一种基于DVL与单信标的深远海海底电缆定位方法
本发明属于水下海底电缆探测领域,具体涉及一种基于dvl与单信标的深远海海底电缆定位方法。
背景技术:
1、近年来,随着可再生能源的发展,海上风电场发电越来越成熟,然而随着海上风电场的发展,其带来的运维问题也越来越突出,其中海底电缆探测与维护是一项非常艰巨的任务,特别时在深远海海域。考虑到水下环境的复杂性和危险性,近年来,水下机器人自主探测越来越多。水下机器人在探测海底电缆的同时,将电缆的破损情况及自身的位置信息发到管控中心进行分析。因此水下机器人的定位准确性决定了海底电缆破损的位置精度。传统方法采用超短基线定位设备实现对水下机器人的的定位,然而,超短基设备的通信距离在水下受限,该设备只能保证几千米范围内的定位精度。在考虑定位范围的同时,基于海洋环境的复杂性,还需要解决传感器噪声问题,以及定位连续性等问题。针对上述问题,本发明提出了一种基于dvl(多普勒计程仪)与单信标的深远海海底电缆定位方法。
技术实现思路
1、发明目的:本发明为了解决深远海海底电缆定位问题,提供一种基于dvl与单信标的深远海海底电缆定位方法。
2、技术方案:本发明提供一种基于dvl与单信标的深远海海底电缆定位方法,包括以下步骤:
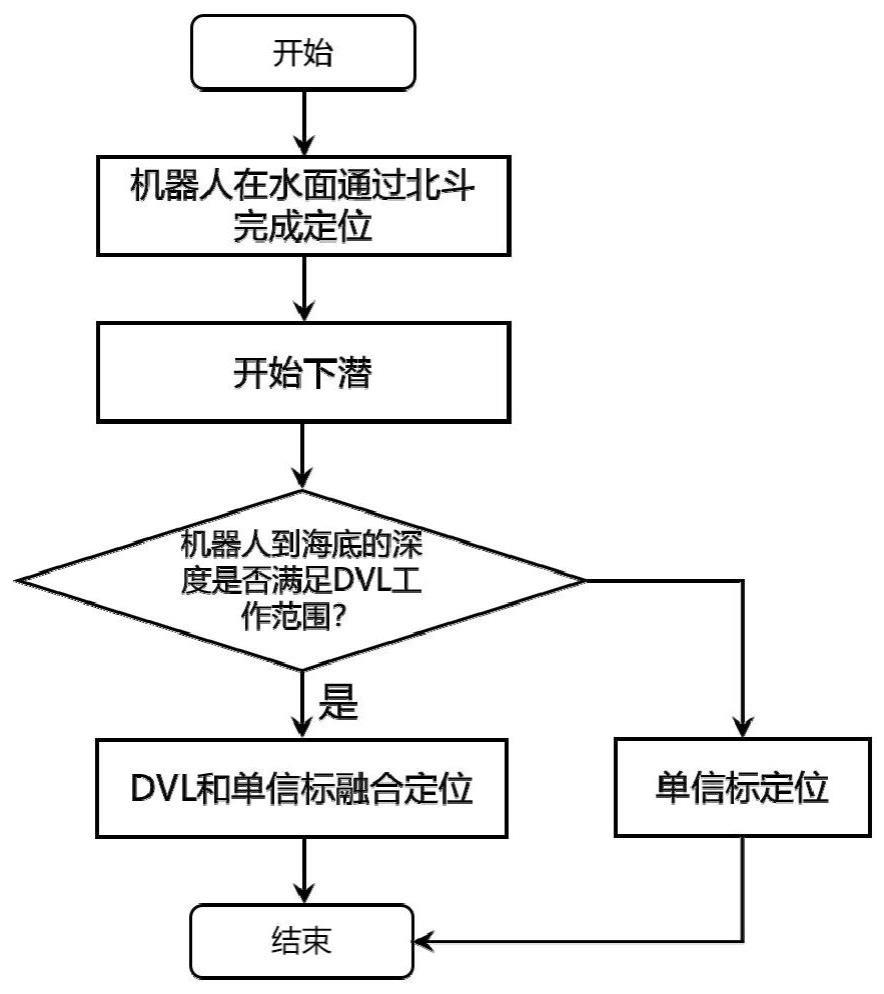
3、(1)海底电缆探测机器人处于水面,通过北斗获取其位置信息;
4、(2)在深海中水层海域采用单信标声学原理及最大熵扩展卡尔曼滤波算法实现对海底电缆探测机器人的定位;
5、(3)考虑dvl测量速度噪声的影响,基于滤波器实现对dvl三轴速度的降噪处理;
6、(4)在海缆探测区域,基于dvl和单信标的混合定位方法,通过平均加权法提高海底电缆的定位精度。
7、进一步地,所述海底电缆探测机器人的位置信息为:
8、pr,k=[lbds λbds hbds]
9、其中,pr,k表示海底电缆探测机器人k时刻的位置,lbds表示北斗定位系统输出的经度、λbds表示北斗定位系统输出的纬度、hbds表示北斗定位系统输出的高度。
10、进一步地,所述步骤(2)实现过程如下:
11、状态一步预测:
12、
13、其中,表示状态向量估计值;fk-1表示非线性状态转移矩阵;ak-1表示转移矩阵,表示如下:
14、
15、xk=[ld,k λd,k vcx vcy]
16、
17、其中,δt表示单信标收发周期;ld,k表示k时刻基于单信标的经度信息;λd,k表示k时刻基于单信标的纬度信息;vcx表示x方向水流速度信息;vcy表示y方向水流速度信息;
18、状态一步预测均方误差:
19、
20、其中,pk-1表示协方差矩阵;qk-1表示系统噪声方差阵;
21、计算残差向量:
22、
23、其中,ek表示k时刻的残差向量;zk表示k时刻的量测向量;hk表示k时刻的量测转移矩阵,具体表示如下:
24、
25、
26、计算权矩阵:
27、
28、其中,σ表示核函数带宽;
29、基于最大熵的量测噪声方差阵:
30、
31、计算扩展卡尔曼滤波增益:
32、
33、其中,kk表示k时刻的滤波增益;rk表示k时刻的量测噪声方差阵;
34、状态估计计算:
35、
36、状态估计均方误差计算:
37、pk=pk-kkhkpk|(k-1)。
38、进一步地,所述步骤(3)实现过程如下:
39、分别把dvl输出的三个方向的速度信息:转换到频域;根据频率中噪声的分布范围自适应设置带通滤波器参数;通过带通滤波器完成对dvl三个方向速度信息的降噪处理。
40、进一步地,所述步骤(4)实现过程如下:
41、在dvl速度信息的基础上计算水下机器人位置:
42、
43、
44、
45、其中,ldr,k表示k时刻基于dvl推算得到的经度信息;λdr,k表示k时刻基于dvl推算得到的纬度信息;hdr,k表示k时刻基于dvl推算得到的高度信息;结合单信标计算信息,实现平均加权求和处理:
46、lk=0.5×ld,k+0.5×ldr,k
47、λk=0.5×λd,k+0.5×λdr,k
48、hk=0.5×ld,k+0.5×hdr,k
49、其中,lk表示水下海底电缆探测机器人k时刻的纬度信息;λk表示水下海底电缆探测机器人k时刻的经度信息;hk表示水下海底电缆探测机器人k时刻的高度信息;最终的水下海底电缆探测机器人的三维位置信息为pr,k=[lk λk hk]。
50、有益效果:与现有技术相比,本发明的有益效果:本发明针对单信标声学定位易受野值干扰问题,在扩展卡尔曼滤波算法的基础上,引入最大熵原理,提出一种最大熵扩展卡尔曼滤波方法,提高了单信标声学定位的抗干扰能力;本发明针对dvl速度噪声问题,引入滤波器,分别对dvl的三个方向的速度信息进行了滤波处理,进一步提高了dvl测量的速度精度;本发明为提高海底海缆定位问题,设计了基于dvl和单信标的融合定位方法,并提出平均加权算法,提高了数据融合定位精度。
技术特征:
1.一种基于dvl与单信标的深远海海底电缆定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于dvl与单信标的深远海海底电缆定位方法,其特征在于,所述海底电缆探测机器人的位置信息为:
3.根据权利要求1所述的一种基于dvl与单信标的深远海海底电缆定位方法,其特征在于,所述步骤(2)实现过程如下:
4.根据权利要求1所述的一种基于dvl与单信标的深远海海底电缆定位方法,其特征在于,所述步骤(3)实现过程如下:
5.根据权利要求1所述的一种基于dvl与单信标的深远海海底电缆定位方法,其特征在于,所述步骤(4)实现过程如下:
技术总结
本发明公开了一种基于DVL与单信标的深远海海底电缆定位方法,首先,海底电缆探测机器人在水面通过北斗卫星导航系统获取准确的位置信息;其次,当海底电缆探测机器人潜入水下时,考虑到此时DVL还无法获取对低速度,采用单信标声学定位完成对水下机器人的位置解算,同时提出一种最大熵扩展卡尔曼滤波算法用于位置解算;最后,当海底电缆探测机器人到达海底电缆附近时,采用DVL和单信标融合定位方法,并通过平均加权法提高海底电缆的定位精度。本发明可以解决深远海海底电缆定位问题,提高海缆探测的定位精度。
技术研发人员:王迪,王冰,黄浩乾,孙世安
受保护的技术使用者:河海大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!