一种海底地形智能扫测与自主定位系统
本发明属于auv水下导航与感知领域,具体涉及一种海底地形智能扫测与自主定位系统。
背景技术:
1、随着海洋产业不断发展和壮大,水下机器人作为海洋资源开发不可或缺的一把利器,目前已经得到了极大的发展,在水下机器人的关键技术中,水下机器人的定位与感知能力仍然是制约水下机器人发展的关键。在水下环境中,水下机器人的定位方式主要依赖于惯性导航系统,在此基础上结合水声定位系统、地球物理导航系统和地形辅助导航系统等技术,在这种情况下,水下机器人定位受到诸多限制,自主性较差,智能化水平相对较低,难以满足自主海底地形扫测作业的需求。
2、海底地形扫测是水下机器人进行水下作业中的一项重要任务,本发明针对水下机器人的扫测作业,为提高水下机器人扫测作业的智能化水平和自主性,提出一种海底地形智能扫测与自主定位系统,在扫测过程中,通过对探测到的海底地形进行可导航性分析和认知,在此基础上规划水下机器人扫测路径,并进一步驱动水下机器人运动从而主动修正定位误差,提高水下机器人作业的智能水平,支撑水下机器人对海底地形的全自主智能扫测。
技术实现思路
1、本发明的目的在于提供一种海底地形智能扫测与自主定位系统。
2、本发明的目的通过如下技术方案来实现:
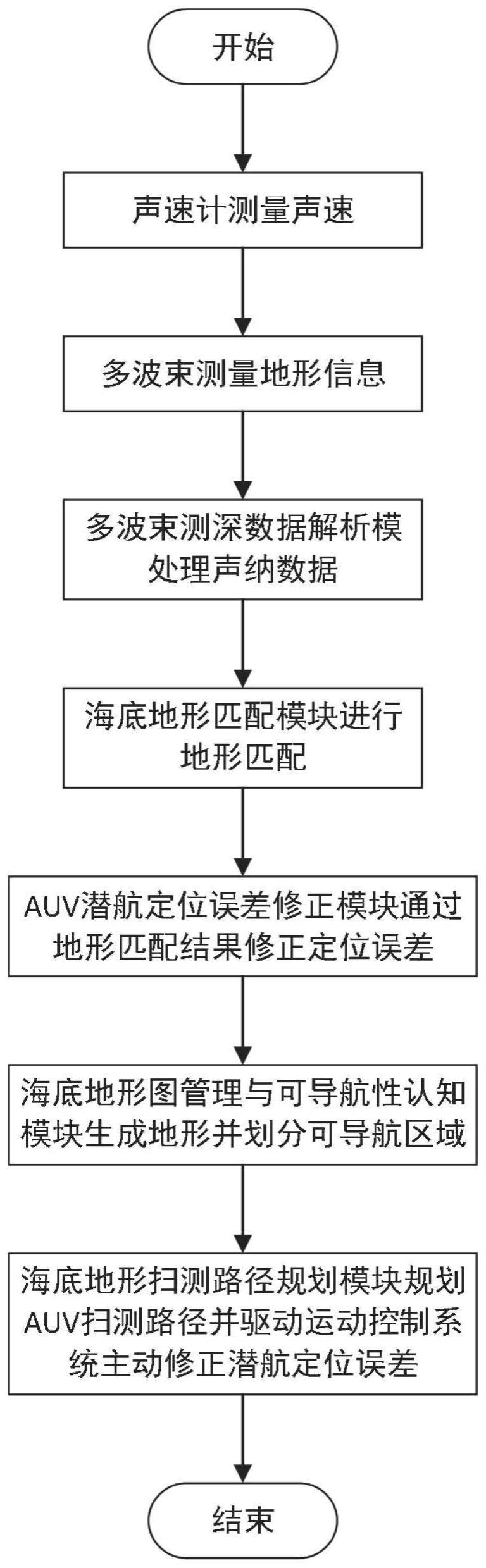
3、一种海底地形智能扫测与自主定位系统,包括智能端电子舱、多波束声纳和声速计;多波束声纳安装于智能端电子舱正下方,声速计安装于智能端电子舱侧下方;声速计测量水下声速的值;多波束声纳在auv运行过程中扫测地形信息;智能端电子舱包括多波束测深数据解析模块、海底地形匹配模块、auv潜航定位误差修正模块、海底地形图管理与可导航性认知模块、海底地形扫测路径规划模块。
4、进一步地,所述多波束测深数据解析模块,实时处理多波束测深脚点信息,实现多波束测深信息滤波与脚点空间归位。
5、进一步地,所述海底地形匹配模块,根据多波束测深信息和先验海图信息,通过点云匹配算法,实时输出auv的航向和位置变化信息。
6、进一步地,所述auv潜航定位误差修正模块,融合惯性导航系统运动信息和地形匹配结果,修正定位信息,实现定位并对定位信息的不确定性进行估计。
7、进一步地,所述海底地形图管理与可导航性认知模块,根据海底地形图分辨率,动态划分海底地形空间,序贯延拓构建、组织管理海底地形子图;海底地形预测与插值,认知任意形状的海底地形可导航性,标记海底地形图中可导航区方位。
8、进一步地,所述海底地形扫测路径规划模块根据预先下达的auv扫测区域控制点坐标,规划控制点合围区域的全覆盖地形扫测路径。
9、进一步地,所述auv潜航定位不确定性超过设定阈值时,进行局部路径规划,根据可导航区方位,回溯到最优方位处的可导航区;潜航定位误差修正完成后重新规划auv航行路径,驱动auv回到全局路径上继续航行。
10、本发明的有益效果在于:
11、1.本发明主要使用auv而非船舶执行对海底地形的扫测作业,并且在auv无需上浮修正潜航定位误差的条件下实现auv对海底地形的全自主智能扫测;
12、2.本发明在执行扫测海底地形扫测作业的同时,通过对海底地形的可导航性认知,智能规划auv扫测路径,驱动auv运动控制系统主动修正潜航定位误差,以此支撑auv对海底地形的全自主智能扫测,提高扫测的精度;
13、3.本发明在auv距底30-40米条件下,该系统作业扫测效率可达到0.25平方千米/小时,生成0.5米高分辨率海图。
技术特征:
1.一种海底地形智能扫测与自主定位系统,其特征在于:包括智能端电子舱、多波束声纳和声速计;多波束声纳安装于智能端电子舱正下方,声速计安装于智能端电子舱侧下方;声速计测量水下声速的值;多波束声纳在auv运行过程中扫测地形信息;智能端电子舱包括多波束测深数据解析模块、海底地形匹配模块、auv潜航定位误差修正模块、海底地形图管理与可导航性认知模块、海底地形扫测路径规划模块。
2.根据权利要求1所述的一种海底地形智能扫测与自主定位系统,其特征在于:所述多波束测深数据解析模块,实时处理多波束测深脚点信息,实现多波束测深信息滤波与脚点空间归位。
3.根据权利要求1所述的一种海底地形智能扫测与自主定位系统,其特征在于:所述海底地形匹配模块,根据多波束测深信息和先验海图信息,通过点云匹配算法,实时输出auv的航向和位置变化信息。
4.根据权利要求1所述的一种海底地形智能扫测与自主定位系统,其特征在于:所述auv潜航定位误差修正模块,融合惯性导航系统运动信息和地形匹配结果,修正定位信息,实现定位并对定位信息的不确定性进行估计。
5.根据权利要求1所述的一种海底地形智能扫测与自主定位系统,其特征在于:所述海底地形图管理与可导航性认知模块,根据海底地形图分辨率,动态划分海底地形空间,序贯延拓构建、组织管理海底地形子图;海底地形预测与插值,认知任意形状的海底地形可导航性,标记海底地形图中可导航区方位。
6.根据权利要求1所述的一种海底地形智能扫测与自主定位系统,其特征在于:所述海底地形扫测路径规划模块根据预先下达的auv扫测区域控制点坐标,规划控制点合围区域的全覆盖地形扫测路径。
7.根据权利要求6所述的一种海底地形智能扫测与自主定位系统,其特征在于:所述auv潜航定位不确定性超过设定阈值时,进行局部路径规划,根据可导航区方位,回溯到最优方位处的可导航区;潜航定位误差修正完成后重新规划auv航行路径,驱动auv回到全局路径上继续航行。
技术总结
本发明公开了一种海底地形智能扫测与自主定位系统,实现AUV对海底地形的全自主智能扫测。本发明主要包括智能端电子舱、多波束声纳和声速计三部分。智能端电子舱包括多波束测深数据解析模块、海底地形图管理与可导航性认知模块、海底地形扫测路径规划模块、海底地形匹配模块、AUV潜航定位误差修正模块。在绘制海底地形图的同时,通过对海底地形的可导航性认知,智能规划AUV扫测路径,驱动AUV运动控制系统主动修正潜航定位误差,支撑AUV对海底地形的全自主智能扫测。
技术研发人员:张强,李晔,马腾,牛伯城,凌宇,曹建,李岳明,张雯轩
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!