基于激光点云分割的马蹄形山岭隧道变形检测方法及系统与流程
本发明涉及山岭隧道扫描领域,特别是涉及一种基于激光点云分割的马蹄形山岭隧道变形检测方法及系统。
背景技术:
1、在马蹄形山岭隧道开挖及后期的运营过程中,由于地质条件的复杂,以及运营开通后时间的增加,山岭隧道会出现越来越多的病害问题,如衬砌漏水、衬砌裂纹、沉降变形、衬砌开裂及剥落,其中隧道衬砌的收敛变形是检测隧道是否安全的重要指标,但由于马蹄形隧道的特殊结构,与一般的圆形隧道有着较大差异,其次山岭隧道内部情况复杂,存在大量噪点,若不经过去噪而直接处理,得到的隧道收敛变形与隧道真实情况出入较大,且人工处理噪点存在主观因素误差较大。
技术实现思路
1、本发明的目的是提供一种基于激光点云分割的马蹄形山岭隧道变形检测方法及系统,能够提高对马蹄形山岭隧道变形检测的准确度。
2、为实现上述目的,本发明提供了如下方案:
3、一种基于激光点云分割的马蹄形山岭隧道变形检测方法,所述方法包括:
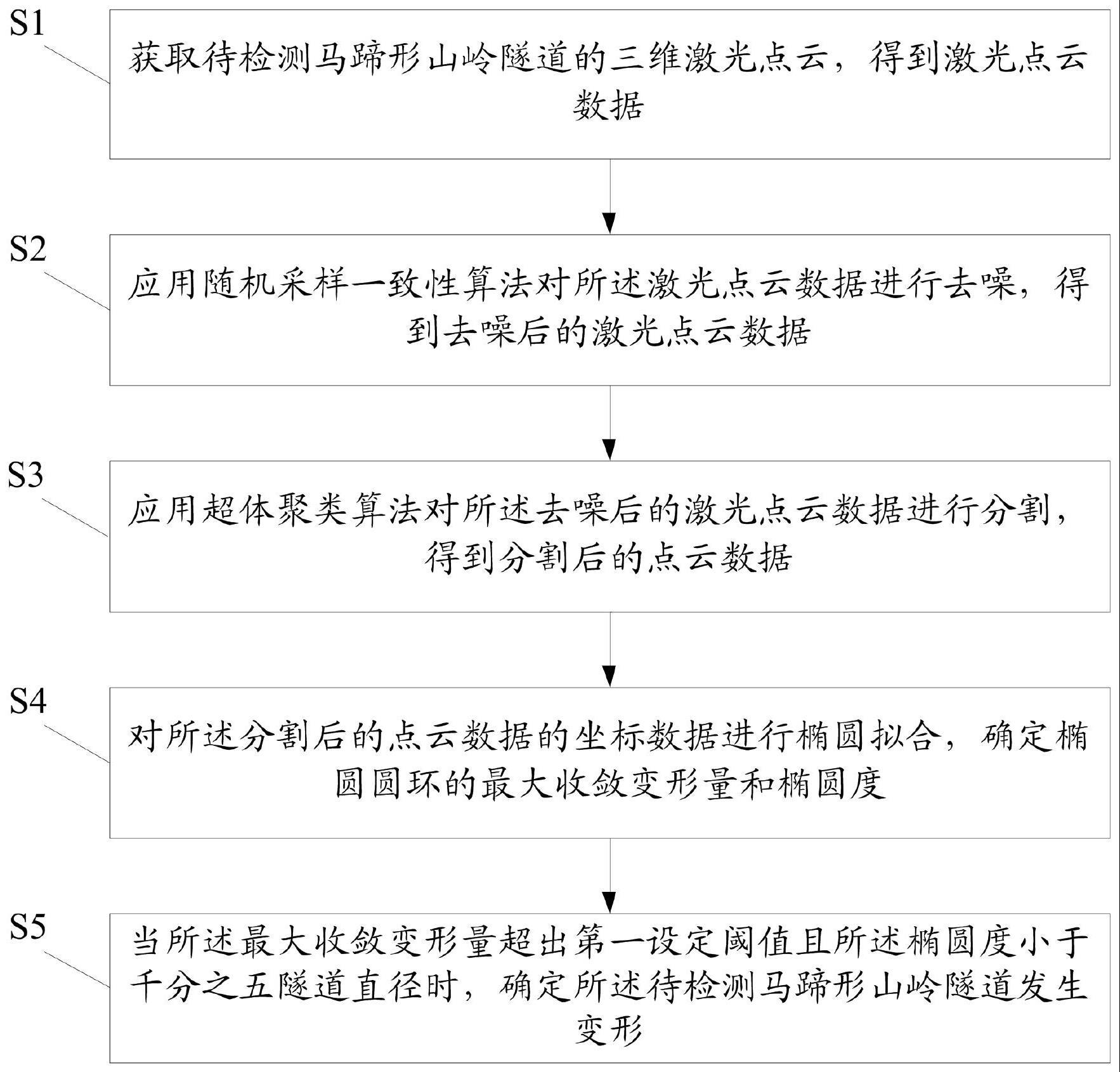
4、获取待检测马蹄形山岭隧道的三维激光点云,得到激光点云数据;
5、应用随机采样一致性算法对所述激光点云数据进行去噪,得到去噪后的激光点云数据;
6、应用超体聚类算法对所述去噪后的激光点云数据进行分割,得到分割后的点云数据;
7、对所述分割后的点云数据的坐标数据进行椭圆拟合,确定椭圆圆环的最大收敛变形量和椭圆度;
8、当所述最大收敛变形量超出第一设定阈值且所述椭圆度小于千分之五隧道直径时,确定所述待检测马蹄形山岭隧道发生变形。
9、可选地,所述获取待检测马蹄形山岭隧道的三维激光点云,得到激光点云数据,具体包括:
10、应用三维激光扫描仪采集所述待检测马蹄形山岭隧道的三维激光点云,得到待检测马蹄形山岭隧道全景点云图像;
11、将所述待检测马蹄形山岭隧道全景点云图像以xyz格式保存,得到激光点云数据。
12、可选地,所述应用随机采样一致性算法对所述激光点云数据进行去噪,得到去噪后的激光点云数据,具体包括:
13、对所述激光点云数据进行分割,得到二维点云数据;
14、对所述二维点云数据应用椭圆匹配算法,得到初始椭圆模型;
15、应用最小二乘法计算所述二维点云数据与所述初始椭圆模型对应的椭圆圆环的两个焦点的距离和的偏差值;
16、当所述偏差值小于第二设定阈值时,根据所述偏差值对应的二维点云数据,得到去噪后的激光点云数据。
17、可选地,应用超体聚类算法对所述去噪后的激光点云数据进行分割,得到分割后的点云数据,具体包括:
18、设定所述超体聚类算法的晶核距离和粒子距离,对所述去噪后的激光点云数据进行分块,得到多个晶核;
19、确定多个所述晶核内的点云数据个数最少的晶核,得到晶粒;
20、计算除所述晶粒外的晶核与所述晶粒的距离,确定所述距离最小值;
21、根据所述距离最小值对应的晶核,确定吞并所述晶粒的晶核,得到更新后的晶核;
22、当所述晶核内的点云数据的个数与所述去噪后的激光点云数据的个数一致时,根据所述晶核内的点云数据为分割后的点云数据。
23、可选地,应用getter函数确定所述分割后的点云数据的坐标数据。
24、一种基于激光点云分割的马蹄形山岭隧道变形检测系统,应用于上述的基于激光点云分割的马蹄形山岭隧道变形检测方法,所述系统包括:
25、获取模块,用于获取待检测马蹄形山岭隧道的三维激光点云,得到激光点云数据;
26、去噪模块,用于应用随机采样一致性算法对所述激光点云数据进行去噪,得到去噪后的激光点云数据;
27、分割模块,用于应用超体聚类算法对所述去噪后的激光点云数据进行分割,得到分割后的点云数据;
28、拟合模块,用于对所述分割后的点云数据的坐标数据进行椭圆拟合,确定椭圆圆环的最大收敛变形量和椭圆度;
29、变形检测模块,用于当所述最大收敛变形量超出第一设定阈值且所述椭圆度小于千分之五隧道直径时,确定所述待检测马蹄形山岭隧道发生变形。
30、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的基于激光点云分割的马蹄形山岭隧道变形检测方法。
31、一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述的基于激光点云分割的马蹄形山岭隧道变形检测方法。
32、根据本发明提供的具体实施例,本发明公开了以下技术效果:
33、本发明提供的一种基于激光点云分割的马蹄形山岭隧道变形检测方法,针对获得到的三维点云数据使用ransac随机采样一致算法对点云进行去噪处理,抽取出马蹄形山岭隧道激光多组点云中的一组点云,并使用椭圆模型去匹配点云,估计出椭圆模型的数学参数,以及采用超体聚类算法进行点云分割处理,最后进行椭圆拟合,分析得到马蹄形山岭隧道的变形收敛值,所以,本发明采用的椭圆拟合方式能够更加准确描述马蹄形隧道的结构,并且对点云数据进行了去噪和分割,使得隧道收敛变形与隧道真实情况更加接近,采用数学方式去噪也能够得到更客观的隧道收敛变形,解决马蹄形山岭隧道激光扫描检测,结果存在误差,人工点云处理繁琐等问题。此外,本发明采用的去噪以及点云分割,对于不同类型山岭隧道的点云处理提供拓展参考应用。
技术特征:
1.一种基于激光点云分割的马蹄形山岭隧道变形检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于激光点云分割的马蹄形山岭隧道变形检测方法,其特征在于,所述获取待检测马蹄形山岭隧道的三维激光点云,得到激光点云数据,具体包括:
3.根据权利要求1所述的基于激光点云分割的马蹄形山岭隧道变形检测方法,其特征在于,所述应用随机采样一致性算法对所述激光点云数据进行去噪,得到去噪后的激光点云数据,具体包括:
4.根据权利要求1所述的基于激光点云分割的马蹄形山岭隧道变形检测方法,其特征在于,应用超体聚类算法对所述去噪后的激光点云数据进行分割,得到分割后的点云数据,具体包括:
5.根据权利要求1所述的基于激光点云分割的马蹄形山岭隧道变形检测方法,其特征在于,应用getter函数确定所述分割后的点云数据的坐标数据。
6.一种基于激光点云分割的马蹄形山岭隧道变形检测系统,其特征在于,所述系统包括:
7.一种电子设备,其特征在于,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行根据权利要求1至5中任一项所述的基于激光点云分割的马蹄形山岭隧道变形检测方法。
8.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至5中任一项所述的基于激光点云分割的马蹄形山岭隧道变形检测方法。
技术总结
本发明公开的基于激光点云分割的马蹄形山岭隧道变形检测方法及系统,涉及山岭隧道扫描领域,该方法包括:获取待检测马蹄形山岭隧道的三维激光点云,得到激光点云数据;应用随机采样一致性算法对激光点云数据进行去噪,得到去噪后的激光点云数据;应用超体聚类算法对去噪后的激光点云数据进行分割,得到分割后的点云数据;对分割后的点云数据的坐标数据进行椭圆拟合,确定椭圆圆环的最大收敛变形量和椭圆度;当最大收敛变形量超出第一设定阈值且椭圆度小于千分之五隧道直径时,确定待检测马蹄形山岭隧道发生变形,本发明能够提高对马蹄形山岭隧道变形检测的准确度。
技术研发人员:柴琦龙,周叶飞,刘国鹏,黄永生,李嘉尉,何伊琦,王然,谢雄耀,韩钊,徐金峰
受保护的技术使用者:中铁十五局集团有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!