力检测装置以及机器人的制作方法
本公开涉及力检测装置以及机器人。
背景技术:
1、以往,作为难以受到安装场所变形的影响的力检测器,已知有在力传感器主体与安装部之间设置间隙的力检测器(例如,参照专利文献1。)。即使安装力传感器的表面发生变形,应力作用于安装在该表面的安装部,力的传递路径也会因间隙而变长,能够减小因安装面的变形、起伏等产生的应力对力传感器主体的影响。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2021-41482号公报
技术实现思路
1、发明要解决的问题
2、然而,在力传感器主体与安装部之间设置间隙的情况下,用于设置间隙的缩颈会导致该部分的刚性降低,因此,在作用了大的负载时,力传感器主体会向预想外的方向变形,从而导致检测精度降低。因此,希望防止因安装的装置的负载的大变动导致的检测精度的降低。
3、用于解决问题的方案
4、一种力检测装置,具备:第一安装部,其固定于第一被安装面;第二安装部,其固定于负载变动比所述第一被安装面大的第二被安装面;以及力传感器主体,其固定于所述第一安装部与所述第二安装部之间,所述第一安装部具备:平板状或者凸缘状的第一部分,其固定于所述力传感器主体的一个端面;柱状的第二部分,其一端与该第一部分的与所述力传感器主体相反的一侧连接;以及第三部分,其设置于该第二部分的另一端,并且固定于所述第一被安装面,在所述第一部分和所述第三部分之间形成有所述第二部分的轴向的间隙,所述第二安装部形成为固定于所述力传感器主体的另一个端面且刚性比所述第三部分高的平板状。
技术特征:
1.一种力检测装置,其特征在于,具备:
2.根据权利要求1所述的力检测装置,其特征在于,
3.根据权利要求2所述的力检测装置,其特征在于,
4.根据权利要求2或3所述的力检测装置,其特征在于,
5.根据权利要求4所述的力检测装置,其特征在于,
6.一种机器人,其特征在于,具备:
7.一种机器人,其特征在于,具备:
8.根据权利要求7所述的机器人,其特征在于,
技术总结
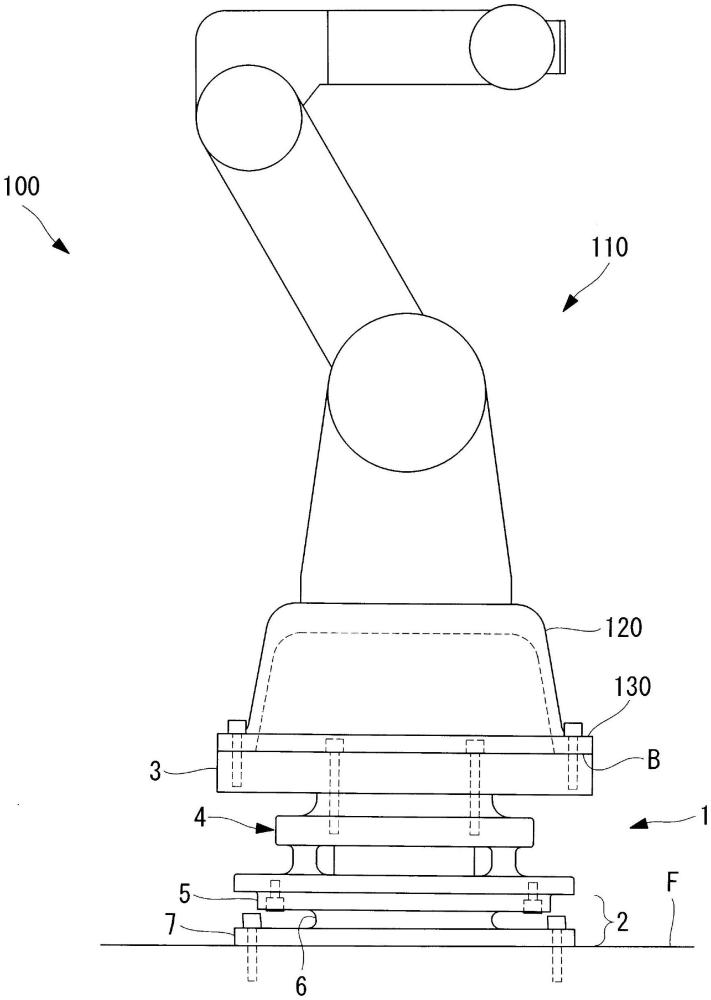
一种力检测装置(1),具备:第一安装部(2),其固定于第一被安装面(F);第二安装部(3),其固定于负载变动比第一被安装面(F)大的第二被安装面(B);以及力传感器主体(4),其固定于第一安装部(2)与第二安装部(3)之间,第一安装部(2)具备:平板状或者凸缘状的第一部分(5),其固定于力传感器主体(4)的一个端面;柱状的第二部分(6),其一端与第一部分(5)的与力传感器主体(4)相反的一侧连接;以及第三部分(7),其设置于第二部分(6)的另一端,并且固定于第一被安装面(F),在第一部分(5)与第三部分(7)之间形成有第二部分(6)的轴向的间隙,第二安装部(3)形成为固定于力传感器主体(4)的另一个端面且刚性比第三部分(7)高的平板状。
技术研发人员:东松龙英
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!