一种半球谐振陀螺平衡模式校准方法
本发明属于半球谐振陀螺校准,尤其涉及一种半球谐振陀螺平衡模式校准方法。
背景技术:
1、半球谐振陀螺仪是一种高精度、高可靠和长寿命的新型固态陀螺仪,它是利用半球壳唇缘的径向振动驻波进动效应来感测基座旋转的一种哥式振动陀螺。它具有很高的测量精度、超强的稳定性和可靠性、良好的抗冲击振动性及温度性能,还特别具有独特的关机抗辐射能力。特别是预期寿命高达15年,是卫星或空间飞行器惯性测量单元、姿态稳定控制的关键部件,在空间应用领域具有独特的优势和广阔的前景。
2、由于对半球谐振陀螺处于全角模式的工作状态进行测试过程中,需要外部输入的角速度足够大(一般要求大于10°),才能够有效激励半球谐振陀螺处于全角模式时内部的环向不均匀误差。但是,现有转台产生的角速度太小,难以满足上述的激励需求,导致半球谐振陀螺全角模式下测试精度低。
技术实现思路
1、本发明的目的是提供一种半球谐振陀螺平衡模式校准方法,通过自激励方法为半球谐振陀螺全角模式下提供大动态范围输入激励信号,替代传统外部转台输入的信号,极大地促进了半球谐振陀螺全角模式的检测便捷性和免拆卸自主标定。
2、本发明采用以下技术方案:一种半球谐振陀螺平衡模式校准方法,包括以下步骤:
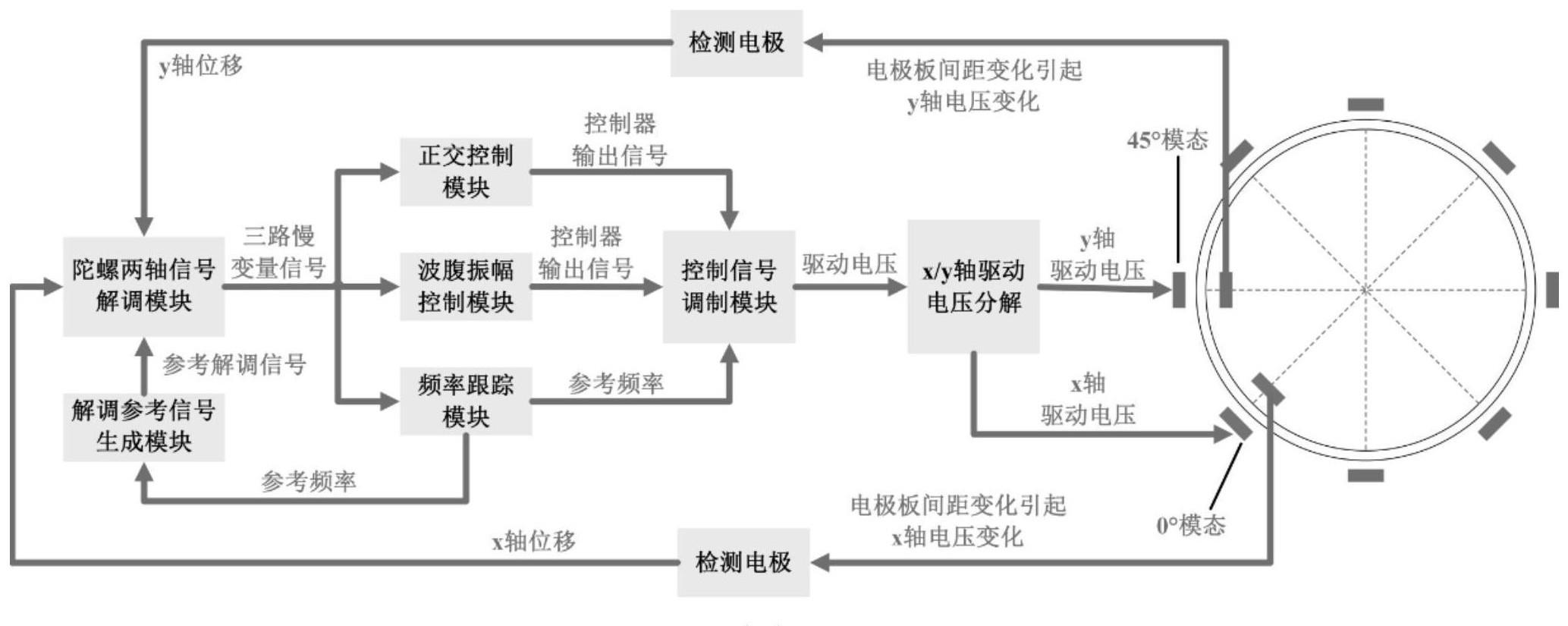
3、获取检测电极的x轴电压值和y轴电压值,并分别解算得到检测电极处谐振子的x轴第一位移值和y轴第一位移值;
4、基于x轴第一位移值和y轴第一位移值、以及前一时刻的同相解调参考信号和正交解调参考信号生成波腹轴信号、波节轴信号、进动角解算信号和频差解算信号;
5、根据波腹轴信号、波节轴信号、进动角解算信号和频差解算信号计算x轴驱动力和y轴驱动力;
6、基于x轴驱动力和y轴驱动力计算x轴第二位移值和y轴第二位移值;
7、根据x轴第一位移值、y轴第一位移值、x轴第二位移值和y轴第二位移值对半球谐振陀螺进行校准。
8、进一步地,基于x轴第一位移值和y轴第一位移值、以及前一时刻的同相解调参考信号和正交解调参考信号生成进动角解算信号包括;
9、基于x轴第一位移值和y轴第一位移值、以及前一时刻的同相解调参考信号和正交解调参考信号生成x轴同相振幅慢变量sx、y轴同相振幅慢变量sy、x轴正交振幅慢变量cx和y轴正交振幅慢变量cy;
10、根据sx、sy、cx和cy计算得到第一进动角信号sθ和第二进动角信号cθ;
11、根据第一进动角信号sθ和第二进动角信号cθ解算得到进动角解算信号θ。
12、进一步地,基于x轴第一位移值和y轴第一位移值、以及前一时刻的同相解调参考信号和正交解调参考信号生成x轴同相振幅慢变量sx、y轴同相振幅慢变量sy、x轴正交振幅慢变量cx和y轴正交振幅慢变量cy包括:
13、
14、其中,x为x轴第一位移值,y为y轴第一位移值,vs为前一时刻的同相解调参考信号,vc前一时刻的正交解调参考信号,lpf()为半球谐振陀螺中的频率跟踪算法。
15、进一步地,根据sx、sy、cx和cy计算得到第一进动角信号sθ和第二进动角信号cθ包括:
16、
17、进一步地,根据第一进动角信号sθ和第二进动角信号cθ解算得到进动角解算信号θ包括:
18、
19、进一步地,根据波腹轴信号、波节轴信号、进动角解算信号和频差解算信号计算x轴驱动力和y轴驱动力包括:
20、
21、其中,fx为x轴驱动力,fy为y轴驱动力,fa为波腹轴信号e的幅值控制力慢变量,θ为进动角解算信号,ωr为前一时刻的参考频率,t为时间,fq为波节轴信号的正交控制力慢变量,k为谐振子振型的进动因子且为常量,ω为自定义输入角速度值,cx为x轴正交振幅慢变量,cy为y轴正交振幅慢变量。
22、进一步地,基于x轴驱动力和y轴驱动力计算x轴第二位移值和y轴第二位移值包括:
23、
24、其中,为谐振子的震动阻尼,ωx为半球谐振陀螺大刚度轴对应的大刚度系数,ωy为半球谐振陀螺小刚度轴对应的小刚度系数,x′为x轴第二位移值,为x′对应的径向速度,为x′对应的径向加速度,y′为y轴第二位移值,为y′对应的径向速度,为y′对应的径向加速度。
25、本发明的另一种技术方案:一种半球谐振陀螺平衡模式校准装置,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述的一种半球谐振陀螺平衡模式校准方法。
26、本发明的有益效果是:本发明通过施加外部激励电压信号来对半球谐振陀螺进行误差校准,将激励电压信号转换为x轴驱动力和y轴驱动力,在根据x轴驱动力和y轴驱动力生成位移值信号,最后根据初始位移值信号和生成位移值信号比较完成半球谐振陀螺的校准,促进了半球谐振陀螺全角模式的检测便捷性和免拆卸自主标定。
技术特征:
1.一种半球谐振陀螺平衡模式校准方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种半球谐振陀螺平衡模式校准方法,其特征在于,基于所述x轴第一位移值和y轴第一位移值、以及前一时刻的同相解调参考信号和正交解调参考信号生成进动角解算信号包括;
3.如权利要求2所述的一种半球谐振陀螺平衡模式校准方法,其特征在于,基于所述x轴第一位移值和y轴第一位移值、以及前一时刻的同相解调参考信号和正交解调参考信号生成x轴同相振幅慢变量sx、y轴同相振幅慢变量sy、x轴正交振幅慢变量cx和y轴正交振幅慢变量cy包括:
4.如权利要求3所述的一种半球谐振陀螺平衡模式校准方法,其特征在于,根据sx、sy、cx和cy计算得到第一进动角信号sθ和第二进动角信号cθ包括:
5.如权利要求4所述的一种半球谐振陀螺平衡模式校准方法,其特征在于,根据第一进动角信号sθ和第二进动角信号cθ解算得到进动角解算信号θ包括:
6.如权利要求2-5任一所述的一种半球谐振陀螺平衡模式校准方法,其特征在于,根据所述波腹轴信号、波节轴信号、进动角解算信号和频差解算信号计算x轴驱动力和y轴驱动力包括:
7.如权利要求6所述的一种半球谐振陀螺平衡模式校准方法,其特征在于,基于所述x轴驱动力和y轴驱动力计算x轴第二位移值和y轴第二位移值包括:
8.一种半球谐振陀螺平衡模式校准装置,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,其特征在于,处理器执行计算机程序时实现权利要求1-7任一所述的一种半球谐振陀螺平衡模式校准方法。
技术总结
本发明公开了一种半球谐振陀螺平衡模式校准方法,获取检测电极的x轴电压值和y轴电压值,并分别解算得到检测电极处谐振子的x轴第一位移值和y轴第一位移值;基于x轴第一位移值和y轴第一位移值、以及前一时刻的同相解调参考信号和正交解调参考信号生成波腹轴信号、波节轴信号、进动角解算信号和频差解算信号;根据波腹轴信号、波节轴信号、进动角解算信号和频差解算信号计算x轴驱动力和y轴驱动力;基于x轴驱动力和y轴驱动力计算x轴第二位移值和y轴第二位移值;根据x轴第一位移值、y轴第一位移值、x轴第二位移值和y轴第二位移值对半球谐振陀螺进行校准;极大地促进了半球谐振陀螺全角模式的检测便捷性和免拆卸自主标定。
技术研发人员:王小旭,李华,史信达,卢乾波,晏恺晨,刘明雍,张军岭,李鹏飞
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!