车辆位姿的确定方法、装置、设备及存储介质与流程
本公开实施例涉及自动化控制,尤其涉及一种车辆位姿的确定方法、装置、设备及存储介质。
背景技术:
1、可移动工程机械设备在进行无人自主作业过程中,需要对自身在工作场景中的位置、姿态进行定位。由于室外工作场景具备良好的全球定位系统(globalpositioningsystem,gps)信号,因此室外场景通常采用gps-实时动态差分技术(real-timekinematic,rtk)进行定位;由于室内或半室内工作场景不具备良好的gps信号,因此通常采用激光同步定位与地图构建(simultaneouslocalization andmapping,slam)技术进行定位。
2、在激光slam技术中,首先离线构建好点云地图,作业中进行基于地图的实时定位。实时定位有两种方式,一种方式是基于场景点云的激光slam定位方法,依靠行驶场景的实时激光点云与地图点云进行配准,从而反推出自车位置及姿态。这种单纯依靠点云配准的方式,整个slam系统的定位稳定性差,难以实际落地,因此出现第二种实时定位方式,即基于路标的激光slam定位方法,是在场景许多关键位置,布置一些针对激光雷达的高亮反光板,称为路标或定位标志,依靠在行驶场景的实时激光点云中检测到多个定位标志的位置,从而反推出自车位置及姿态。
3、然而,现有的定位标志检测方案中具有如下两点不足:
4、(1)当工作场景结构很复杂的情况下,为了适应从不同方向交叉路口能检测到路标,可能出现多个定位标志相互邻近的情况,此时一个感兴趣区域(regionofinterest,roi)内有目标定位标志与非目标定位标志并存的现象,从而可能发生错误检测到非目标定位标志的问题,导致产生定位偏差较大。
5、(2)当定位标志旁边出现其它对激光点高反光的平面时,例如装载机的铲斗抬升出现在激光雷达视野,并与附近的定位标志邻近,可能发生错误检测到这些高反光平面,误作为目标定位标志输出,从而导致定位偏差较大。
技术实现思路
1、本公开实施例提供一种车辆位姿的确定方法、装置、设备及存储介质,可以提高定位标志的检测精度,从而提高车辆位姿的检测精度。
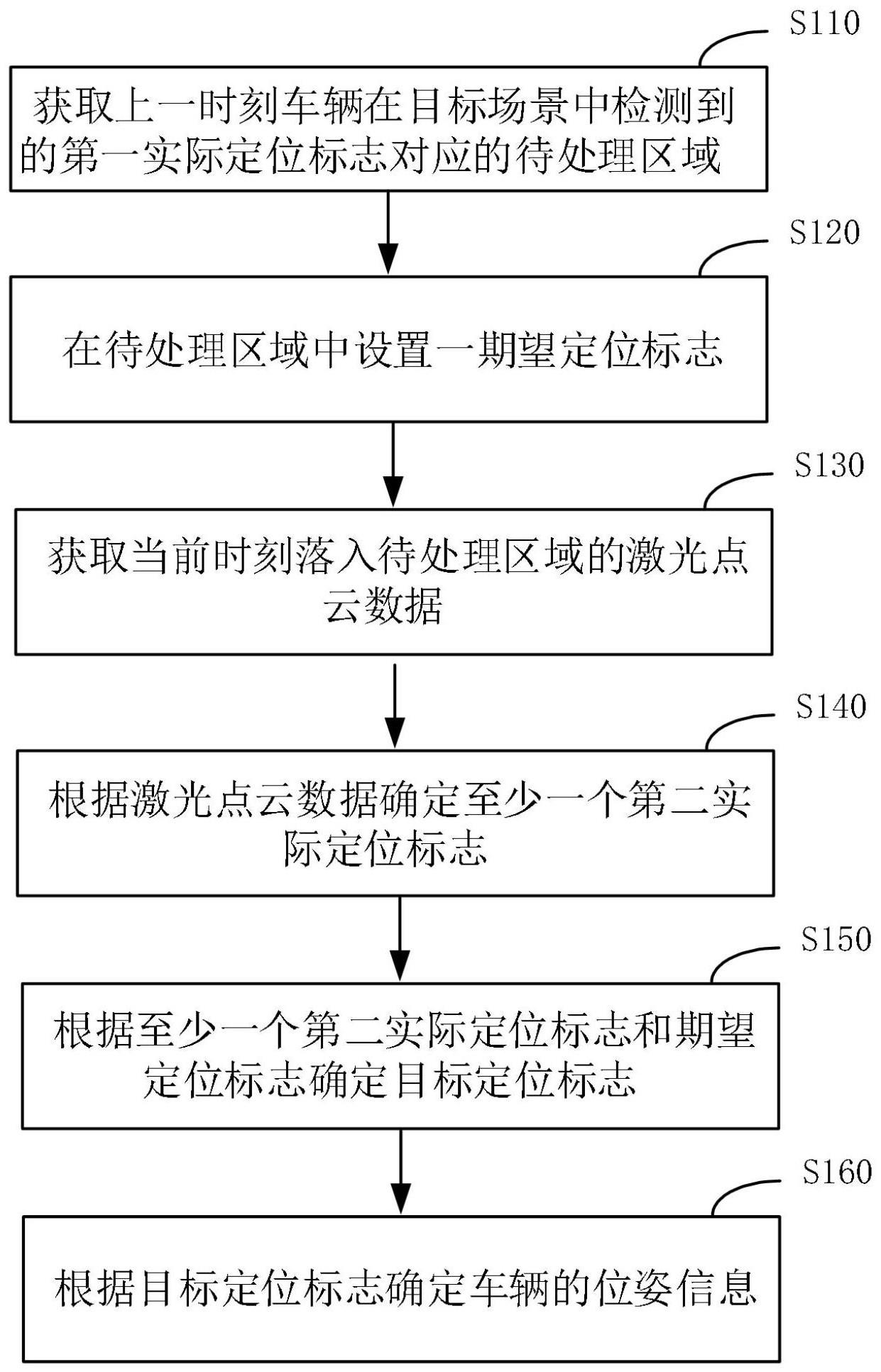
2、第一方面,本公开实施例提供了一种车辆位姿的确定方法,包括:获取上一时刻车辆在目标场景中检测到的第一实际定位标志对应的待处理区域;在所述待处理区域中设置一期望定位标志;获取当前时刻落入所述待处理区域的激光点云数据;根据所述激光点云数据确定至少一个第二实际定位标志;根据所述至少一个第二实际定位标志和所述期望定位标志确定目标定位标志;根据所述目标定位标志确定所述车辆的位姿信息。
3、第二方面,本公开实施例还提供了一种车辆位姿的确定装置,包括:待处理区域获取模块,用于获取上一时刻车辆在目标场景中检测到的第一实际定位标志对应的待处理区域;期望定位标志设置模块,用于在所述待处理区域中设置一期望定位标志;激光点云数据获取模块,用于获取当前时刻落入所述待处理区域的激光点云数据;第二实际定位标志确定模块,用于根据所述激光点云数据确定至少一个第二实际定位标志;目标定位标志确定模块,用于根据所述至少一个第二实际定位标志和所述期望定位标志确定目标定位标志;位姿信息确定模块,用于根据所述目标定位标志确定所述车辆的位姿信息。
4、第三方面,本公开实施例还提供了一种电子设备,所述电子设备包括:
5、一个或多个处理器;
6、存储装置,用于存储一个或多个程序,
7、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如本公开实施例所述的车辆位姿的确定方法。
8、第四方面,本公开实施例还提供了一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如本公开实施例所述的车辆位姿的确定方法。
9、本公开实施例的技术方案,通过获取上一时刻车辆在目标场景中检测到的第一实际定位标志对应的待处理区域;在待处理区域中设置一期望定位标志;获取当前时刻落入待处理区域的激光点云数据;根据激光点云数据确定至少一个第二实际定位标志;根据至少一个第二实际定位标志和期望定位标志确定目标定位标志;根据目标定位标志确定车辆的位姿信息。本公开实施例,通过落入待处理区域的激光点云数据确定至少一个第二实际定位标志,并根据至少一个第二实际定位标志和期望定位标志确定目标定位标志的方式,可以提高定位标志的检测效果,从而提高车辆在目标场景中移动时的定位稳定性。
技术特征:
1.一种车辆位姿的确定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,获取上一时刻车辆在目标场景中检测到的第一实际定位标志对应的待处理区域,包括:
3.根据权利要求1所述的方法,其特征在于,根据所述激光点云数据确定至少一个第二实际定位标志,包括:
4.根据权利要求3所述的方法,其特征在于,根据所述前景点云数据确定至少一个第二实际定位标志,包括:
5.根据权利要求1所述的方法,其特征在于,根据所述至少一个第二实际定位标志和所述期望定位标志确定目标定位标志,包括:
6.根据权利要求5所述的方法,其特征在于,所述定位标志平面的属性包括:法向量和尺寸。
7.根据权利要求6所述的方法,其特征在于,将所述第二实际定位标志平面的属性和所述期望定位标志平面的属性进行比较,获得比较结果,包括:
8.一种车辆位姿的确定装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如权利要求1-7中任一所述的车辆位姿的确定方法。
技术总结
本公开实施例提供了一种车辆位姿的确定方法、装置、设备及存储介质。该方法包括:通过获取上一时刻车辆在目标场景中检测到的第一实际定位标志对应的待处理区域;在待处理区域中设置一期望定位标志;获取当前时刻落入待处理区域的激光点云数据;根据激光点云数据确定至少一个第二实际定位标志;根据至少一个第二实际定位标志和期望定位标志确定目标定位标志;根据目标定位标志确定车辆的位姿信息。本公开实施例,通过落入待处理区域的激光点云数据确定至少一个第二实际定位标志,并根据至少一个第二实际定位标志和期望定位标志确定目标定位标志的方式,可以提高定位标志的检测效果,从而提高车辆在目标场景中移动时的定位稳定性。
技术研发人员:刘平,周文彬,孙金泉,蔡登胜
受保护的技术使用者:广西柳工机械股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!