一种假人测试平台
本发明属于康复机器人,具体涉及一种假人测试平台。
背景技术:
1、轮椅式下肢康复训练设备可为下肢功能障碍者提供融入社会的必要代步工具和下肢功能康复治疗手段。但是,相应测试手段还处于动力元件和整体机构合理性的分析测试,由于人机作用的功能性质,其人机配合安全性指标不容忽视。
2、目前市场还未有针对此类设备相关的测试标准和国家标准,针对其目前含有的如基本自主移动;被动式下肢康复训练功能;坐站躺三种身姿变换功能;通过控制重心进行的平衡能力训练功能,尚未有成体系的测试方案被提出。
3、因此,亟需研发一种可模拟人体使用工况,由传感器采集的数值量化各项指标并精确判断测试设备实时状态,且各测试模块设计于同一机械结构内的测试平台。
技术实现思路
1、本发明旨在提供一种能够模拟人体使用工况,由传感器采集的数值量化各项指标并精确判断测试设备实时状态,且各测试模块设计于同一机械结构内的测试平台,所采用的技术方案为:
2、一种假人测试平台,包括:
3、假人测试装置,所述假人测试装置包括外挂架和假人,所述假人安装在所述外挂架上,所述假人用于模拟人肢段部件动作,并模拟患者痉挛状态;
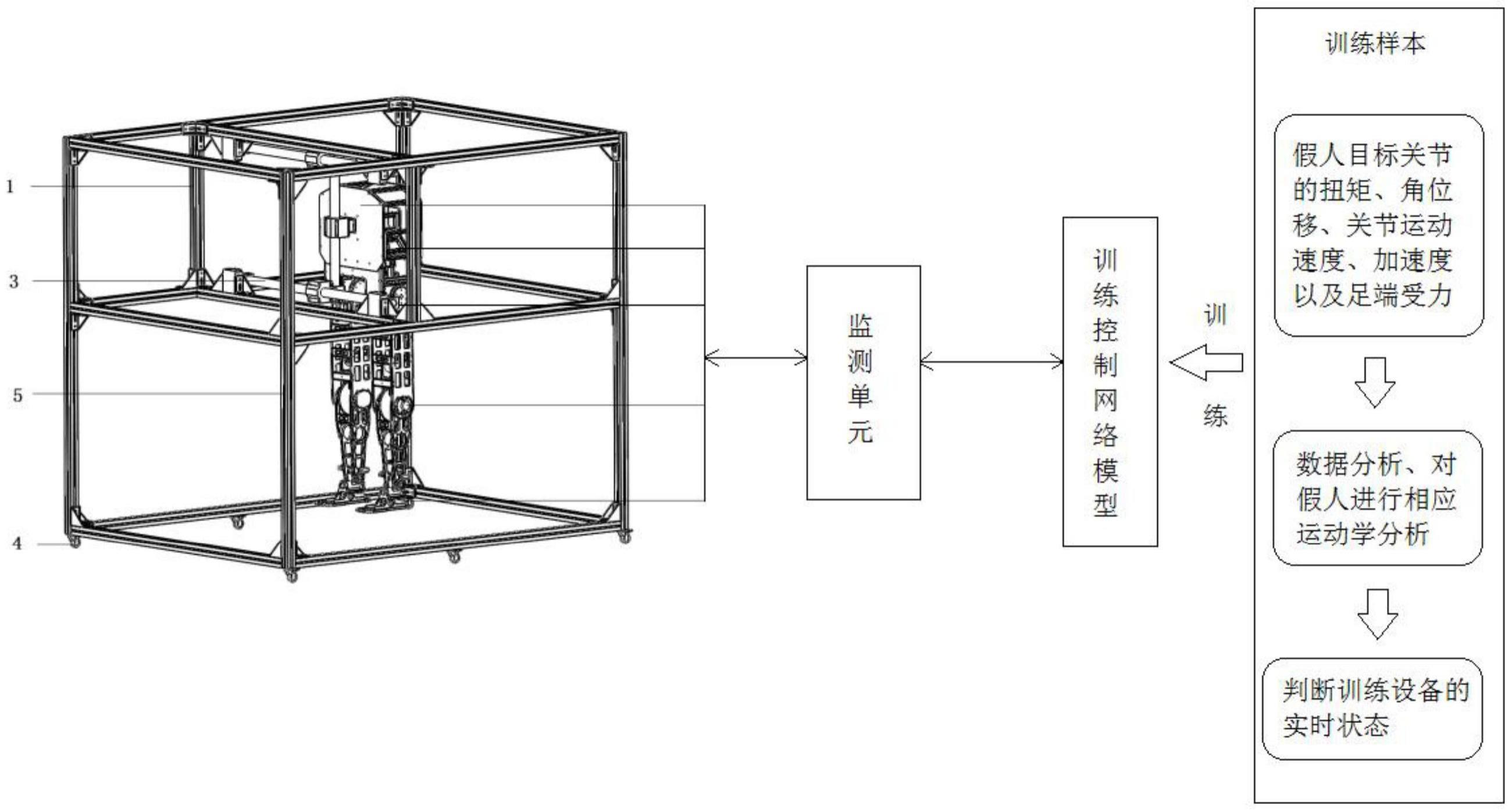
4、监测单元,设置在所述假人的关节处,用于采集所述假人于被动下肢训练及姿态变化时引起的相应参数变化,所述相应参数包括扭矩、角位移、关节运动速度、加速度和足端受力;
5、训练控制单元,为基于卷积神经网络构建的训练控制网络模型;所述训练控制单元与所述监测单元连接;
6、所述训练控制单元通过对所述监测单元采集的相应参数变化进行数据分析、对所述假人进行相应运动学分析,在所述训练控制网络模型输出的状态信息,得到训练数据,并通过所述训练数据来判断训练设备的实时状态,以及是否检测到患者痉挛状态并加以保护,以判断训练设备的安全性。
7、进一步地,所述假人包括依次连接的假人躯干机构、假人髋关节机构、假人大腿机构、假人膝关节机构、假人踝关节机构和假人足部机构;
8、所述外挂架连接有直线导轨组合,所述直线导轨组合与所述假人躯干机构固定连接,以限制所述假人的运动自由度。
9、进一步地,所述躯干机构包括躯干、设置在所述躯干内部的直线导轨,所述躯干内部设有贯穿式丝杆步进电机,其中,所述丝杆步进电机的丝杆贯穿电机内部,所述丝杆步进电机的电机与所述直线导轨连接;
10、所述丝杆步进电机的丝杆与所述假人髋关节机构上的支撑杆连接;
11、所述直线导轨组合与所述躯干固定连接。
12、进一步地,所述监测单元包括设置在所述假人足部机构底部的第一压力传感器、设置在所述假人膝关节机构上的角度传感器、设置在所述假人踝关节机构下的第二压力传感器。
13、进一步地,所述假人膝关节机构设置一自由度,所述假人膝关节机构内设置有刹车摩擦盘;所述假人大腿机构设置两自由度,所述假人大腿机构内部设有气刹抱闸,所述气刹抱闸与所述刹车摩擦盘配合,以为膝关节提供制动扭矩,以模拟患者痉挛状态,判断训练设备是否检测到患者痉挛状态并加以保护,并判断其安全性。
14、进一步地,所述卷积神经网络包括输入层、卷积层、池化层,所述卷积层层数为16、卷积核大小为3*3的卷积层和层数为5的最大池化层。
15、进一步地,还包括训练模块,所述训练模块内具有训练样本,所述训练样本包括80%的训练样本和20%的测试训练样本。
16、进一步地,所述训练模块对所述训练控制网络模型的训练方法包括以下步骤:
17、获取所述训练模块中假人目标关节的扭矩、角位移、关节运动速度、加速度以及足端受力;
18、所述训练控制网络模型对假人目标关节的扭矩、角位移、关节运动速度、加速度以及足端受力进行数据分析、对所述假人进行相应运动学分析,得到训练数据,以判断训练设备的实时状态,其中,训练完成后的训练控制网络模型是利用所述训练模块的训练数据对初始神经网络进行训练后所得到的模型,所述训练数据中包括多组数据,每组所述数据包括假人目标关节的扭矩、角位移、关节运动速度、加速度、足端受力以及对应的训练设备的状态。
19、进一步地,在所述训练控制网络模型对假人目标关节的扭矩、角位移、关节运动速度、加速度以及足端受力进行数据分析、对所述假人进行相应运动学分析之前,所述训练方法还包括:
20、利用假人测试装置对所述假人进行测试,以对应获取所述假人目标关节的扭矩、角位移、关节运动速度、加速度以及足端受力的多组初始数据,其中,一组所述初始数据中包括所述假人目标关节的扭矩、角位移、关节运动速度、加速度、足端受力以及对应的训练设备的状态;从多组所述初始数据中选取所述训练数据。
21、本发明的有益效果:
22、本发明提供的假人测试平台,能够对患者使用训练设备的下肢训练模式、平衡训练模式及发生痉挛状态时,设备所能提供的安全性进行综合、高效的测试,有利于下肢训练设备的安全可靠性评估。
技术特征:
1.一种假人测试平台,其特征在于,包括:
2.根据权利要求1所述的假人测试平台,其特征在于,所述假人包括依次连接的假人躯干机构、假人髋关节机构、假人大腿机构、假人膝关节机构、假人踝关节机构和假人足部机构;
3.根据权利要求2所述的假人测试平台,其特征在于,所述躯干机构包括躯干、设置在所述躯干内部的直线导轨,所述躯干内部设有贯穿式丝杆步进电机,其中,所述丝杆步进电机的丝杆贯穿电机内部,所述丝杆步进电机的电机与所述直线导轨连接;
4.根据权利要求3所述的假人测试平台,其特征在于,所述监测单元包括设置在所述假人足部机构底部的第一压力传感器、设置在所述假人膝关节机构上的角度传感器、设置在所述假人踝关节机构下的第二压力传感器。
5.根据权利要求4所述的假人测试平台,其特征在于,所述假人膝关节机构设置一自由度,所述假人膝关节机构内设置有刹车摩擦盘;所述假人大腿机构设置两自由度,所述假人大腿机构内部设有气刹抱闸,所述气刹抱闸与所述刹车摩擦盘配合,以为膝关节提供制动扭矩,以模拟患者痉挛状态,判断训练设备是否检测到患者痉挛状态并加以保护,并判断其安全性。
6.根据权利要求1所述的假人测试平台,其特征在于,所述卷积神经网络包括输入层、卷积层、池化层,所述卷积层层数为16、卷积核大小为3*3的卷积层和层数为5的最大池化层。
7.根据权利要求6所述的假人测试平台,其特征在于,还包括训练模块,所述训练模块内具有训练样本,所述训练样本包括80%的训练样本和20%的测试训练样本。
8.根据权利要求7所述的假人测试平台,其特征在于,所述训练模块对所述训练控制网络模型的训练方法包括以下步骤:
9.根据权利要求8所述的假人测试平台,其特征在于,在所述训练控制网络模型对假人目标关节的扭矩、角位移、关节运动速度、加速度以及足端受力进行数据分析、对所述假人进行相应运动学分析之前,所述训练方法还包括:
技术总结
本发明公开了一种假人测试平台,属于康复机器人技术领域,其包括:假人测试装置,假人测试装置包括外挂架和假人,假人安装在外挂架上;监测单元,设置在假人的关节处,用于采集假人于被动下肢训练及姿态变化时引起的相应参数变化;训练控制单元,为基于卷积神经网络构建的训练控制网络模型;训练控制单元通过对监测单元采集的相应参数变化进行数据分析、对假人进行相应运动学分析,在训练控制网络模型输出的状态信息,判断训练设备的实时状态。本发明能够对患者使用训练设备的下肢训练模式、平衡训练模式及发生痉挛状态时,能提供的安全性进行综合、高效的测试,有利于下肢训练设备的安全可靠性评估。
技术研发人员:杜妍辰,林俊文
受保护的技术使用者:上海理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!