骤无法以省时的方式执行。
技术实现思路
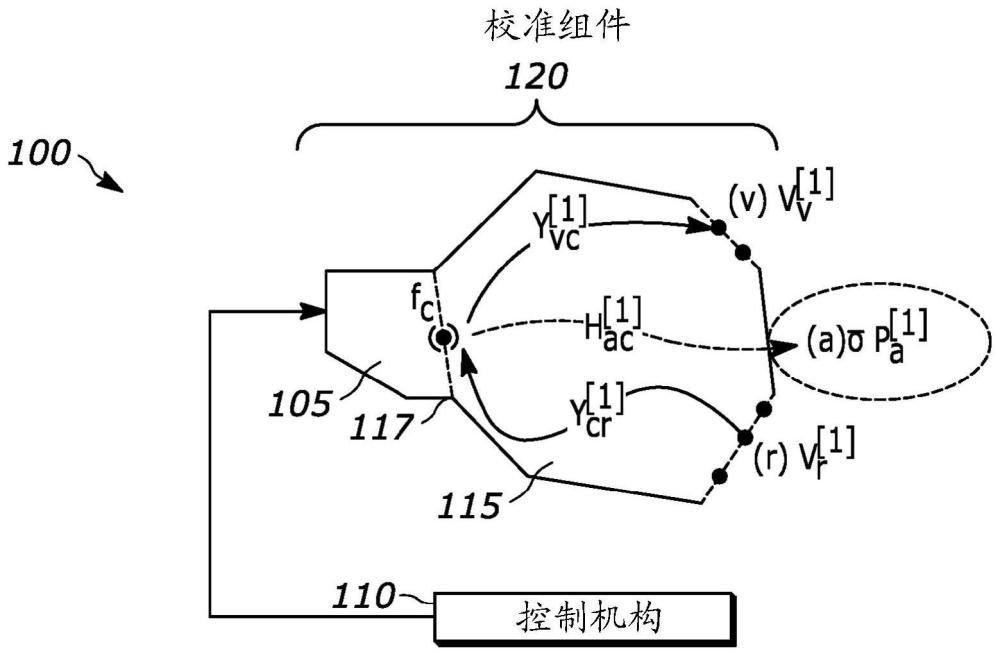
1、本公开提供一种受控阻塞力激励器系统和方法,以促进多输入多输出(“mimo”)系统识别(即,对同时进行的所有物理地相关的传递路径的识别)和诊断,即使在复杂的技术结构中也以准确和省时的方式进行。参考本文先前描述的示例,使用所公开的系统和方法来诊断转向所引起的eps噪声,通过基本上将整个振动源转变为可控的多dof(“自由度”)阻塞力振动器,在乘用车中执行itpa的总时间可以减少到仅几分钟。以此方式,阻塞力的不变性被利用以提供益处,如下文更详细描述的。
2、本公开提供一种用于原位确定系统响应函数的方法(下文将对这些系统响应函数进行详细描述)。该方法包括将受控阻塞力激励器联接到校准接收器结构。该方法还包括在成组的受控操作条件下操作受控阻塞力激励器,以从校准接收器结构生成响应数据(例如动态反作用力(例如阻塞力))和振动响应(例如位移、加速度等)。在一些实施方式中,该方法还包括在成组的受控操作条件下操作受控阻塞力激励器时测量校准接收器结构的响应数据。该方法还包括基于校准接收器结构的响应数据(例如,直接测量或使用例如矩阵求逆过程间接测量)来确定成组的阻塞力。该方法还包括将受控阻塞力激励器联接到目标接收器结构。该方法还包括在相同的成组的受控操作条件下操作受控阻塞力激励器以在目标接收器结构中引起振动。该方法还包括在相同的成组的受控操作条件下操作受控阻塞力激励器时测量目标接收器结构的响应数据。该方法还包括通过将目标接收器结构的响应数据与在校准测量期间使用的成组的阻塞力相关联来确定成组的系统响应函数。
技术特征:
1.一种用于确定系统响应函数的方法,所述方法包括:
2.根据权利要求1所述的方法,还包括:
3.根据权利要求2所述的方法,还包括:
4.根据权利要求1所述的方法,其中,所述校准接收器结构的响应数据包括所述校准接收器结构的至少一点的原位路径输入数据,并且其中,基于所述校准接收器结构的响应数据来确定所述成组的阻塞力包括:在所述成组的受控操作条件下操作所述受控阻塞力激励器时识别至少一个参数负载模型,所述参数负载模型表征作用在所述校准接收器结构上的结构和声学负载,作为通过所述校准接收器结构的所述至少一点的所述原位路径输入数据的函数。
5.根据权利要求4所述的方法,其中,所述校准接收器结构和所述目标接收器结构是相同的结构。
6.根据权利要求1所述的方法,其中,所述校准接收器结构和所述目标接收器结构是不同的结构。
7.根据权利要求1所述的方法,其中,所述校准接收器结构是刚性接收器,其中,在所述成组的受控操作条件下操作所述受控阻塞力激励器时测量所述校准接收器结构的响应数据包括:使用在联接界面处位于所述受控阻塞力激励器与所述校准接收器结构之间的成组的测压元件来测量所述成组的阻塞力。
8.根据权利要求1所述的方法,其中所述受控阻塞力激励器弹性地安装到所述校准接收器结构,其中,所述校准接收器结构的响应数据包括一个或多个自由速度测量值,其中,基于所述校准接收器结构的响应数据来确定所述成组的阻塞力包括:基于所述一个或多个自由速度测量值和联接界面处的预先确定的系统响应函数来确定所述成组的阻塞力。
9.根据权利要求1所述的方法,其中,在所述成组的受控操作条件下操作所述受控阻塞力激励器以在所述校准接收器结构中引起振动包括:在所述成组的受控操作条件下操作被包括在所述受控阻塞力激励器中的一个或多个嵌入式振动生成机构以在所述校准接收器结构中引起振动,以及
10.根据权利要求1所述的方法,还包括:在所述受控阻塞力激励器上应用一个或多个外部振动生成机构,其中,在所述成组的受控操作条件下操作所述受控阻塞力激励器以在所述校准接收器结构中引起振动包括:在所述成组的受控操作条件下操作所述一个或多个外部振动生成机构以在所述校准接收器结构中引起振动,以及
11.一种用于确定系统响应函数的系统,所述系统包括:
技术总结
用于原位确定系统响应函数的方法和系统。一种示例方法包括将受控阻塞力激励器联接到校准接收器结构。该方法还包括在受控操作条件下操作受控阻塞力激励器以在校准接收器结构中引起振动,并测量校准接收器结构的响应数据。该方法还包括基于校准接收器结构的响应数据来确定阻塞力。该方法还包括将受控阻塞力激励器联接到目标接收器结构。该方法还包括在受控操作条件下操作受控阻塞力激励器以在目标接收器结构中引起振动,并测量目标接收器结构的响应数据。该方法还包括通过将目标接收器结构的响应数据与阻塞力相关联来确定系统响应函数。
技术研发人员:A·穆尔豪斯,M·斯特鲁姆,K·维也纳,M·扬科尼斯
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!