一种确定TOF模组光能量的方法、装置、介质及设备与流程
本申请涉及tof模组检测,尤其涉及一种确定tof模组光能量的方法、装置、介质及设备。
背景技术:
1、飞行时间(tof,time-of-flight)模组需要利用垂直腔面发射激光器(vcsel,vertical-cavity surface-emitting laser)提供激光光源。
2、tof模组的预设位置处设计有光传感器,用于检测激光到达预设位置时,光能量是否满足设计需求。如果满足设计需求,说明tof模组的结构设计是合格的,如果不满足设计需求,说明tof模组的结构设计不合格。
3、现有技术中,需要先生产出tof模组样品,对tof模组样品进行检测后才能确定光传感器处的光能量分布是否符合模组要求,进而才能判断tof模组的结构设计是否合理。可以看出,现有技术中确定tof模组光能量的方法必须制备出tof模组样品才能实现,成本较高且效率也不能得到保证。
技术实现思路
1、针对现有技术存在的问题,本发明实施例提供了一种确定tof模组光能量的方法、装置、介质及设备,以解决或者部分解决现有技术中在确定tof模组光能量时,所需成本较高且确定效率也无法得到确保的技术问题。
2、本发明的第一方面,提供一种确定tof模组光能量的方法,所述方法包括:
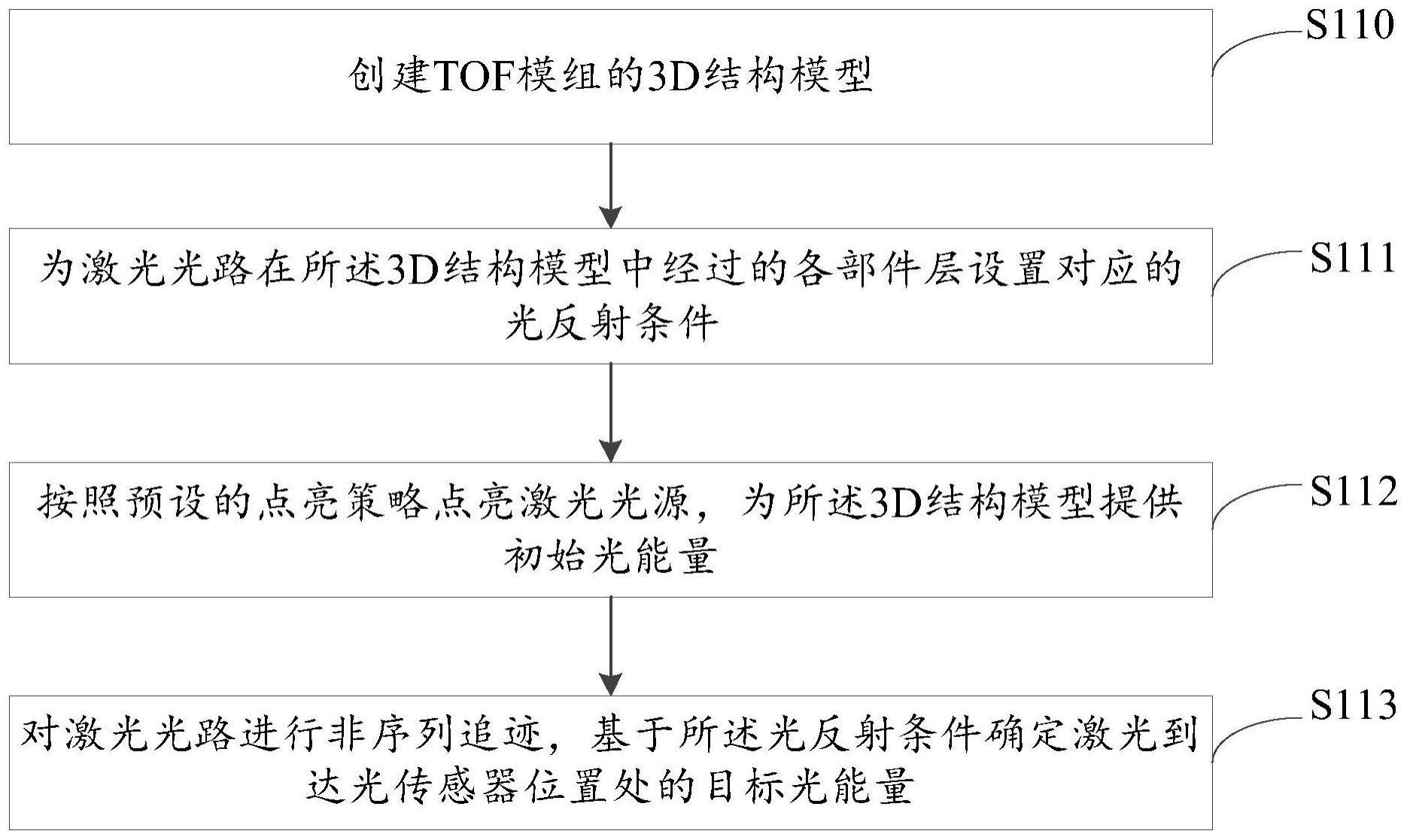
3、创建tof模组的3d结构模型;
4、为激光光路在所述3d结构模型中经过的各部件层设置对应的光反射条件;
5、按照预设的点亮策略点亮激光光源,为所述3d结构模型提供初始光能量;
6、对所述激光光路进行非序列追迹,基于所述光反射条件确定激光到达光传感器位置处的目标光能量。
7、上述方案中,所述为激光光路在所述3d结构模型中经过的各部件层设置对应的光反射条件,包括:
8、确定激光光路在所述3d结构模型中经过的各部件层,所述部件层包括:准直镜层面、pcb板层面、镜筒层面;
9、为所述准直镜层面设置对应的第一反射率及第一吸收率;
10、为所述pcb板层面设置对应的第二反射率及第二吸收率;
11、为所述镜筒层面设置对应的第三反射率及第三吸收率。
12、上述方案中,所述激光光源包括n排光点,所述按照预设的点亮策略点亮激光光源,包括:
13、将所述n排光点分为n/2组;每组光点包括两排光点,每组光点的两排光点之间隔一排光点;每组光点包含的光点排均是不同的;
14、基于预设的初始光能量依次控制相邻组光点点亮,为所述3d结构模型提供初始光能量。
15、上述方案中,所述基于预设的初始光能量依次控制相邻组光点点亮,包括:
16、控制当前组光点开启;
17、当到达预设的启动时长时,控制所述当前组光点关闭,并控制所述当前组光点的下一组光点开启。
18、上述方案中,所述创建tof模组的3d结构模型之后,所述方法还包括:
19、确定光传感器所在的位置;
20、在所述光传感器所在位置上方设置对应的能量探测器,所述能量探测器与所述光传感器之间的距离小于1μm。
21、上述方案中,所述对所述激光光路进行非序列追迹,基于所述光反射条件确定激光到达光传感器位置处的目标光能量,包括:
22、以所述激光光源为初始位置,以各所述光传感器所在的位置为终点位置;
23、确定所述初始位置与所述终点位置之间包含的目标部件层;
24、根据所述目标部件层的反射率及吸收率确定激光到达光传感器位置处的目标光能量。
25、上述方案中,所述根据所述目标部件层的反射率及吸收率确定激光到达光传感器位置处的目标光能量,包括:
26、根据公式q′=q*η1*(1-ω1)*……ηm*(1-ωm)确定所述目标光能量q′;其中,
27、所述q为所述初始光能量,所述m为激光光线到达部件层的序号,所述ηm为激光光线到达的第m个部件层的反射率,所述ωm为激光光线到达的第m个部件层的吸收率。
28、本发明的第二方面,提供一种确定tof模组光能量的装置,所述装置包括:
29、创建单元,用于创建tof模组的3d结构模型;
30、设置单元,用于为激光光路在所述3d结构模型中经过的各部件层设置对应的光反射条件;
31、控制单元,用于按照预设的点亮策略点亮激光光源,为所述3d结构模型提供初始光能量;
32、确定单元,用于对所述激光光路进行非序列追迹,基于所述光反射条件确定激光到达光传感器位置处的目标光能量。
33、本发明的第三方面,提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现第一方面中任一项所述方法的步骤。
34、本发明的第四方面,一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面中任一项所述方法的步骤。
35、本发明实施例提供了一种确定tof模组光能量的方法、装置、介质及设备,方法包括:创建tof模组的3d结构模型;为激光光路在所述3d结构模型中经过的部件层设置对应的光反射条件;按照预设的点亮策略点亮激光光源,为所述3d结构模型提供初始光能量;对激光光路进行非序列追迹,基于所述光反射条件确定激光到达光传感器位置处的目标光能量;如此,通过构建tof模组的3d结构模型,对3d结构模型进行光能量模拟,确定出各个光传感器位置处的目标能量,进而根据目标能量判断tof模组结构是否合格;本申请无需生产出tof模组样品,从而可降低tof模组光能量的确定成本,同时可提高确定效率。
技术特征:
1.一种确定tof模组光能量的方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述为激光光路在所述3d结构模型中经过的各部件层设置对应的光反射条件,包括:
3.如权利要求1所述的方法,其特征在于,所述激光光源包括n排光点,所述按照预设的点亮策略点亮激光光源,包括:
4.如权利要求3所述的方法,其特征在于,所述基于预设的初始光能量依次控制相邻组光点点亮,包括:
5.如权利要求1所述的方法,其特征在于,所述创建tof模组的3d结构模型之后,所述方法还包括:
6.如权利要求1所述的方法,其特征在于,所述对所述激光光路进行非序列追迹,基于所述光反射条件确定激光到达光传感器位置处的目标光能量,包括:
7.如权利要求6所述的方法,其特征在于,所述根据所述目标部件层的反射率及吸收率确定激光到达光传感器位置处的目标光能量,包括:
8.一种确定tof模组光能量的装置,其特征在于,所述装置包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-7任一项所述方法的步骤。
10.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现权利要求1-7任一项所述方法的步骤。
技术总结
本发明实施例提供了一种确定TOF模组光能量的方法、装置、介质及设备,方法包括:创建TOF模组的3D结构模型;为激光光路在所述3D结构模型中经过的部件层设置对应的光反射条件;按照预设的点亮策略点亮激光光源,为所述3D结构模型提供初始光能量;对激光光路进行非序列追迹,基于所述光反射条件确定激光到达光传感器位置处的目标光能量;如此,通过构建TOF模组的3D结构模型,对3D结构模型进行光能量模拟,确定出各个光传感器位置处的目标能量,进而根据目标能量判断TOF模组结构是否合格;本申请无需生产出TOF模组样品,从而可降低TOF模组光能量的确定成本,同时可提高确定效率。
技术研发人员:高峰,杨晓光,刘晨
受保护的技术使用者:昆山丘钛光电科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!