一种航行体跨水空介质过程中时变力载荷测量系统
本发明属于机械测量,具体涉及一种航行体跨水空介质过程中时变力载荷测量系统。
背景技术:
1、跨水空介质航行体(trans-media aerial underwater vehicle,tmauv)是指能够自主且多次跨越水空交界面,并可稳定在水中航行和空中飞行的新型航行器。此类航行体首先被应用于掠海飞行武器平台,利用其水下隐蔽性和空中高速、高机动性以提升武器突防能力和攻击成功率。此外,跨水空无人航行体可作为巡航武器进行海上侦察或攻击,相比于传统的水下单介质航行体,其搜索能力具有质的飞跃。随着通信技术的发展,跨水空介质航行器进入民用工程领域,包括远海探测、水质监察、海上搜索和救援、海上通信等。
2、跨介质航行体的研究过程中仍面临一些关键问题亟待深入研究及解决。其中航行体在跨水空介质过程中受到空气、水、空化形成的空泡等多相流场的作用,航行体的时变力载荷变化规律与航行体周围的多相复杂流动现象密切相关。
3、目前在航行体跨介质流体动力学的研究中,多以航行体周围空泡形成发展过程的高速可视化摄影实验研究为主。施红辉(2015)用一级轻气炮为发射装置进行了速度为4.425m/s-82.76m/s的四种不同头型钝体在18°及垂直入水实验,分析了不同工况下空泡产生和发展的特性。侯宇(2020)采用滑膛弹道枪为发射装置,在水箱中沿水下弹道布置压力传感器,分析了弹体以8°入射角高速入水冲击过程的弹道轨迹、喷溅演变和水下压力波传播特征。可以发现,涉及航行体跨介质过程中所受力载荷测量方法精度较低,在水洞中沿弹道布置压力传感器的方法因为弹道的复杂多变误差难以控制,且难以实现航行体完整出入水过程中时变力载荷的测量。为了设计可控、稳定飞行的跨介质航行器,有必要定量测量及研究航行体在跨介质过程中所受到的气动力、水动力等力载荷的实时变化规律,尤其是航行体周围介质变化,空泡形成、发展和变化等复杂流动现象对这种高度时变特性的作用机制。
4、现有航行体跨介质过程中所受力载荷测量方法以在水洞中沿预设弹道布置力测量传感器的方法为主,而因为涉及到多相复杂流动,航行体运动过程中,其弹道多变且难以控制,沿预设弹道布置的力载荷测量传感器给出的数据误差太大。此外,现有的预设弹道测量方案以航行体弹射入水或出水为主,难以实现航行体完整出入水过程中时变力载荷的测量。
技术实现思路
1、为了克服现有测量技术的缺陷和丰富航行体跨介质运动过程所受力载荷特性研究,本发明提供了一种航行体跨水空介质过程中时变力载荷测量系统,采用旋转固定式运动轨迹,可避免弹道多变造成时变力载荷测量时的不可控误差;并通过数据的差值和信号降噪处理获取多相流动作用下,航行体跨介质过程所受实时力载荷数据。同时运动轨迹固定,可实现航行体完整出入水过程中的所受的力载荷测量。
2、一种航行体跨水空介质过程中时变力载荷测量系统,包括数据处理终端(1)、伺服电机(2)、伺服驱动器(4)、应变式力载荷传感器(5)、连杆机构(7)以及透明水箱(9);
3、伺服电机(2)由伺服驱动器(4)控制运行,并通过减速器连接连杆机构(7)前端,以控制其进行旋转运动;连杆机构(7)末端与航行体(8)连接,二者之间安装有应变式力载荷传感器(5);
4、透明水箱(9)内装水,用于提供航行体(8)在水中测试的运动环境;
5、所述应变式力载荷传感器(5)用于实时测量航行体(8)受到的三维度力载荷数据,包括在纯空气场中的三维度力载荷变化数据以及与在纯空气场中相同运动轨迹下,进行完整跨水空介质运动的三维度力载荷变化数据,并由数据处理终端(1)记录;
6、所述数据处理终端(1)用于对纯空气场中的三维度力载荷变化数据及跨水空介质运动的三维度力载荷变化数据,并进行算术平均处理;然后对平均后的两组数据进行差值和信号滤波降噪处理,以提取航行体在跨水空介质过程中所受气、水和空泡作用的时变力载荷数据。
7、较佳的,连杆机构(7)前端和减速器连接方式为通过联轴器的键(10)连接。
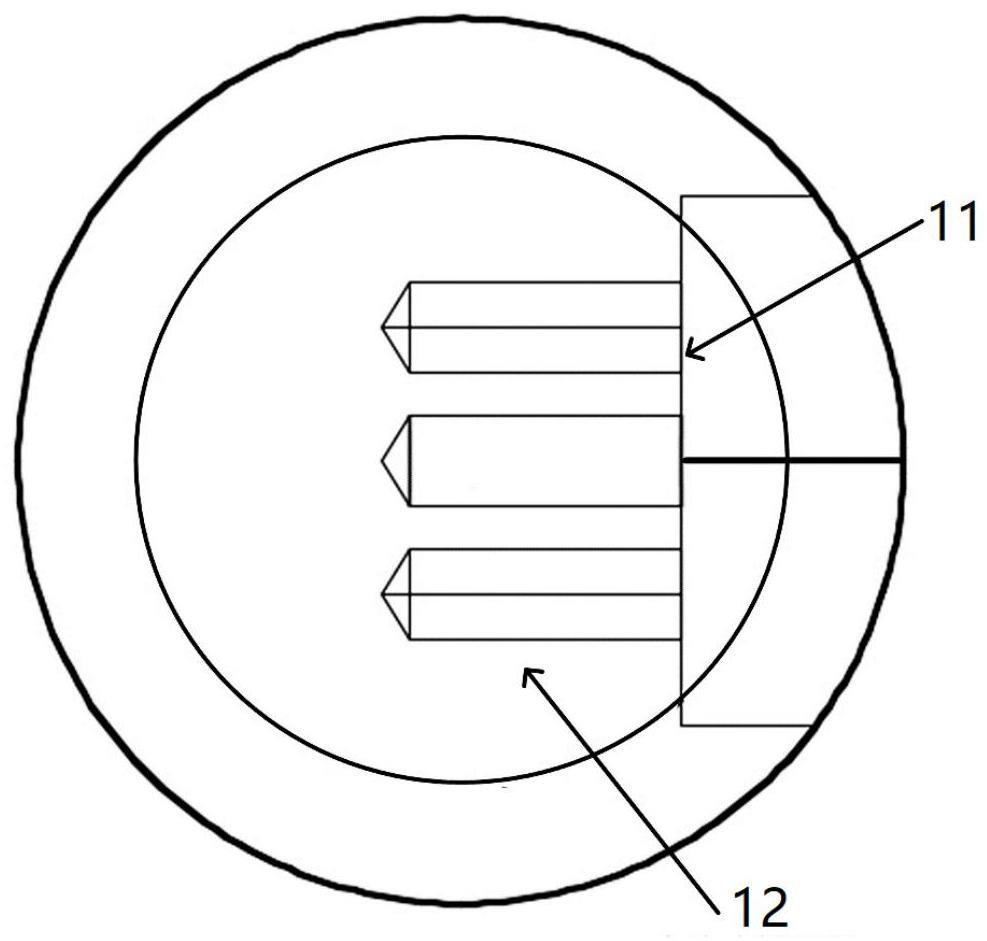
8、较佳的,航行体(8)外形结构的中部位置加工有圆形凹槽(11),圆形凹槽(11)内部平面均匀加工有四个内陷螺纹孔(12);连杆机构(7)末端加工成与的圆形凹槽(11)配合的圆形平面,在其表面对应于内陷螺纹孔(12)位置加工同直径螺纹孔;连杆机构(7)的末端插入圆形凹槽(11),两者的螺纹孔通过螺栓固结。
9、较佳的,所述航行体(8)为前端半圆形体,其直径设为d,后端为与前端半圆直径相同的圆柱体结构,圆柱体高设计为5d,圆柱体高设计为5d;所述圆形凹槽(11)的直径为0.6d,其深度为0.25d。
10、较佳的,透明水箱(9)长度a=42.5d,高度b=10d,宽度与高度相等。
11、较佳的,航行体(8)旋转半径r=18.875d,入水深度h=2.5d。
12、较佳的,应变式力传感器(5)固定在连杆机构(7)上,其与航行体(8)间的距离c=7.5d。
13、较佳的,连杆机构(7)为变长度连杆机构。
14、本发明具有如下有益效果:
15、1)航行体运动轨迹设置为可控的强制旋转运动可实现航行体完整跨介质运动过程中,其所受力/力矩载荷的实时定量测量和获取。可避免不受控抛射入水、跌落入水等跨水空介质实验中难以实现完整跨介质过程,以及航行体运动易偏离预定轨迹造成测点误差较大的缺陷。
16、2)航行体运动速度可按照需求调节伺服驱动器改变;航行体入水深度可通过改变变连杆机构长度控制。由此可简便且稳定获取不同工况下航行体跨介质过程所受时变力载荷特性
17、3)航行体跨水空介质运动时,所受载荷有强烈的时变特性。实验关键是定量获取航行体在空水介质共同作用下的载荷数据。因此,本方法设计两组实验,分别测量航行体单在空气中运动和航行体进行跨介质运动时所受时变力载荷,对所获取的数据进行差值处理,便可定量得出航行体在空水介质作用下的载荷时变特性数据。为进一步提高数据精度,多次重复两组实验后取平均值后差值,并进行信号降噪等处理。
技术特征:
1.一种航行体跨水空介质过程中时变力载荷测量系统,其特征在于,包括数据处理终端(1)、伺服电机(2)、伺服驱动器(4)、应变式力载荷传感器(5)、连杆机构(7)以及透明水箱(9);
2.如权利要求1所述的一种航行体跨水空介质过程中时变力载荷测量系统,其特征在于,连杆机构(7)前端和减速器连接方式为通过联轴器的键(10)连接。
3.如权利要求1所述的一种航行体跨水空介质过程中时变力载荷测量系统,其特征在于,航行体(8)外形结构的中部位置加工有圆形凹槽(11),圆形凹槽(11)内部平面均匀加工有四个内陷螺纹孔(12);连杆机构(7)末端加工成与的圆形凹槽(11)配合的圆形平面,在其表面对应于内陷螺纹孔(12)位置加工同直径螺纹孔;连杆机构(7)的末端插入圆形凹槽(11),两者的螺纹孔通过螺栓固结。
4.如权利要求3所述的一种航行体跨水空介质过程中时变力载荷测量系统,其特征在于,所述航行体(8)为前端半圆形体,其直径设为d,后端为与前端半圆直径相同的圆柱体结构,圆柱体高设计为5d,圆柱体高设计为5d;所述圆形凹槽(11)的直径为0.6d,其深度为0.25d。
5.如权利要求3所述的一种航行体跨水空介质过程中时变力载荷测量系统,其特征在于,透明水箱(9)长度a=42.5d,高度b=10d,宽度与高度相等。
6.如权利要求5所述的一种航行体跨水空介质过程中时变力载荷测量系统,其特征在于,航行体(8)旋转半径r=18.875d,入水深度h=2.5d。
7.如权利要求3所述的一种航行体跨水空介质过程中时变力载荷测量系统,其特征在于,应变式力传感器(5)固定在连杆机构(7)上,其与航行体(8)间的距离c=7.5d。
8.如权利要求1所述的一种航行体跨水空介质过程中时变力载荷测量系统,其特征在于,连杆机构(7)为变长度连杆机构。
技术总结
本发明提供了一种航行体跨水空介质过程中时变力载荷测量系统,采用旋转固定式运动轨迹,可避免弹道多变造成时变力载荷测量时的不可控误差;并通过数据的差值和信号降噪处理获取多相流动作用下,航行体跨介质过程所受实时力载荷数据。同时运动轨迹固定,可实现航行体完整出入水过程中的所受的力载荷测量。
技术研发人员:于勇,刘君遥
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!