一种大尺寸晶圆外观缺陷检测设备的制作方法
本申请涉及半导体晶圆检测,特别涉及一种大尺寸晶圆外观缺陷检测设备。
背景技术:
1、硅晶圆是由硅棒经过切割加工所制成的圆形芯片,而硅棒在切割加工为硅晶圆后,表面会有大量的残留物,即便透过抛光和清洗的制程,仍不免会在硅晶圆表面有类似刮伤或水渍的缺陷(defect)存在,因而必须对硅晶圆表面进行缺陷检测,以确保硅晶圆的出货品质。
2、不论是硅晶圆制造厂或是再生硅晶圆厂,目前针对硅晶圆表面检测缺陷的方式仍为人工检测,主要是藉由检测人员的经验对硅晶圆表面的缺陷进行检测,然而利用人工检测硅晶圆表面缺陷的方式容易误判,硅晶圆出厂时因人工未发现缺陷而仍存在瑕疵的问题,导致出厂质量良莠不齐。
技术实现思路
1、本申请实施例提供一种大尺寸晶圆外观缺陷检测设备,以解决相关技术中利用人工检测硅晶圆表面缺陷的方式容易误判,硅晶圆出厂时因人工未发现缺陷而仍存在瑕疵的问题,导致出厂质量良莠不齐的问题。
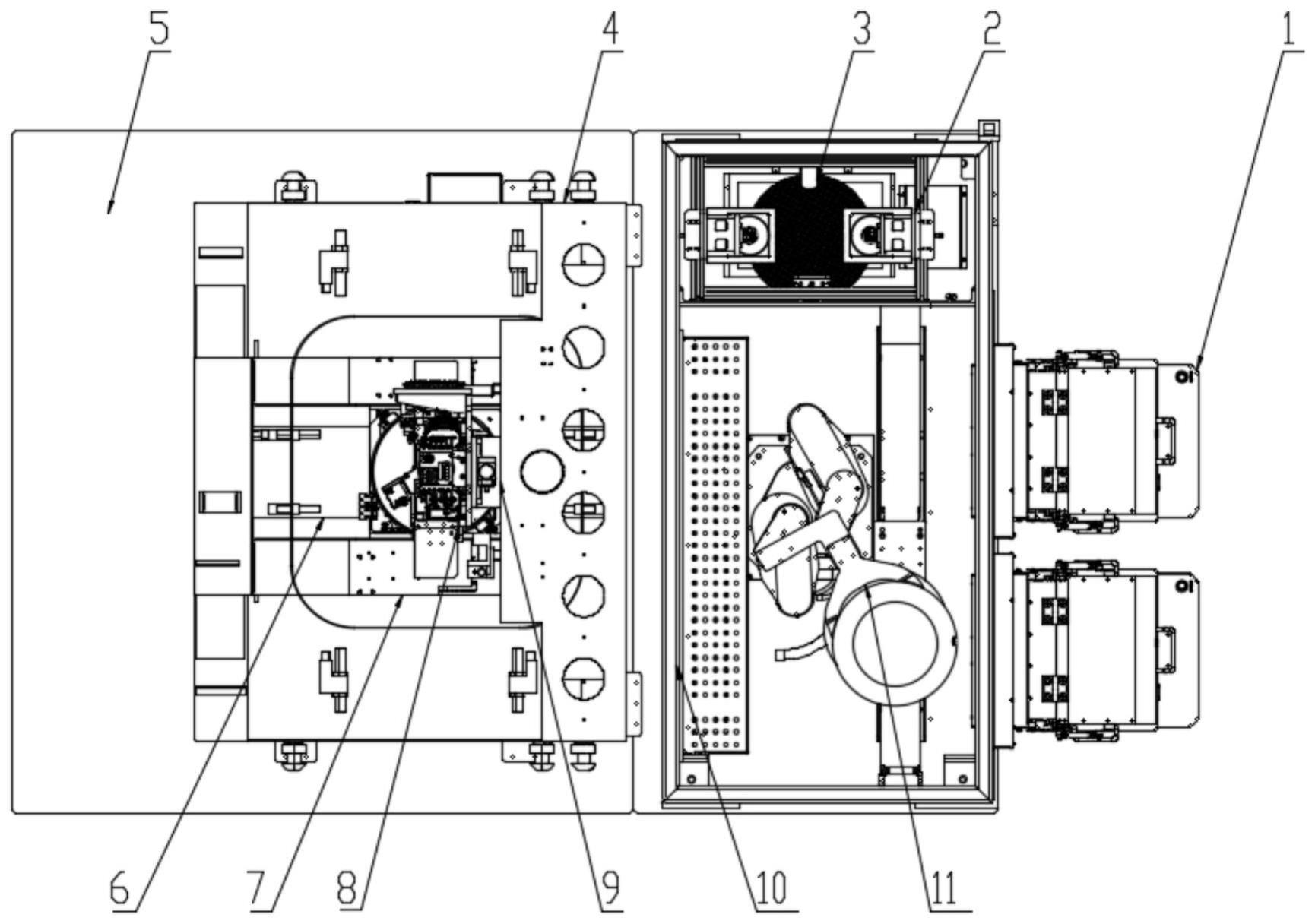
2、本申请实施例提供了一种大尺寸晶圆外观缺陷检测设备,包括:
3、晶圆移送单元,所述晶圆移送单元包括至少两组并列设置的晶圆装载埠,取放晶圆装载埠内的晶圆的晶圆移送机器人,所述晶圆移送机器人上设有检测晶圆装载埠内晶圆位置的晶圆映射传感器,以及驱动晶圆移送机器人在至少两组晶圆装载埠之间往复运动的横移轴模组;
4、晶圆检测单元,所述晶圆检测单元位于晶圆移送单元的一侧,所述晶圆移送单元包括晶圆吸附载台,位于晶圆吸附载台的顶部用于检测并定位晶圆的光机模块,位于晶圆吸附载台的底部用于驱动晶圆沿x轴、y轴移动并旋转至设定角度的驱动模组。
5、在一些实施例中:所述晶圆移送单元还包括矩形机架,所述矩形机架的正面设有上下料口,所述晶圆装载埠固定在矩形机架外且与上下料口相通,所述横移轴模组位于矩形机架内且与矩形机架的背面固定连接,所述晶圆移送机器人与横移轴模组连接并悬空于矩形机架内。
6、在一些实施例中:所述晶圆移送单元还包括对晶圆进行预定位的大视野相机对位模块,所述大视野相机对位模块位于晶圆移送机器人的一侧,所述大视野相机对位模块包括:
7、晶圆寻边器,所述晶圆寻边器用于带动晶圆沿x轴、y轴移动并旋转至设定角度;
8、大视野相机,所述大视野相机设有两组并分别位于晶圆寻边器顶部的两侧,以分别采集晶圆的弧边图像信息;
9、控制器,控制器用于获取弧边图像信息以确定晶圆圆心位置与预设位置的偏差值,并将偏差值发送至晶圆寻边器。
10、在一些实施例中:还包括用于采集晶圆特征图像信息的寻边器相机,所述寻边器相机与控制器连接,所述控制器获取晶圆特征图像信息,并通过晶圆寻边器将晶圆旋转至设定角度。
11、在一些实施例中:所述大视野相机均连接有大视野镜头,所述大视野镜头的前端设有朝晶圆寻边器方向补光的同轴光源,所述晶圆寻边器上设有朝晶圆背面照射的背光源,以及扫描晶圆上条码信息的读码头。
12、在一些实施例中:所述晶圆检测单元还包括承重板和位于承重板顶部的底座,所述底座的顶部设有固定驱动模组的大理石平台,所述大理石平台的顶部设有固定光机模块的大理石龙门架,所述底座和大理石平台之间设有多个弹性支撑所述大理石平台的减振气弹簧。
13、在一些实施例中:所述光机模块包括获取晶圆图像信息的扫描相机和复检相机,以及测量扫描相机和复检相机距离晶圆垂直距离的测距传感器,所述光机模块连接有调节光机模块与晶圆之间垂直距离的z轴直线模组。
14、在一些实施例中:所述驱动模组包括驱动晶圆吸附载台沿x轴直线运动的x轴直线模组,位于x轴直线模组的顶部用于驱动晶圆吸附载台沿y轴直线运动的y轴直线模组,位于y轴直线模组的顶部用于驱动晶圆吸附载台转动的dd马达,所述晶圆吸附载台固定在dd马达的顶部。
15、在一些实施例中:还包括容纳圆移送单元和晶圆检测单元的机壳,所述机壳的顶部设有风机过滤机组和报警器,所述机壳内设有消除机壳内静电的离子风棒,机壳的侧壁上设有多个检修门。
16、在一些实施例中:所述机壳的正面设有控制圆移送单元和晶圆检测单元的操作界面。
17、本申请提供的技术方案带来的有益效果包括:
18、本申请实施例提供了一种大尺寸晶圆外观缺陷检测设备,由于大尺寸晶圆外观缺陷检测设备设置了晶圆移送单元,该晶圆移送单元包括至少两组并列设置的晶圆装载埠,取放晶圆装载埠内的晶圆的晶圆移送机器人,晶圆移送机器人上设有检测晶圆装载埠内晶圆位置的晶圆映射传感器,以及驱动晶圆移送机器人在至少两组晶圆装载埠之间往复运动的横移轴模组;晶圆检测单元,该晶圆检测单元位于晶圆移送单元的一侧,晶圆移送单元包括晶圆吸附载台,位于晶圆吸附载台的顶部用于检测并定位晶圆的光机模块,位于晶圆吸附载台的底部用于驱动晶圆沿x轴、y轴移动并旋转至设定角度的驱动模组。
19、因此,本申请的大尺寸晶圆外观缺陷检测设备采用晶圆移送单元和晶圆检测单元相互配合实现对晶圆的自动移送和自动光学外观检测。晶圆装载埠用于取放和存储晶圆盒,并对晶圆盒进行开启和关闭,降低晶圆的损坏和污染率。晶圆移送机器人用于取放晶圆装载埠内的晶圆,将晶圆移送至晶圆检测单元对晶圆进行缺陷检测,并将检测后的晶圆移送至晶圆盒内。晶圆映射传感器用于扫描晶圆装载埠内晶圆的位置及数量,以及查找是否存在晶圆斜插、重叠、以及破损现象。横移轴模组用于驱动晶圆移送机器人在至少两组晶圆装载埠之间往复运动,以使晶圆移送机器人覆盖所有晶圆装载埠,提高晶圆移送机器人的抓取效率。
20、晶圆吸附载台用于吸附由晶圆移送机器人移送的晶圆,晶圆吸附载台顶部的光机模块用于检测并定位晶圆,对晶圆的表面进行外观缺陷检测。晶圆吸附载台的底部设有用于驱动晶圆沿x轴、y轴移动并旋转至设定角度的驱动模组,该驱动模组不仅对晶圆进行精确定位,还用于光机模块对晶圆的表面进行外观缺陷检测,驱动晶圆沿着设定轨迹运动,以扫描晶圆的各个检测区域。本申请可实现晶圆的全程自动化移送和自动化外观缺陷检测,提高了晶圆检测效率和检测质量。
技术特征:
1.一种大尺寸晶圆外观缺陷检测设备,其特征在于,包括:
2.如权利要1所述的一种大尺寸晶圆外观缺陷检测设备,其特征在于:
3.如权利要1或2所述的一种大尺寸晶圆外观缺陷检测设备,其特征在于:
4.如权利要3所述的一种大尺寸晶圆外观缺陷检测设备,其特征在于:
5.如权利要3所述的一种大尺寸晶圆外观缺陷检测设备,其特征在于:
6.如权利要1所述的一种大尺寸晶圆外观缺陷检测设备,其特征在于:
7.如权利要1或6所述的一种大尺寸晶圆外观缺陷检测设备,其特征在于:
8.如权利要1或6所述的一种大尺寸晶圆外观缺陷检测设备,其特征在于:
9.如权利要1所述的一种大尺寸晶圆外观缺陷检测设备,其特征在于:
10.如权利要9所述的一种大尺寸晶圆外观缺陷检测设备,其特征在于:
技术总结
本申请涉及一种大尺寸晶圆外观缺陷检测设备,属于半导体晶圆检测设备技术领域,包括:晶圆移送单元,其包括至少两组并列设置的晶圆装载埠,取放晶圆装载埠内的晶圆的晶圆移送机器人,晶圆移送机器人上设有检测晶圆装载埠内晶圆位置的晶圆映射传感器,以及驱动晶圆移送机器人在至少两组晶圆装载埠之间往复运动的横移轴模组;晶圆检测单元,其位于晶圆移送单元的一侧,晶圆移送单元包括晶圆吸附载台,位于晶圆吸附载台的顶部用于检测并定位晶圆的光机模块,位于晶圆吸附载台的底部用于驱动晶圆沿X轴、Y轴移动并旋转至设定角度的驱动模组。本申请可实现晶圆的全程自动化移送和自动化外观缺陷检测,提高了晶圆检测效率和检测质量。
技术研发人员:王进文,张虎,邓忠光,欧昌东
受保护的技术使用者:武汉精立电子技术有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!