基于变虚警检测的相控阵雷达联合空时资源分配方法
本发明属于雷达资源调度,具体涉及一种基于变虚警检测的相控阵雷达联合空时资源分配方法。
背景技术:
1、相控阵雷达凭借其多波束合成和快速扫描能力,具有强大的目标搜索和跟踪功能。恒虚警检测(constant false alarm rate detector,cfar)是相控阵常用的目标搜索方法,通过预先设定虚警概率来检测整个监视空域内的目标,但这种方法无法同时应对近距目标和远程目标同时存在的情况。假若想要检测到远程目标,需要设置较低的门限值,但这会导致在近距空域出现大量虚假目标,而设置较高的检测门限又会导致无法检测到远距目标。因此,为保证远距目标的检测性能,研究一种新的相控阵雷达的检测框架具有重要意义。同时,根据实时感知到的环境信息自适应的调整雷达的资源分配情况,将更多的搜索数据分配到威胁程度更大的子空域,可以更快更准确的检测到真实目标,实现检测性能和资源利用率的同步提升。
2、主要针对相控阵雷达的空间和时间资源展开研究。空间资源分配包括波束指向、波束选择和节点选择;时间分配控制驻留时间、脉冲重复周期、脉冲宽度和传输定时。文献“shi c,wang f,sellathurai m,zhou j and salous s.low probability of intercept-based optimal power allocation scheme for an integrated multistatic radar andcommunication system.ieee sensors journal,2020,14(1):983-994.”研究了在传统恒虚警检测框架下的多平台的最优功率分配问题,通过优化个发射机对雷达信号和通信信号的发射功率分配来最小化总功耗,可以显著提高多站雷达与通信系统的低截获性能。文献“yan j,pu w,dai j,et al.resource allocation for search and track applicationin phased array radar based on pareto bi-objective optimization.ieeetransactions on vehicular technology,2019,68(4):3487-3499.”针对相控阵雷达搜索任务和跟踪任务的时间分配问题,建立了一个双目标约束资源分配方案,并使用提出极大极小算法进行求解。这两种方法中,一种是对在传统检测框架下对信号单域资源的研究,另一种是针对相控阵雷达在搜索和跟踪任务的资源管理。目前对于单站雷达在搜索阶段的联合资源调度研究较少,尤其缺少对于远距目标搜索的研究。因此,有必要对单站雷达的资源调度进行研究。
技术实现思路
1、为解决上述技术问题,本发明提出了一种基于变虚警检测的相控阵雷达联合空时资源分配方法。
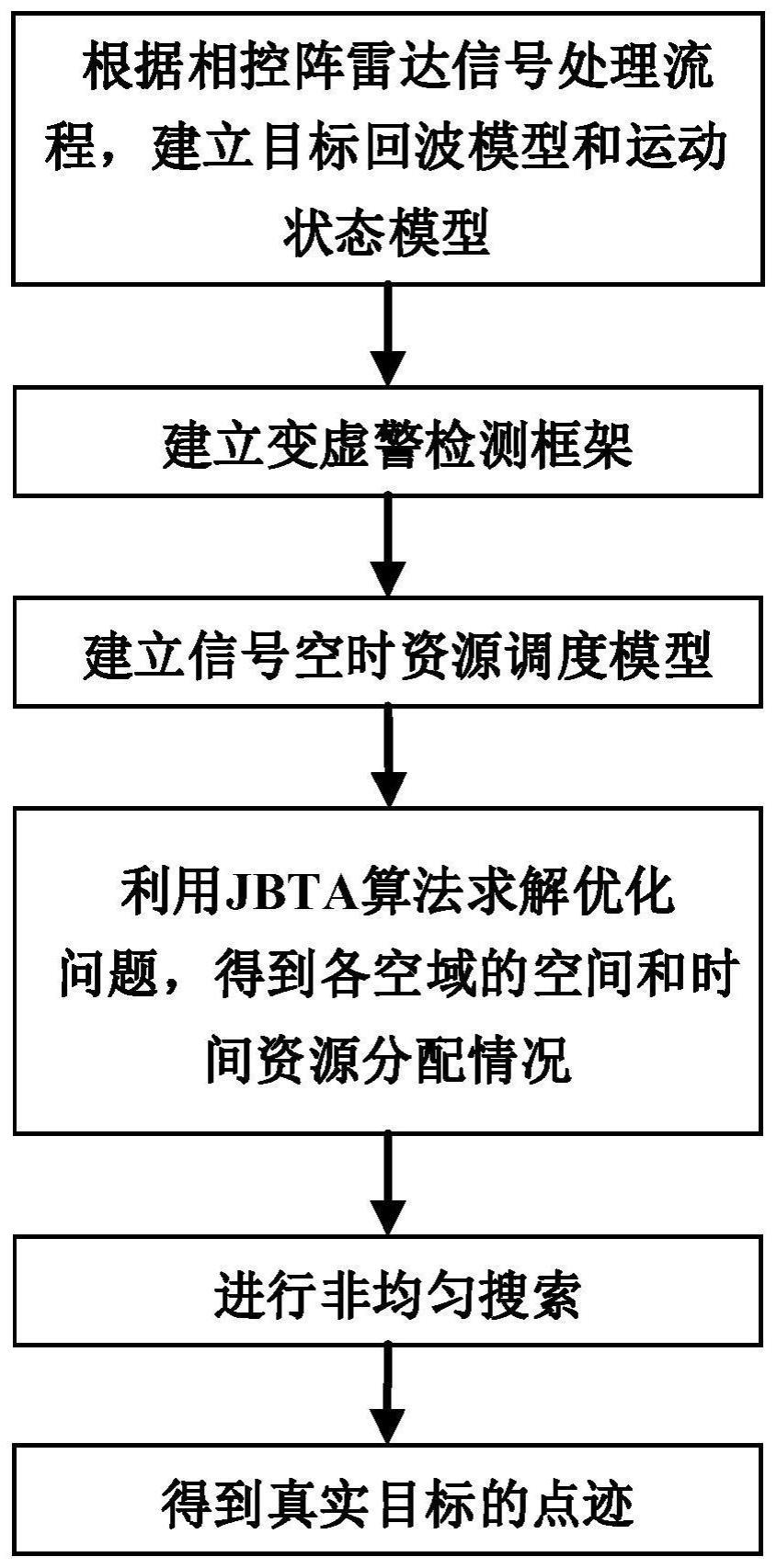
2、本发明采用的技术方案为:一种基于变虚警检测的相控阵雷达联合空时资源分配方法,具体步骤如下:
3、步骤s1、根据相控阵雷达信号接收机处理流程,建立目标回波信号和运动状态模型;
4、步骤s2、建立变虚警检测框架;
5、步骤s3、基于步骤s2建立的框架,构建信号空时资源调度模型;
6、步骤s4、利用jbta算法求解优化问题,得到信号空间和时间资源的分配情况,并进行非均匀搜索,得到真实目标的点迹,输出信号多域资源分配结果。
7、进一步地,所述步骤s1具体如下:
8、设雷达位于(xr,yr),未知目标标记为{1,2,...,q},q表示目标的数量,监视空域被平均划分为d个扇区{d1,d2,…,dd},每一个扇区由一个波束照射。设定发射信号为线性调频信号,第k帧中扇区di的发射信号xi,k(t)为:
9、
10、其中,z表示脉冲序列,ni,k表示第k帧扇区di驻留的脉冲重复周期prt的个数,tr表示脉冲重复周期,fc表示载频,t表示时间,s(t)表示基带线性调频信号,表示为:
11、
12、其中,tp表示脉冲宽度,μ=b/tp表示调频斜率,b表示带宽,rect(·)表示矩形函数。
13、设定目标q∈{1,2,…,q}的初始位置为(xl,q,0,yl,q,0),速度为并位于扇区di。
14、其中,q表示目标的数量,xl,q,0,yl,q,0,和分别表示目标q在x方向上和y方向上的初始距离和速度信息,l表示坐标信息。在第k帧中扇区di,接收由目标发射回来的回波信号经下变频后表示为:
15、
16、其中,τq,k表示目标q在第k帧的时延,fd,q,k表示目标q的多普勒频移,n(t)表示零均值白高斯噪声,其功率为n0=k0t0bnfn,k0,t0,bn,fn分别表示玻尔兹曼常数,雷达系统温度,接收机带宽,接收机噪声系数;αi,q,k表示由传播效应以及目标反射对信号幅度造成的衰减,将其幅度表示为:
17、
18、其中,pt表示发射功率,gt,gr分别表示发射和接收天线增益,λ表示信号波长,σq,k表示目标q在第k帧的雷达截面rcs,表示目标q在第k帧时与雷达之间的距离,xl,q,k和yl,q,k分别表示在第k帧时,目标q在x方向上和y方向上的距离,ls表示系统损耗。
19、经脉冲压缩和相参积累后,将第k帧的信噪比snr表示为:
20、
21、其中,pav表示发射平均功率,k0=pavgtgrλ2tr/((4π)3k0t0fnls)表示预先设定的一个常数。
22、设定作为第k帧时,目标q的状态方程,其中(·)t表示向量或矩阵的转置算子。
23、第k帧下,将目标q的动态模型表示为:
24、xk,q=fxk-1,q+nk,q (6)
25、其中,f表示状态转移矩阵,nk,q表示零均值高斯分布的状态噪声。
26、进一步地,所述步骤s2具体如下:
27、步骤s21、对监视空域按照距离远近的不同进行距离分区的划分;
28、根据监视空域的不同距离设置不同的检测阈值,对远距空域设置较低门限,近距空域设置较高门限:
29、
30、其中,r表示与雷达之间的距离,pfa,k(r)表示第k帧中各个距离分区的虚警概率,pfa,k,s表示距离分区s的特定虚警概率,并将整个监视空域划分为s个距离分区,rs-1和rs表示第s个距离分区的两个距离边界。
31、步骤s22、在多阶段的搜索过程中,初始检测阶段使用低阈值进行检测,并在后续检测中,检测阈值逐渐增大,将各阶段的检测阈值表示为:
32、
33、其中,表示第k帧和第k-1帧之间虚警概率的变化(k>1)。
34、进一步地,所述步骤s3具体如下:
35、步骤s31、构建目标函数;
36、设定第k帧阶阶段各个扇区的重要程度为wk=[w1,k,w2,k,…,wd,k]t。
37、其中,wi,k(i=1,2,…d)表示扇区di在第k阶段的重要程度。
38、设定nk=[n1,k,n2,k,...,nd,k]h表示各个扇区内驻留的prt的数量,(·)h表示向量或矩阵的共轭操作,n1,k表示扇区d1中驻留的prt的数量,n2,k表示扇区d2中驻留的prt的数量,nd,k表示扇区dd中驻留的prt的数量。基于变虚警检测框架,提出一个联合空间和时间的资源调度的优化模型u(wk,nk):
39、
40、其中,snri,k(ni,k)表示扇区di在第k帧的信噪比,由各个子空域的snr确定,设定各个子空域的snr的确定标准为:
41、(1)若扇区di中不存在点迹,设定snri,k(ni,k)=0;
42、(2)若扇区di中存在一个点迹,设定snri,k(ni,k)表示为该点迹的信噪比;
43、(3)若扇区di中存在多个点迹,设定qi,k表示扇区di中点迹的数目。
44、步骤s32、构建约束条件;
45、总搜索时间约束表示为:
46、
47、其中,ttotal表示一帧检测中的总搜索时间。在每一帧检测中,各扇区的最大和最小时间约束为:
48、tmin,i,k≤ni,ktr≤tmax (11)
49、其中,tmin,i,k表示扇区di在第k帧时的最小时间约束,tmax表示最大时间约束。
50、若扇区di中存在疑似点迹,则需满足:
51、
52、其中,tuni表示均匀搜索时各扇区的驻留时间,tmin1表示扇区中不存在点迹时的最小驻留时间,tmin2表示扇区中存在点迹时的最小驻留时间,ai,k表示是否存在点迹的判断因子,具体为:
53、
54、在存在点迹的扇区中,对其信噪比进行约束:
55、snrmin,k≤snrm,k≤snrmax,k (14)
56、其中,m=1,2,...,m,m表示存在点迹的扇区数目,snrmin,k和snrmax,k分别表示各扇区信噪比的最大值和最小值,snrm,k表示第k帧时第m个存在目标扇区的信噪比。
57、步骤s33、根据构建的目标函数和约束条件,得到优化模型;
58、优化模型表达为:
59、
60、进一步地,所述步骤s4中,jbta算法求解流程具体如下:
61、步骤s41、令k=1,初始化wk、nk、pfa,k(r)和tuni,进行均匀搜索;
62、将第k帧各个扇区的重要程度wk用来表示第k帧扇区di的空间资源分配结果,将第k帧各个扇区驻留的prt数目nk用来表示第k帧各扇区的时间资源分配结果,pfa,k(r)表示第k帧中各个距离分区的虚警概率,当k=1时,上述所有值为其初始值,并基于初始值对监视空域进行均匀搜索。
63、步骤s42、令k=k+1;
64、步骤s43、提高检测门限,降低各分区的虚警概率,即
65、其中,pfa,k(r)表示第k帧各个距离分区的虚警概率,pfa,k-1(r)表示第k-1帧各个距离分区的虚警概率,表示第k帧和第k-1帧之间虚警概率的变化(k>1)。
66、步骤s44、采用模糊层次分析法fahp算法进行空域资源分配,更新wk;
67、fahp算法的流程具体如下:
68、步骤s441、设定第k阶段在扇区di检测出qi,k个点迹,对于目标点迹p∈{1,2,…,qi,k},从j(j≥2)个属性角度来评定该目标点迹的威胁程度,表示为一个属性集bj∈{b1,…bj}。对目标p的每一个属性值bj进行量测,记为apj,从而组成得到属性值矩阵ai,k。然后对矩阵ai,k进行规范化处理,得到规范化矩阵ri,k,ri,k中的元素rpj可表示为:
69、
70、其中,aj表示矩阵ai,k的第j列元素组成的向量。
71、将属性值做两两比较判断,将因素bj与因素bi相比的重要程度表示为bji,将所有因素按此规则比较后,得到模糊判断矩阵β=(bji)j×j,(i=1,2,…j,j=1,2,…j)。采用0.1~0.9标度法对元素bji给予数量标度,对目标属性进行两两比较,得到模糊判断矩阵b。
72、步骤s442、计算模糊互补判断矩阵的权重;
73、设定模糊判断矩阵b的权重向量为α=[α1,α2,…,αj]t,向量α中的第j个元素αj可定义为:
74、
75、其中,可知同时令得到判断矩阵的特征矩阵为m=(αji)j×j。
76、b和m的相容指数i(b,m)为:
77、
78、若i(b,m)≤tm,tm表示预先设定好的一个参数,则认为判断矩阵满足一致性要求。
79、综合考虑规范化矩阵ri,k和权重向量α,得到扇区di内目标点迹的威胁值ξi,k为:
80、ξi,k=ri,kα (19)
81、将扇区di内目标点迹的量化威胁值结果相叠加,得到扇区di的威胁值为ξi′,k。然后,将各个扇区的威胁值与预先设定好的威胁等级表相比较,得到各个扇区的威胁等级:
82、
83、其中,l0,l1,l2,l3分别表示四个威胁等级,β和γ表示等级阈值,0<β<γ。对每一个扇区进行这样的处理,即可得到wk。
84、考虑目标的距离、速度和各个扇区的目标数量,通过fahp算法得到各个扇区的威胁度值。
85、步骤s45、采用cvx工具箱进行时间资源调度,更新nk;
86、当获取wk后,利用式(15)进行时间资源调度,得到时间资源分配结果。
87、步骤s46、按照优化得到的wk和nk对监视空域进行非均匀搜索,得到检测结果;
88、步骤s47、判断是否满足收敛条件;
89、若连续两帧搜索中得到的点迹信息(目标点迹的数量、位置、速度)一致,说明已成功检测出真实目标,结束算法,输出信号多域资源分配结果;否则返回步骤s42。
90、本发明的有益效果:本发明的方法首先根据相控阵雷达信号接收机处理流程,建立目标回波信号和运动状态模型,通过建立的变虚警检测框架,构建信号空时资源调度模型,利用jbta算法求解优化问题得到下一帧检测中各空域的信号空间、时间资源分配情况,并进行非均匀搜索,最后有效检测出真实目标的点迹,输出信号多域资源分配结果。本发明的方法通过建立变虚警检测框架,根据距离的不同设置不同的虚警概率,减少了虚假目标的同时,提高了远距目标的检测性能,同时加入了信号多域资源调度算法,提出了联合波束和时间资源调度方法,将更多的资源分配到威胁程度更大的空域中,增加了多阶段搜索的收敛速度和检测质量。
- 还没有人留言评论。精彩留言会获得点赞!