一种基于感应电动势的运动磁性目标响应计算和追踪方法
本发明属于磁探,具体涉及一种基于感应电动势的运动磁性目标响应计算和追踪方法。
背景技术:
1、陆上车辆和海面舰船等运动目标通常由铁磁性物质组成,自身铁磁性材料的剩磁和感磁构成的磁性源,其自身会产生静态磁场。静态磁场是运动目标的重要特征信号,其特征是实现磁性目标定位的基础信息。移动目标的定位方法本质上是利用目标的静态电磁场对特定时刻目标进行实时的位置反演,这种定位方法使用的数据是目标在特定时刻的磁感应强度值或梯度值,其采用的磁传感器为测量水下目标静态磁场绝对值的磁强计,如磁通门、squid等。然而,这类测量绝对场值的传感器通常造价较高,且探测灵敏度范围较窄,应用范围由此收到一定受限。此外,这种定位方法所获得的目标运动状态未考虑目标的移动速度,定位的精度与目标移动速度无关。
2、磁感应线圈是基于电磁感应法的磁场传感器,其探测灵敏度范围较于其他传感器更广,非常适用于捕获目标的微弱磁场。当一个磁感应线圈布设于预定位置时,磁性目标的运动会使得感应线圈位置处的磁通量发生变化并使得磁感应线圈产生感应电动势。目标的运动速度越大,其产生的响应越大。由此可见,目标的运动速度本身就是一个有效信息。因此,可想而知的,磁感应线圈的响应与运动目标速度成正比,因此磁感应线圈在实现运动目标的轨迹定位中有着天然的优势。然而,公开的报导中鲜有见到利用磁性目标的运动速度信息进行目标定位的算法。
技术实现思路
1、本发明的目的在于提供一种基于感应电动势的运动磁性目标响应计算和追踪方法,该方法使用的是携带速度信息的感应电动势数据,该方法可应用于实现运动磁性目标的远距离探测和追踪。
2、为了实现以上目的,本发明提供如下技术方案:
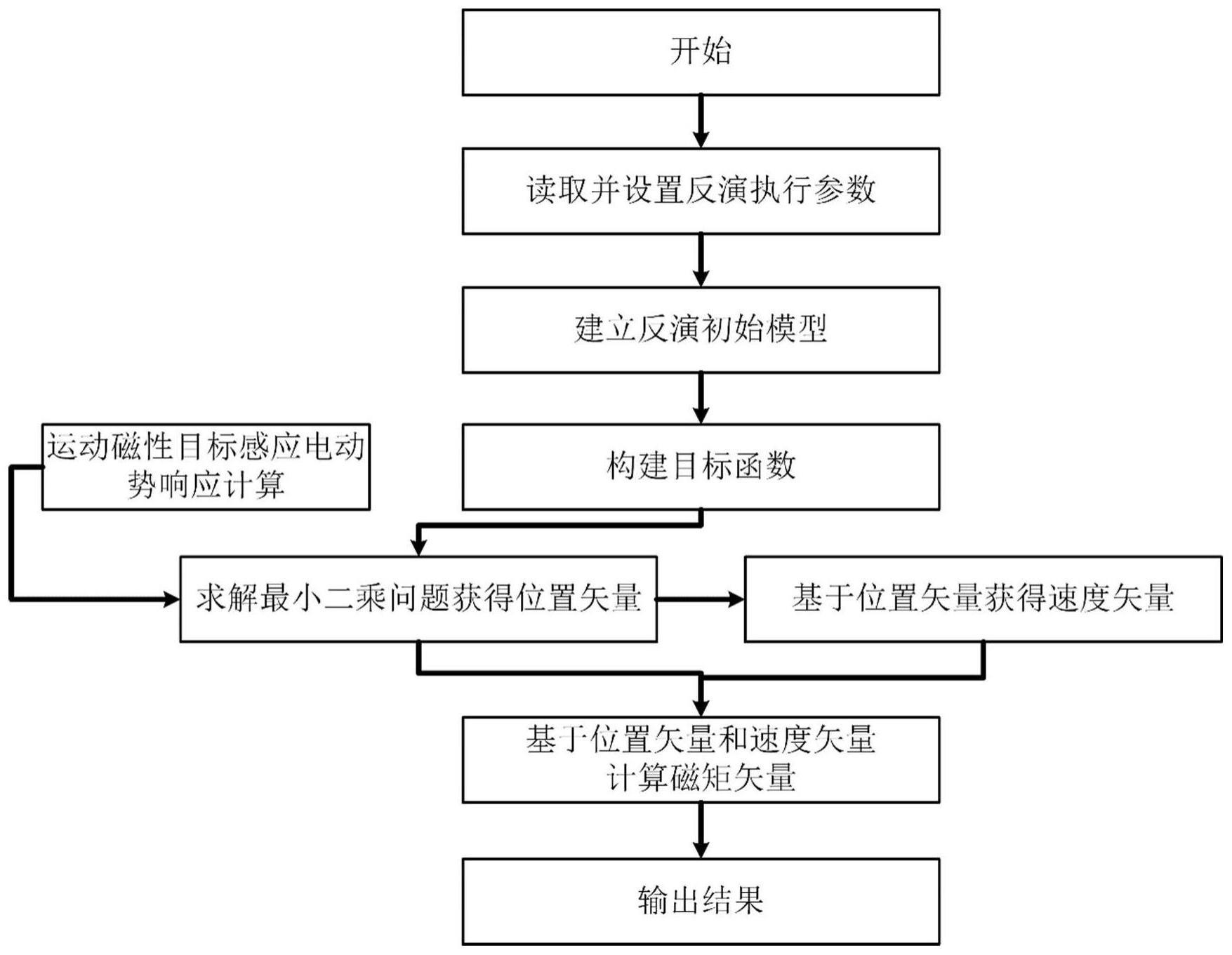
3、1.一种基于感应电动势的运动磁性目标响应计算和追踪方法,其特征在于,具体包括:
4、s1、读取参与反演的传感器阵列感应电动势数据,设置反演执行参数并设计反演初始模型;
5、s2、构建运动磁性目标追踪目标函数φ,并有以下形式
6、
7、其中,p为模型参数,其包括磁性目标体的位置矢量[x,y,z],速度矢量[vx,vy,vz]和磁矩矢量[mx,my,mz],f(p)为感应电动势正演算子,σi为第i个数据的标准差,d=[d1 d2… dn]为观测数据矢量,n为观测数的个数;
8、s3、通过求解最小二乘问题获取磁性运动目标的位置矢量;
9、s4、基于获得的位置信息计算目标的速度矢量;
10、s5、基于获得的位置信息和速度信息计算磁性目标体的磁矩矢量。
11、2.如权利要求1所述的基于感应电动势的运动磁性目标响应计算和追踪方法,其特征在于,s1中所述的传感器阵列至少由3个三分量磁感应线圈传感器组成。
12、3.如权利要求1所述的基于感应电动势的运动磁性目标响应计算和追踪方法,其特征在于,s2中所述的感应电动势正演的计算方法为
13、
14、其中,ε为感应电动势,μapp为感应线圈核心材料的相对磁导率,sn感应线圈的垂直截面积,b为平行于感应线圈的磁感应强度,t为时间,为磁性目标运动引起在传感器所在位置的磁感应强度关于时间的偏导数,在三个正交方向上的分量可表示为
15、
16、其中,[vx,vy,vz]分别为磁性目标在三个正交方向上的运动速度,为系数矩阵,其各元素有以下形式
17、
18、其中,byx=bxy,bzx=bxz,以及b为系数,具体为
19、b11=9xr2-15x3;b12=3yr2-15x2y;b13=3zr2-15x2z;
20、b22=3xr2-15xy2;b23=-15xyz;b33=3xr2-15xz2;
21、b42=9yr2-15y3;b43=3zr2-15y2z;b53=3yr2-15yz2;
22、b21=b12;b31=b13;b32=b51=b23;b41=b22;b52=b43.
23、上式中,[x,y,z]为目标和传感器之间的位置矢量,r为位置矢量[x,y,z]的模,[mx,my,mz]为运动磁性目标的磁矩矢量。
24、4.如权利要求1所述的基于感应电动势的运动磁性目标响应计算和追踪方法,其特征在于,s4中所述的基于获得的位置矢量计算目标速度矢量方法,采用多项式拟合不同时刻的速度矢量以减小因不同时刻位置突变引起的速度异常。
25、5.如权利要求1所述的基于感应电动势的运动磁性目标响应计算和追踪方法,其特征在于,s5中所述的基于获得的位置信息和速度信息计算磁性目标体的磁矩矢量,计算方法如下
26、
27、其中,为磁性目标运动引起在传感器所在位置的磁感应强度关于时间的偏导数,为系数矩阵,且有cxy=cyx和
28、
29、较现有技术相比,本发明一些实施例中,提供的方法的有益效果在于:
30、本发明主要针对运动磁性目标的远距离探测和追踪问题,提出了一种基于感应电动势的运动磁性目标响应计算和追踪方法。该方法通过构建至少由三个三分量磁感应线圈组成的传感器阵列,利用由磁性目标运动引起传感器中感生的感应电动势;通过求解最小二乘问题获得运动磁性目标体的位置矢量,再基于获得的位置矢量,利用多项式拟合获得稳定的速度矢量,最后利用位置矢量和速度矢量计算磁矩矢量。
31、本发明采用的数据为三分量磁感应线圈的感应电动势,该数据幅值与磁性目标体的运动速度成正比,相比于传统的磁感应强度数据,其本身携带运动目标的速度信息,更有利于获取准确的运动磁性目标的速度信息和位置信息。本发明为运动目标的探测和追踪提供了一种新的思路,该方法对速度的敏感性更强,更有益于获取准确的速度信息,具有实际的应用价值。
技术特征:
1.一种基于感应电动势的运动磁性目标响应计算和追踪方法,其特征在于,具体包括:
2.如权利要求1所述的基于感应电动势的运动磁性目标响应计算和追踪方法,其特征在于,s1中所述的传感器阵列至少由3个三分量磁感应线圈传感器组成。
3.如权利要求1所述的基于感应电动势的运动磁性目标响应计算和追踪方法,其特征在于,s2中所述的感应电动势正演的计算方法为
4.如权利要求1所述的基于感应电动势的运动磁性目标响应计算和追踪方法,其特征在于,s4中所述的基于获得的位置矢量计算目标速度矢量方法,采用多项式拟合不同时刻的速度矢量以减小因不同时刻位置突变引起的速度异常。
5.如权利要求1所述的基于感应电动势的运动磁性目标响应计算和追踪方法,其特征在于,s5中所述的基于获得的位置信息和速度信息计算磁性目标体的磁矩矢量,计算方法如下
技术总结
本发明提供一种基于感应电动势的运动磁性目标响应计算和追踪方法,方法通过构建由至少由三个三分量磁感应线圈组成的传感器阵列,利用由磁性目标运动引起传感器中感生的感应电动势,首先通过求解最小二乘问题获得运动磁性目标体的位置矢量,再基于获得的位置矢量,利用多项式拟合获得稳定的速度矢量,最后利用位置矢量和速度矢量计算磁矩矢量。本发明采用的数据为三分量磁感应线圈的感应电动势,该数据幅值与磁性目标体的运动速度成正比,较于传统的磁感应强度数据,其本身携带运动目标的速度信息,更有利于获取准确的速度信息和位置信息。本发明为运动目标的探测和追踪提供了一种新的思路,该方法对速度的敏感性更强。
技术研发人员:罗鸣,裴建新,王启,徐天
受保护的技术使用者:中国海洋大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!