一种长距离隧道场景下的机器人激光定位方法与流程
本发明涉及一种激光定位方法,具体涉及一种长距离隧道场景下的机器人激光定位方法。
背景技术:
1、地下管廊属于有限空间,相比普通场景存在一定人员安全方面的隐患,但是又需要对管廊中的设备进行日常维护巡检。所以使用自动巡检机器人代替人工能有效的保障维护人员自身安全,还能以超过人工巡检的效率24h内高频次巡检。
2、由于管廊中都是十分狭长的长隧道,并且隧道两侧都是一模一样的多截管道,传统的激光导航或者视觉导航在管廊中这种重复度很高、特征又少的场景非常容易导致误差不断积累从而在运动一定距离之后定位偏移丢失。所以业内很少使用轮式机器人在管廊场景进行巡检。
3、现有的管廊场景采用的自动巡检机器人绝大多数都是轨道式机器人,通过在管廊顶部架设轨道安放轨道式移动机器人进行设备巡检。也有很少一部分使用轮式移动机器人进行巡检,但是需要通过在管廊中布设uwb定位模组,或者地面部署磁条、rfid等辅助定位模组并且机器人本体增加相应读取设备进行定位。
4、不管是现有的使用轨道式机器人还是轮式巡检机器人进行隧道巡检都存在一定弊端。轨道机器人的优点在于定位简单,只需要沿着轨道运动,不会跑偏,但是成本相对较高。轨道式机器人虽然机器人本体成本会相对较低,但是在动辄几公里的管廊中要铺设如此长的轨道其材料和人工成本都是很高的。另外在管廊中施工作业部署费时且存在安全方面的隐患。
5、而现有的轮式移动巡检机器人相比轨道式移动机器人本体成本相对较高,同时由于隧道场景带来的轮式机器人导航定位的困难,需要在管廊中部署rfid或者uwb等辅助定位模组以及在机器人上额外增加对应的辅助定位模块的读取设备,相比轨道机器人铺设轨道的成本和时间有一定优势,但是同样需要进行施工部署,仍然不够便利。
技术实现思路
1、为解决现有技术的不足,本发明的目的在于提供一种长距离隧道场景下的机器人激光定位方法。
2、为了实现上述目标,本发明采用如下的技术方案:
3、一种长距离隧道场景下的机器人激光定位方法,于既定位置沿隧道张贴若干反光贴;
4、行走于隧道中的机器人通过激光雷达扫描反光贴,依次获取既定位置处反光贴的既定坐标,并基于既定坐标对机器人进行定位,或修正定位。
5、上述反光贴近隧道内的巡检设备张贴。
6、相邻的上述反光贴的间距为10-20m。
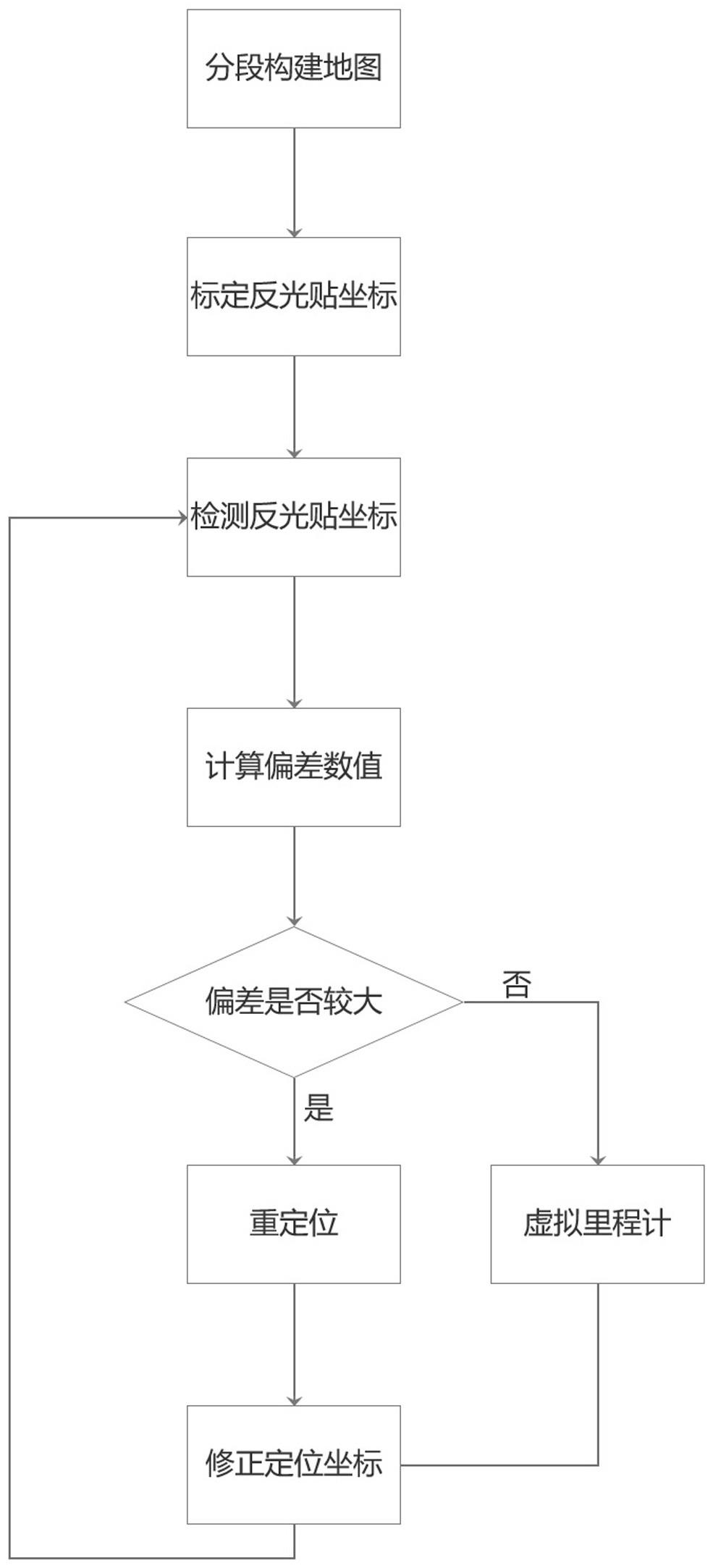
7、还包括预先构建隧道内地图,并在地图中标定反光贴位置,形成既定坐标;
8、行走于隧道中的机器人,在每次扫描到反光贴时查询地图中最近的反光贴的既定坐标,并和当前反光贴坐标进行对比,计算出偏差数值后,对当前机器人的定位位置进行修正。
9、进一步的,上述在地图中标定反光贴位置的方法为:
10、控制机器人在隧道中行走,通过激光雷达扫描的既定位置处的反光贴,选取反光贴张贴高度所在的激光线束,将激光雷达返回光束的反射强度从完全未返回到完全返回分为0-255这256个档位,以纯黑不反光的材质反射率强度为0档,以纯白的高反光板反射率强度为255档。提取激光线束中反射率强度超过200档的部分,若存在连续的高强度反射点即为反光贴;
11、取所有连续的反射点拟合为线段,取线段的中点为反光贴的位置,线段角度为反光贴的方向;基于机器人的当前位置坐标,将坐标从雷达坐标系转换为地图坐标系,获得的地图坐标系中的反光贴坐标即为检测到的反光贴的既定坐标。
12、更进一步的,控制机器人在隧道中行走过程中,对比机器人的实际位置和在地图中的导航定位,当发现机器人的导航定位由于累积误差过大产生偏移时,重新定位纠正导航定位,直至走完隧道。
13、进一步的,当前机器人的定位位置进行修正的方法为:以虚拟值给里程计增加一个数值,为偏差值数值的运动距离。
14、进一步的,当前机器人的定位位置进行修正的方法为:以当前机器人的导航坐标加上偏差值之后的坐标为中心,进行重定位。
15、进一步的,上述地图经分段构建后拼接而成。
16、本发明的有益之处在于:
17、本发明的一种长距离隧道场景下的机器人激光定位方法,具有以下优点:
18、于隧道内部使用轮式移动机器人可以减少轨道铺设的成本,越长的隧道越能节省成本。辅助定位设备抛弃了传统的磁条、rfid、uwb等设备,采用了高反射率的反光胶带,相比之下不需要额外增加读取设备,仅需原本导航机器人上的激光雷达即可进行识别检测,降低了成本,简化机器人结构和重量,降低机器人的能耗。
19、检测距离就等于激光雷达探测距离,相比其他必须在几厘米或者几十厘米内才能检测到的辅助定位设备,能在几米以外就可以检测到反光贴。同时激光雷达本身的探测精度也使得反光贴的定位精度可以达到两厘米以内。
20、部署一条5km长的管廊需要的反光贴成本在1000元左右,部署反光贴耗时约为2人天。相比其他方案,无论是在成本上还是耗时上都有着十倍以上的提升,并且方便增删及修改位置。
21、本发明的激光定位方法,基于若干反光贴具备定位精度高的优势,在存在较大偏差和较小偏差两种情况下可以不同的方式实时修正,且两种修正方式还存在相互纠正的优点,精度高,稳定,低成本,低能耗,具有很强的实用性和广泛的适用性。
技术特征:
1.一种长距离隧道场景下的机器人激光定位方法,其特征在于,于既定位置沿隧道张贴若干反光贴;
2.根据权利要求1所述的激光定位方法,其特征在于,所述反光贴靠近隧道内的巡检设备张贴。
3.根据权利要求1所述的激光定位方法,其特征在于,相邻的所述反光贴的间距为10-20m。
4.根据权利要求1所述的激光定位方法,其特征在于,还包括预先构建隧道内地图,并在地图中于既定位置标定反光贴,形成既定坐标;
5.根据权利要求4所述的激光定位方法,其特征在于,所述在地图中标定反光贴位置的方法为:
6.根据权利要求5所述的激光定位方法,其特征在于,控制机器人在隧道中行走过程中,对比机器人的实际位置和在地图中的导航定位,当发现机器人的导航定位由于累积误差过大产生偏移时,重新定位纠正导航定位,直至走完隧道。
7.根据权利要求4所述的激光定位方法,其特征在于,当前机器人的定位位置进行修正的方法为:以虚拟值给里程计增加一个数值,为偏差值数值的运动距离。
8.根据权利要求4所述的激光定位方法,其特征在于,当前机器人的定位位置进行修正的方法为:以当前机器人的导航坐标加上偏差值之后的坐标为中心,进行重定位。
9.根据权利要求4所述的激光定位方法,其特征在于,所述地图经分段构建后拼接而成。
技术总结
本发明的一种长距离隧道场景下的机器人激光定位方法,于既定位置沿隧道张贴若干反光贴;行走于隧道中的机器人通过激光雷达扫描反光贴,依次获取既定位置处反光贴的既定坐标,并基于既定坐标对机器人进行定位,或修正定位。其采用了高反射率的反光胶带,相比之下不需要额外增加读取设备,仅需原本导航机器人上的激光雷达即可进行识别检测,降低了成本,简化机器人结构和重量,降低机器人的能耗。基于若干反光贴具备定位精度高的优势,在存在较大偏差和较小偏差两种情况下可以不同的方式实时修正,且两种修正方式还存在相互纠正的优点,精度高,稳定,低成本,低能耗,具有很强的实用性和广泛的适用性。
技术研发人员:白小山,刘爽,闵济海
受保护的技术使用者:南京天创电子技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!