一种用于公路基础设施三维数据采集的方法及系统
本发明涉及公路基础设施数据采集,尤其涉及一种用于公路基础设施三维数据采集的方法及系统。
背景技术:
1、随着交通数字化的发展,公路行业正加速推动数字化相关技术研发与应用部署,其中,构建路面、边坡、边沟、安全设施、管理设施、服务设施等公路基础设施三维数字化模型是推动智慧公路建设的前提,可为路网资产管理、运行监测、调度指挥、养护、执法等公路业务提供支撑。随着人工智能、云计算、大数据等新一代信息技术的兴起,作为智慧公路底座的基础设施数据形态从二维向三维发展,目的在于实现公路业务精细化管理与服务,因此有必要形成针对公路基础设施三维数据的采集方法及系统。
2、目前,用于公路基础设施三维空间地理数据获取的传统方法,如全站仪、rtk人工测量方式需要耗费大量的人力和时间成本,另一方面,当前新型的数据采集方式也存在一些不足,如采用车载移动检测技术无法较好地获取路基边坡、边沟等路侧基础设施,采用高分遥感技术难以满足数据采集精度与更新周期的要求,采用bim软件建模技术建立公路基础设施模型的精度虽高,但是成本费用也高,不适用于大范围公路基础设施的三维数据建模。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种用于公路基础设施三维数据采集的方法及系统,解决公路基础设施三维数据采集的完整性不足、精度和效率较低的问题。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、第一方面,本发明提供了一种用于公路基础设施三维数据采集的方法,所述方法包括:
4、获取公路基础设施三维建模的激光点云数据;
5、获取公路基础设施三维建模的倾斜影像;
6、对获取的公路基础设施三维建模的激光点云数据和倾斜影像进行存储和处理,输出公路基础设施的高精度三维数字模型。
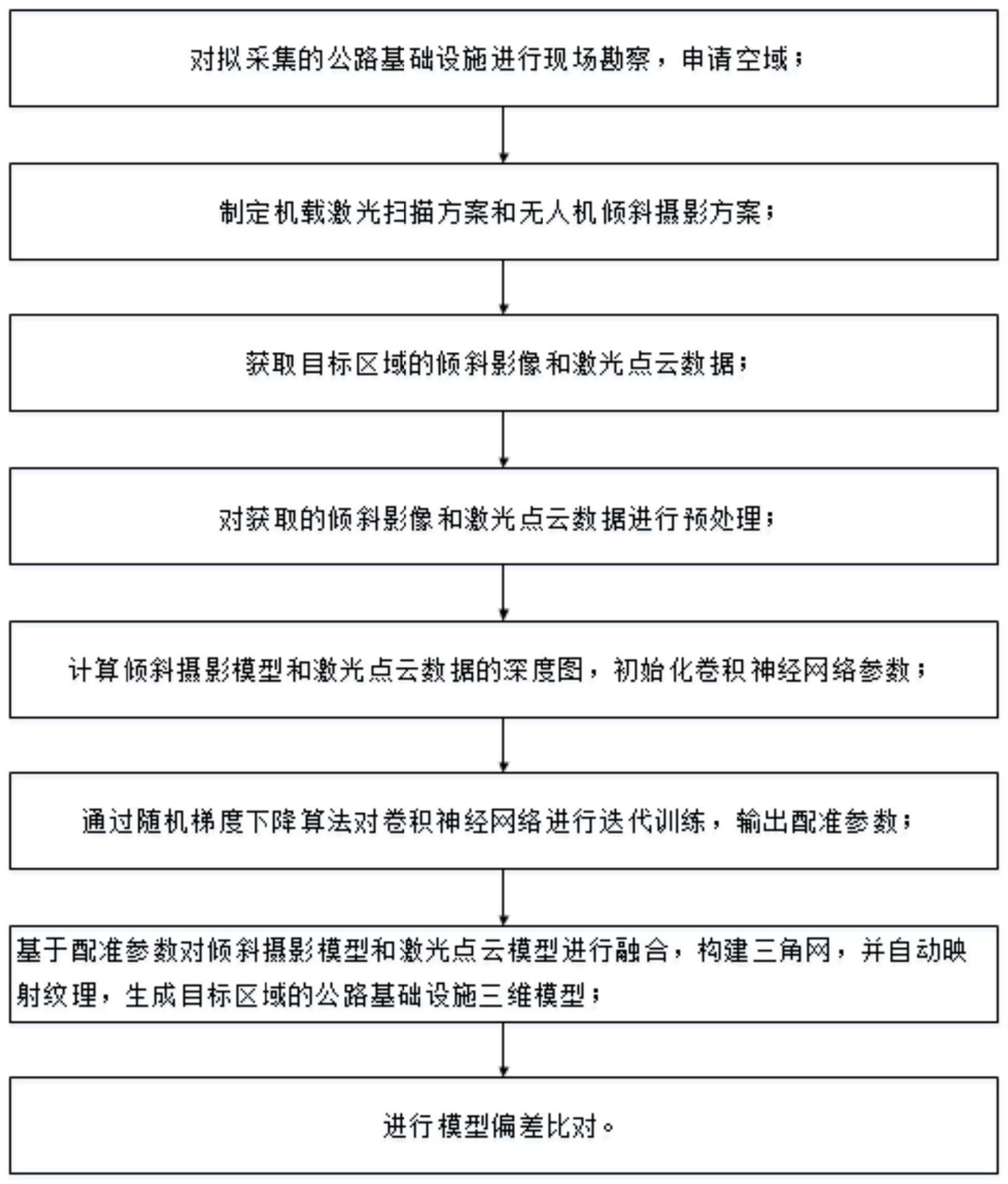
7、进一步的,所述对获取的公路基础设施三维建模的激光点云数据和倾斜影像进行存储和处理,输出公路基础设施的高精度三维数字模型,包括:
8、对获取的公路基础设施三维建模的激光点云数据和倾斜影像进行预处理,得到激光点云模型和倾斜摄影模型;
9、输入激光点云模型和倾斜摄影模型,计算激光点云模型和倾斜摄影模型的深度图像,初始化卷积神经网络参数;
10、输入激光点云模型和倾斜摄影模型的深度图像,对卷积神经网络进行迭代训练,输出配准参数;
11、基于配准参数对激光点云模型和倾斜摄影模型进行融合,构建三角网,并自动映射纹理,生成并输出目标区域的公路基础设施的高精度三维数字模型。
12、进一步的,所述对获取的公路基础设施三维建模的激光点云数据和倾斜影像进行预处理,得到激光点云模型和倾斜摄影模型,包括:
13、对获取的公路基础设施三维建模的激光点云数据进行建模,得到激光点云模型;对倾斜影像进行建模,得到倾斜摄影模型。
14、进一步的,所述输入激光点云模型和倾斜摄影模型,计算激光点云模型和倾斜摄影模型的深度图像,初始化卷积神经网络参数,包括:
15、输入激光点云模型和倾斜摄影模型,通过融合配准算法计算出激光点云模型的深度图像和倾斜摄影模型的深度图像。
16、进一步的,所述输入激光点云模型和倾斜摄影模型的深度图像,对卷积神经网络进行迭代训练,输出配准参数,包括:
17、将激光点云模型的深度图像和倾斜摄影模型的深度图像输入卷积神经网络,所述卷积神经网络提取激光点云模型的深度图像和倾斜摄影模型的深度图像的特征,将特征输入回归模型;
18、使用随机梯度下降算法对卷积神经网络进行迭代训练,通过有限次数的不断迭代训练,得到训练好的配准卷积神经网络模型;
19、将未配准的激光点云模型的深度图像和倾斜摄影模型的深度图像输入配准卷积神经网络模型,输出配准参数。
20、第二方面,本发明提供了一种用于公路基础设施三维数据采集的系统,包括:
21、机载激光扫描模块,用于获取公路基础设施三维建模的激光点云数据;
22、倾斜摄影测量模块,用于获取公路基础设施三维建模的倾斜影像;
23、数据处理模块,用于对获取的公路基础设施三维建模的激光点云数据和倾斜影像进行存储和处理,输出公路基础设施的高精度三维数字模型。
24、进一步的,所述机载激光扫描模块包括机载激光雷达、机载相机、高精度惯导和三轴云台;
25、进一步的,所述倾斜摄影测量模块包括图像传感器、三轴云台和高精度惯导。
26、进一步的,所述数据处理模块通过安装在计算机中的实景建模软件,对获取的公路基础设施三维建模的激光点云数据和倾斜影像进行数据融合。
27、与现有技术相比,本发明所达到的有益效果:
28、本发明利用无人机机载激光雷达和无人机倾斜摄影技术采集公路基础设施三维数据,通过将公路基础设施倾斜影像数据和激光点云数据融合配准得到完整的公路基础设施三维模型,模型精度较高,可有效弥补其它采集技术的不足,解决了公路基础设施三维数据采集完整性不够、精度和效率较低的难题。
技术特征:
1.一种用于公路基础设施三维数据采集的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种用于公路基础设施三维数据采集的方法,其特征在于,所述对获取的公路基础设施三维建模的激光点云数据和倾斜影像进行存储和处理,输出公路基础设施的高精度三维数字模型,包括:
3.根据权利要求2所述的一种用于公路基础设施三维数据采集的方法,其特征在于,所述对获取的公路基础设施三维建模的激光点云数据和倾斜影像进行预处理,得到激光点云模型和倾斜摄影模型,包括:
4.根据权利要求2所述的一种用于公路基础设施三维数据采集的方法,其特征在于,所述输入激光点云模型和倾斜摄影模型,计算激光点云模型和倾斜摄影模型的深度图像,初始化卷积神经网络参数,包括:
5.根据权利要求2所述的一种用于公路基础设施三维数据采集的方法,其特征在于,所述输入激光点云模型和倾斜摄影模型的深度图像,对卷积神经网络进行迭代训练,输出配准参数,包括:
6.一种用于公路基础设施三维数据采集的系统,其特征在于,包括:
7.根据权利要求6所述的一种用于公路基础设施三维数据采集的系统,其特征在于,所述机载激光扫描模块包括机载激光雷达、机载相机、高精度惯导和三轴云台。
8.根据权利要求6所述的一种用于公路基础设施三维数据采集的系统,其特征在于,所述倾斜摄影测量模块包括图像传感器、三轴云台和高精度惯导。
9.根据权利要求6所述的一种用于公路基础设施三维数据采集的系统,其特征在于,所述数据处理模块通过安装在计算机中的实景建模软件,对获取的公路基础设施三维建模激光点云数据和倾斜影像进行数据融合。
技术总结
本发明公开了一种用于公路基础设施三维数据采集的方法及系统,涉及公路基础设施数据采集技术领域,通过机载激光扫描模块获取公路基础设施三维建模的激光点云数据;通过倾斜摄影测量模块获取公路基础设施三维建模的倾斜影像;通过数据处理模块对获取的公路基础设施三维建模的激光点云数据和倾斜影像进行存储和处理,输出公路基础设施的高精度三维数字模型。本发明利用无人机机载激光雷达和无人机倾斜摄影技术采集公路基础设施三维数据,通过将公路基础设施倾斜摄影数据和激光点云数据融合配准得到完整的公路基础设施三维模型,模型精度较高,可有效弥补其它采集技术的不足。
技术研发人员:王维锋,李阳,赵媛媛,刘坤,孙满,徐阳,邵琳骞,黄建鑫
受保护的技术使用者:河海大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!