用于工程设备的吊臂旁弯检测系统的制作方法
本发明涉及工程设备,具体地涉及一种用于工程设备的吊臂旁弯检测系统。
背景技术:
1、吊臂旁弯是指工程设备(如起重机)吊臂全伸、起吊重物的过程中,重物离地稳定后,会出现重物中心偏离基本臂纵向中心线的现象。吊臂旁弯参数是评价工程设备吊载安全性、可靠性的关键参数之一,吊臂旁弯值过大,工程设备吊载重心在水平方向会发生明显偏移,导致工程设备吊载能力下降,严重时还会出现断臂、翻车等安全事故。目前行业内对吊臂旁弯的检测方式有2种:一种是通过在室外吊载重物,通过测量重物中心的偏移量来确定旁弯值,该种方式存在精度低,操作步骤复杂繁琐,效率低、强度大,且旁弯值受太阳直射、风载等环境因素影响较大的缺点;另一种是通过发射信号探测基本臂、末端伸缩节臂之间的距离,并通过计算得出吊臂旁弯值,这种检测方式基于产品进行搭载,主要用于工程设备在实际工况中的报警及动作限制,无法对每节伸缩臂单节旁弯、相对旁弯进行检测,并且发现旁弯值过大时,调整难度也大,无法实现全过程管控。
技术实现思路
1、本发明的目的是为了提供一种用于工程设备的吊臂旁弯检测系统,该用于工程设备的吊臂旁弯检测系统具有检测方法简单,效率高,检测结果更精确的优点。
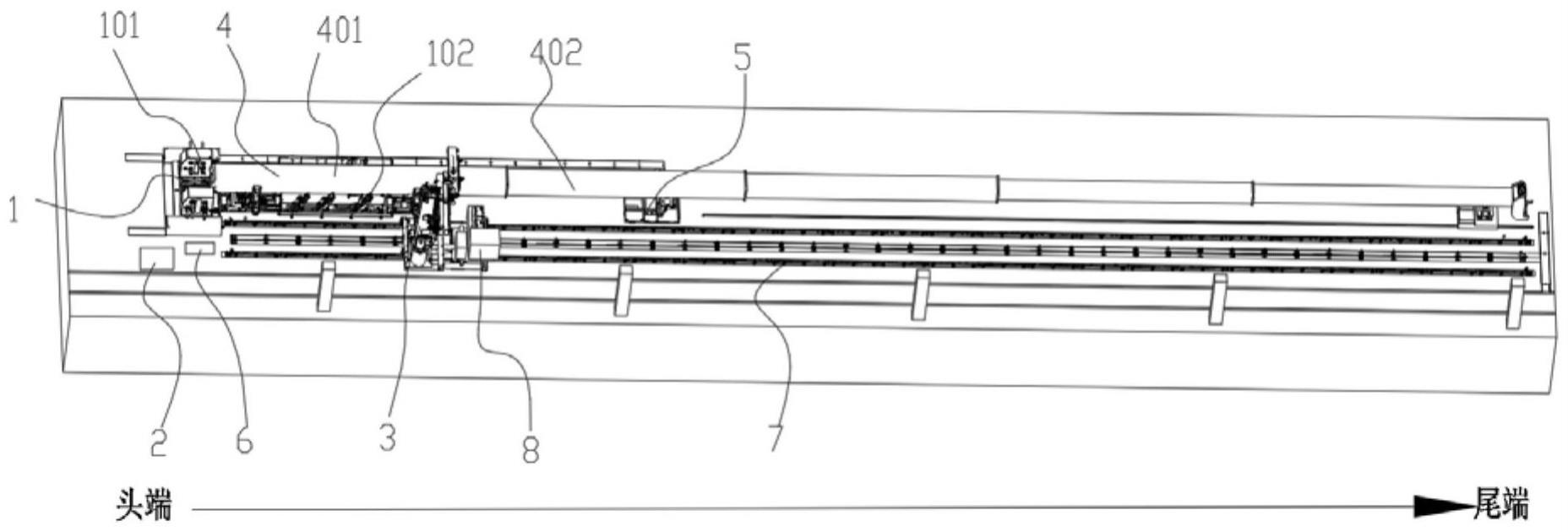
2、为了实现上述目的,本发明提供一种用于工程设备的吊臂旁弯检测系统,吊臂旁弯检测系统包括:
3、吊臂固定装置;
4、驱动装置,用于驱动吊臂上的各个节臂沿轴向伸展开;
5、旁弯检测装置,设置在吊臂的一侧并可沿吊臂的轴向移动;
6、控制器,和吊臂固定装置、驱动装置以及旁弯检测装置通信连接并被配置成:
7、控制吊臂固定装置固定住吊臂的头端;
8、控制驱动装置驱动吊臂的各个节臂沿轴向伸展开;
9、控制旁弯检测装置沿吊臂的轴向间歇性移动并对各个节臂相对两侧的多个预设节点位置进行旁弯检测,以确定旁弯检测数据集合。
10、在本发明的实施例中,控制旁弯检测装置沿吊臂的轴向间歇性移动并对各个节臂相对两侧的多个预设节点位置进行旁弯检测,以确定旁弯检测数据集合包括:
11、控制旁弯检测装置对各个节臂相对两侧的多个预设节点位置进行旁弯检测,以确定各个节臂各自对应的基准距离集合;
12、对节臂的基准距离集合进行单节旁弯数据处理,以确定单节旁弯数据;
13、对各个节臂的基准距离集合进行相对旁弯数据处理,以确定相对旁弯数据;
14、根据单节旁弯数据和相对旁弯数据确定旁弯检测数据集合。
15、在本发明的实施例中,根据单节旁弯数据和相对旁弯数据确定旁弯检测数据集合包括:
16、对各个节臂的基准距离集合进行绝对旁弯数据处理,以确定绝对旁弯数据;
17、根据单节旁弯数据、相对旁弯数据以及绝对旁弯数据确定旁弯检测数据集合。
18、在本发明的实施例中,控制旁弯检测装置对各个节臂相对两侧的多个预设节点位置进行旁弯检测,以确定各个节臂各自对应的基准距离集合包括:
19、控制旁弯检测装置移动到各个节臂的头端,并分别检测头端的第一预设节点位置、第二预设节点位置与测量基准之间的直线距离,以获取第一基准距离和第二基准距离,第一预设节点位置和第二预设节点位置分别位于吊臂相对的两侧;
20、控制旁弯检测装置移动到各个节臂的尾端,并分别检测尾端的第三预设节点位置、第四预设节点位置与测量基准之间的直线距离,以获取第三基准距离和第四基准距离,第三预设节点位置和第四预设节点位置分别位于吊臂相对的两侧;
21、根据第一基准距离、第二基准距离、第三基准距离和第四基准距离确定基准距离集合。
22、在本发明的实施例中,对节臂的基准距离集合进行单节旁弯数据处理,以确定单节旁弯数据包括:
23、基于各个节臂的第一基准距离、第二基准距离计算各个节臂的第一预设中心位置点与测量基准之间的第五基准距离;
24、基于各个节臂的第三基准距离、第四基准距离计算各个节臂的第二预设中心位置点与测量基准之间的第六基准距离;
25、基于第五基准距离和第六基准距离计算出各个节臂的单节旁弯数据。
26、在本发明的实施例中,对各个节臂的基准距离集合进行相对旁弯数据处理,以确定相对旁弯数据包括:
27、确定相邻两个节臂中上游端的节臂的基准中心线斜率;
28、获取相邻两个节臂中上游端的节臂的第五基准距离;
29、获取相邻两个节臂中下游端的节臂的第六基准距离;
30、获取相邻两个节臂中上游端的节臂的第一长度和下游端的节臂的第二长度;
31、根据基准中心线斜率、第五基准距离、第六基准距离、第一长度和第二长度计算相对旁弯数据。
32、在本发明的实施例中,确定相邻两个节臂中上游端的节臂的基准中心线斜率包括:
33、根据以下公式计算基准中心线斜率:
34、k1=(x12’-x11’)/s1
35、其中,k1为基准中心线斜率;x12’为相邻两个节臂中上游端的节臂的第六基准距离;x11’为相邻两个节臂中上游端的节臂的第五基准距离;s1为第一长度。
36、在本发明的实施例中,根据基准中心线斜率、第五基准距离、第六基准距离、第一长度和第二长度计算相对旁弯数据包括:
37、根据以下公式计算相对旁弯数据:
38、p相对=x22’-{k1*(s1+s2)+x11’}
39、其中,p相对为相对旁弯数据;x22’为相邻两个节臂中下游端的节臂的第六基准距离;s2为第二长度。
40、在本发明的实施例中,根据各个节臂的基准距离集合计算绝对旁弯数据包括:
41、根据以下公式计算绝对旁弯数据:
42、p绝对=xn2-{k11*(s1+s2+…+sn)+x11}
43、其中,p绝对为绝对旁弯数据;xn2为吊臂上第n节节臂的第六基准距离;k11为第一节节臂的基准中心线斜率;s1为吊臂上第一节节臂的长度;s2为吊臂上第二节节臂的长度;sn为吊臂上第n节节臂的长度;x11为吊臂上第一节节臂的第五基准距离。
44、在本发明的实施例中,吊臂旁弯检测系统还包括和控制器通信连接的显示设备,控制器还被配置成:
45、在确定旁弯检测数据集合后,控制显示设备显示旁弯检测数据集合。
46、通过上述技术方案,该吊臂旁弯检测系统包括吊臂固定装置、驱动装置、旁弯检测装置和控制器,控制器被配置成:控制吊臂固定装置固定住吊臂的头端;控制驱动装置驱动吊臂的各个节臂沿轴向伸展开;控制旁弯检测装置沿吊臂的轴向间歇性移动并对各个节臂相对两侧的多个预设节点位置进行旁弯检测,以确定旁弯检测数据集合。该吊臂旁弯检测系统能自动对吊臂进行旁弯检测,相比现有技术中的旁弯检测技术,检测精度更精确、直观,自动化程度更高,还能避免太阳直射、风载等环境因素对检测结果的影响。
技术特征:
1.一种用于工程设备的吊臂旁弯检测系统,其特征在于,所述吊臂旁弯检测系统包括:
2.根据权利要求1所述的用于工程设备的吊臂旁弯检测系统,其特征在于,所述控制所述旁弯检测装置(3)沿所述吊臂(4)的轴向间歇性移动并对各个所述节臂相对两侧的多个预设节点位置进行旁弯检测,以确定旁弯检测数据集合包括:
3.根据权利要求2所述的用于工程设备的吊臂旁弯检测系统,其特征在于,所述根据所述单节旁弯数据和所述相对旁弯数据确定所述旁弯检测数据集合包括:
4.根据权利要求3所述的用于工程设备的吊臂旁弯检测系统,其特征在于,所述控制所述旁弯检测装置(3)对各个所述节臂相对两侧的多个预设节点位置进行旁弯检测,以确定各个所述节臂各自对应的基准距离集合包括:
5.根据权利要求4所述的用于工程设备的吊臂旁弯检测系统,其特征在于,所述对所述节臂的基准距离集合进行单节旁弯数据处理,以确定单节旁弯数据包括:
6.根据权利要求5所述的用于工程设备的吊臂旁弯检测系统,其特征在于,所述对各个所述节臂的基准距离集合进行相对旁弯数据处理,以确定相对旁弯数据包括:
7.根据权利要求6所述的用于工程设备的吊臂旁弯检测系统,其特征在于,所述确定相邻两个所述节臂中上游端的所述节臂的基准中心线斜率包括:
8.根据权利要求7所述的用于工程设备的吊臂旁弯检测系统,其特征在于,所述根据所述基准中心线斜率、所述第五基准距离、所述第六基准距离、所述第一长度和所述第二长度计算所述相对旁弯数据包括:
9.根据权利要求8所述的用于工程设备的吊臂旁弯检测系统,其特征在于,所述根据各个所述节臂的基准距离集合计算绝对旁弯数据包括:
10.根据权利要求1-9中任意一项所述的用于工程设备的吊臂旁弯检测系统,其特征在于,所述吊臂旁弯检测系统还包括和所述控制器(8)通信连接的显示设备,所述控制器(8)还被配置成:
技术总结
本发明公开了一种用于工程设备的吊臂旁弯检测系统,该吊臂旁弯检测系统包括:吊臂固定装置;驱动装置,用于驱动吊臂上的各个节臂沿轴向伸展开;旁弯检测装置,设置在吊臂的一侧并可沿吊臂的轴向移动;控制器,和吊臂固定装置、驱动装置以及旁弯检测装置通信连接并被配置成:控制吊臂固定装置固定住吊臂的头端;控制驱动装置驱动吊臂的各个节臂沿轴向伸展开;控制旁弯检测装置沿吊臂的轴向间歇性移动并对各个节臂相对两侧的多个预设节点位置进行旁弯检测,以确定旁弯检测数据集合。该用于工程设备的吊臂旁弯检测系统具有检测方法简单,效率高,检测结果更精确的优点。
技术研发人员:陈泽,陈铁坚,刘玮,陈明智,邓伯春
受保护的技术使用者:中联重科股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!