一种掘进机井下自追踪测距装置的制作方法
本发明涉及井下设备行进距离检测,具体是一种掘进机井下自追踪测距装置。
背景技术:
1、智能化快速掘进对于煤矿安全生产的减人增安提效具有重要意义,也是我国煤矿智能化发展的主要方向,被列入了国家2019年发布的《煤矿机器人重点研发目录》和2020年发布的《关于加快煤矿智能化发展的指导意见》之中。而综掘巷道掘进机的姿态和位置检测是实现智能化快速掘进的关键技术,对于提高巷道的掘进质量以及掘进机工作状态的动态监测有着重大的意义。
2、对于井下掘进机行进距离的检测,目前,大多采用惯性导航、机器视觉等。惯性导航由于掘进机长时间行走时会有较大的累计误差,无法单独作业;机器视觉检测受井下光线、粉尘环境的影响,检测精度大大降低。基于激光测距传感器的距离检测是距离标定的有效手段,并且激光对粉尘环境的穿透性较好,检测精度较高,唯一的缺点就是应用到井下掘进机行进距离检测时受机身姿态的变换,测距激光不能有效追踪到标靶,进而造成脱靶出现检测空档。
技术实现思路
1、本发明的目的是提供一种掘进机井下自追踪测距装置,以解决井下昏暗作业环境中掘进机行进距离无法有效精确检测问题。
2、本发明的技术方案是:
3、一种掘进机井下自追踪测距装置,包括:激光测距发射装置、激光测距自追踪标靶装置,所述激光测距发射装置悬挂安装在巷道顶板下方,进行周期扫描工作;所述激光测距自追踪标靶装置垂直安装在掘进机机身中轴线上方,所述激光测距自追踪标靶装置通过接收掘进机机身姿态变换信息,对测距标靶进行姿态补偿;所述激光测距发射装置包括:激光测距发射器和角度位置调整机构,所述激光测距发射器和所述角度位置调整机构连接,所述角度位置调整机构用于对所述激光测距发射器进行平移位置的调整和俯仰角度的调整;所述激光测距自追踪标靶装置包括:平台支架,设置在掘进机机身中轴线上方;圆形支板,架设在所述平台支架上方;三自由度平台结构,设置于所述圆形支板上方,所述三自由度平台结构的顶板为激光靶三角承载板;测距矩形硅光靶,通过t形支座设置在所述激光靶三角承载板上;第三伺服电机,设置在所述平台支架上,所述第三伺服电机的输出轴连接在所述圆形支板底面上。
4、进一步的,所述角度位置调整机构包括:安装架,为一个相邻两边垂直设置的框体,所述安装架顶端设有安装架上板,所述安装架上板上设置多根顶板连轴,安装架通过多根顶板连轴安装在所述巷道顶板上;第一伺服电机,固定在安装架上板的中心位置,第一伺服电机的输出轴穿过安装架上板与安装架固定连接;第一轨道,一端设置在所述安装架的一侧内壁上;第二轨道,一端与所述第一滑轨的另一端连接,所述第二滑轨的另一端连接在所述安装架的另一侧内壁上;丝杠传动机构,设置在第一轨道和第二轨道上方,所述丝杆传动机构的螺母滑动在第二轨道上;发射器支架,设置在所述丝杠传动机构的螺母上方,所述激光测距发射器设置在所述发射器支架一侧面上;第二伺服电机,设置在所述发射器支架的另一侧面上,滑动设置在所述第一轨道上,第二伺服电机的输出轴穿过发射器支架,与激光测距发射器固定相连。
5、进一步的,所述发射器支架为l型,水平部分与丝杠传动机构的螺母连接,竖直部分用于设置第二伺服电机。
6、进一步的,所述三自由度平台结构包括:三处液压机构,每处液压机构均铰接在所述圆形支板上方;三处万向机构,三处所述液压机构的上方通过所述万向机构与所述激光靶三角承载板连接。
7、进一步的,每处所述液压机构包括:液压缸;液压杆,一端连接液压缸,另一端连接万向机构;转轴,转轴与液压缸垂直固定连接,且穿设在液压缸靠近圆型支板的一端;u型连接座,设置在圆形支板上方,液压缸嵌入u型连接座的内部,转轴的两端与u型连接座通过轴承转动连接。
8、进一步的,所述万向机构包括:万向连接座,固定焊接在激光靶三角承载板下方的端点处;万向接头,设置在所述液压杆的另一端上,所述万向接头和所述万向连接座通过万向轴铰接连接。
9、进一步的,激光靶三角承载板为等边三角形板体。
10、进一步的,所述测距矩形硅光靶表面遍布硅光电池贴片,在有激光照射时能够输出小额电压信号,用于判断激光测距发射器接收的反射激光束是否由测距标靶反射输出。
11、一种掘进机井下自追踪测距装置进行自追踪测距的方法,所述激光测距发射装置进行周期工作,激光测距自追踪标靶装置与掘进机偏航角作相反同等角度旋转运动,完成标靶偏航角补偿。
12、所述激光测距发射装置进行周期工作的具体步骤为:首先激光测距发射器由第二轨道左端水平位置作为起点,进行上下俯仰运动扫描±θ角,回到水平位置时,在丝杠传动机构驱动下向右平移△x,继续进行上下俯仰运动扫描运动,直到平移至第二轨道右端水平位置进行俯仰扫描运动完成一个工作周期;
13、激光测距自追踪标靶装置在第三伺服电机的驱动下,与掘进机偏航角作相反同等角度旋转运动,完成标靶偏航角补偿;同时易知,液压杆伸缩量l与激光靶三角承载板的起伏角度∈成线性关系:∈=kl+b,通过一号液压机构与二、三号液压机构的相对位移,完成标靶俯仰角的补偿,在掘进机机身右偏时,激光靶三角承载板边长为c的情况下,二号液压机构抬升l位移量,同时一号液压机构抬升完成标靶横滚角的补偿,使得测距标靶始终垂直于巷道面。
14、与现有技术相比,本发明的有益效果是:
15、1、能够根据掘进机实时位姿偏移量做出测距标靶的姿态补偿,同时利用激光测距发射器的周期扫描运动,解决井下测距装置的跑靶问题;
16、2、通过激光测距自追踪标靶装置中的硅光电池贴片在激光照射输出电压信号,能够排除车体、煤壁等对激光测距发射器的测距干扰,使激光测距传感器在井下进行掘进机行进距离检测成为了可能。
17、3、激光测距,相对于惯导、机器视觉、里程计测距等检测方法,其对粉尘穿透性强、没有累计误差且不受昏暗环境与履带滑移等因素的影响,环境适应性较强。
技术特征:
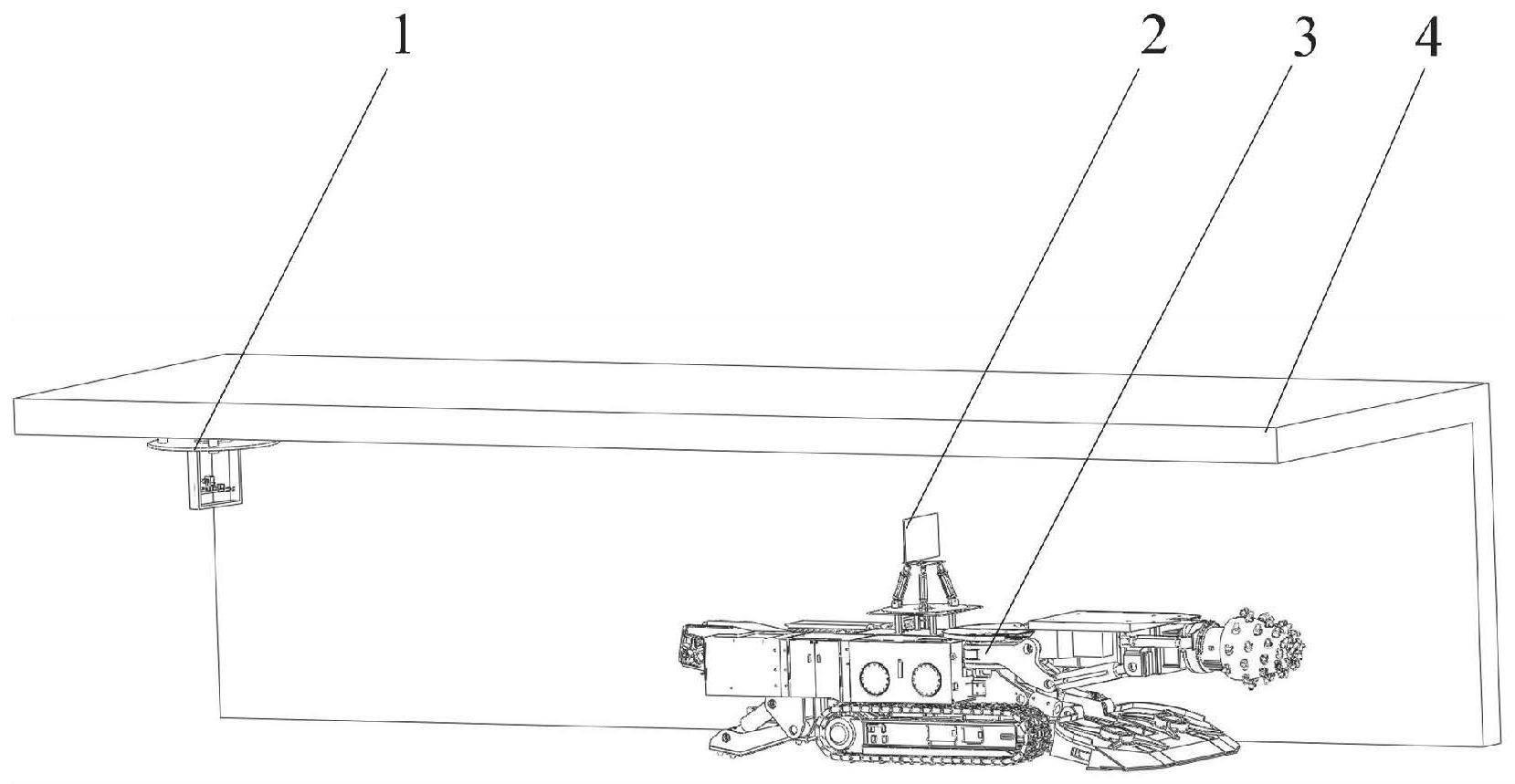
1.一种掘进机井下自追踪测距装置,其特征在于,包括:激光测距发射装置(1)、激光测距自追踪标靶装置(2),所述激光测距发射装置(1)悬挂安装在巷道顶板(4)下方,进行周期扫描工作;所述激光测距自追踪标靶装置(2)垂直安装在掘进机(3)机身中轴线上方,所述激光测距自追踪标靶装置(2)通过接收掘进机(3)机身姿态变换信息,对测距标靶进行姿态补偿;
2.根据权利要求1所述的一种掘进机井下自追踪测距装置,其特征在于,所述角度位置调整机构包括:
3.根据权利要求2所述的一种掘进机井下自追踪测距装置,其特征在于,所述发射器支架(107)为l型,水平部分与丝杠传动机构(108)的螺母连接,竖直部分用于设置第二伺服电机(105)。
4.根据权利要求1所述的一种掘进机井下自追踪测距装置,其特征在于,所述三自由度平台结构包括:
5.根据权利要求4所述的一种掘进机井下自追踪测距装置,其特征在于,每处所述液压机构包括:
6.根据权利要求5所述的一种掘进机井下自追踪测距装置,其特征在于,所述万向机构包括:
7.根据权利要求1所述的一种掘进机井下自追踪测距装置,其特征在于,激光靶三角承载板(203)为等边三角形板体。
8.根据权利要求1所述的一种掘进机井下自追踪测距装置,其特征在于,所述测距矩形硅光靶(201)表面遍布硅光电池贴片(20101)。
9.根据权利要求1所述的一种掘进机井下自追踪测距装置进行自追踪测距的方法,其特征在于,所述激光测距发射装置(1)进行周期工作,激光测距自追踪标靶装置(2)与掘进机偏航角作相反同等角度旋转运动,完成标靶偏航角补偿。
10.根据权利要求9所述的一种掘进机井下自追踪测距装置进行自追踪测距的方法,其特征在于,所述激光测距发射装置(1)进行周期工作的具体步骤为:首先激光测距发射器(106)由第二轨道(1010)左端水平位置作为起点,进行上下俯仰运动扫描±θ角,回到水平位置时,在丝杠传动机构(108)驱动下向右平移△x,继续进行上下俯仰运动扫描运动,直到平移至第二轨道(1010)右端水平位置进行俯仰扫描运动完成一个工作周期;
技术总结
本发明公开了一种掘进机井下自追踪测距装置,包括激光测距发射装置、激光测距自追踪标靶装置,根据机载光纤惯导系统实时检测掘进机机身姿态偏移量,并将偏移信息传输至测距系统上位机进行数据处理解析,电液伺服阀接收数据解析信号,驱动液压机构动作实现激光测距硅光靶的姿态补偿,使得测距标靶始终垂直于巷道面;激光测距发射装置通过丝杠与电机驱动对姿态整定后的标靶作周期扫描运动,通过检测测距矩形硅光靶存在输出电压时的激光测距发射器输出值,完成掘进机行进距离的动态监测,提高井下综掘作业的智能化水平,实现掘进机作业进程的动态监测。
技术研发人员:李永明,刘亚,彭继国,郑瑞良,杨木易,孙凌飞,杨健,汪洋,李奇蓬,马志愿
受保护的技术使用者:山东能源集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!