一种基于马氏距离和Pointpillars的雨雪天气激光雷达目标检测方法
本发明涉及一种检测方法,具体涉及一种基于马氏距离和pointpillars的雨雪天气激光雷达目标检测方法,属于三维信息感知与识别。
背景技术:
1、在自动驾驶领域,激光雷达是环境感知方面重要的传感器之一,它通过发射激光束并接收反射的光束来获取点云坐标以及反射强度信息,通过算法处理,获取的点云信息能用于三维目标检测与跟踪;受制于原理的约束,激光雷达的性能会受到雨雪,大雾等恶劣天气的严重影响。尤其在雨雪天气,雨雪等较大的颗粒会阻碍激光束的发射并造成反射率的改变,也会给点云数据带来较大的噪声,因此提高雨雪天气激光雷达检测精度有着重要的意义。
2、目前雨雪天气的目标检测方法可以分为两大类:一种是基于全局基于深度学习的目标检测方法;二是以滤波检测分步进行为代表的检测方法。全局深度学习的方法通过针对天气特征优化网络结构,通过大量数据学习,通过一个网络整体输出目标检测结果,目前还没有一个相对成熟的解决方案,缺点也很明显,由于天气等物理环境对于激光雷达的影响具有随机性,全局网络结构的方法泛化能力较差。第二种是通过滤波检测分步走为代表的检测算法,首先对雨雪噪点进行滤波再送入检测算法输出识别结果,适用性较强,不依赖于数据学习,主要通过对点云物理特性分析,直接在原始点云数据上进行处理来实现滤波;包括统计滤波(sor),体素滤波,离群点滤波(ror),动态离群点滤波(dror),以离群点滤波为主的滤波方法优点是处理速度较快,可以达到实时处理的效果,缺点是在滤除雨雪噪点的同时将远处点云信息丢失,忽略点云的噪声的协方差信息以及分布情况,而马氏距离可以考虑到多变量之间的异常检测,对于离群点具有更好的判别性能。目前大多数的激光雷达检测算法在雨雪天气的表现都较差,因此,研究一种适用于雨雪天气检测算法是十分有必要的。
技术实现思路
1、本发明正是针对现有技术中存在的问题,提供一种基于马氏距离和pointpillars的雨雪天气激光雷达目标检测方法,该技术方案提出了一种基于马氏距离和pointpillars的雨雪天气激光雷达目标检测方法,其可提高雨雪天三维目标检测精度,同时能实现较快的处理速度。
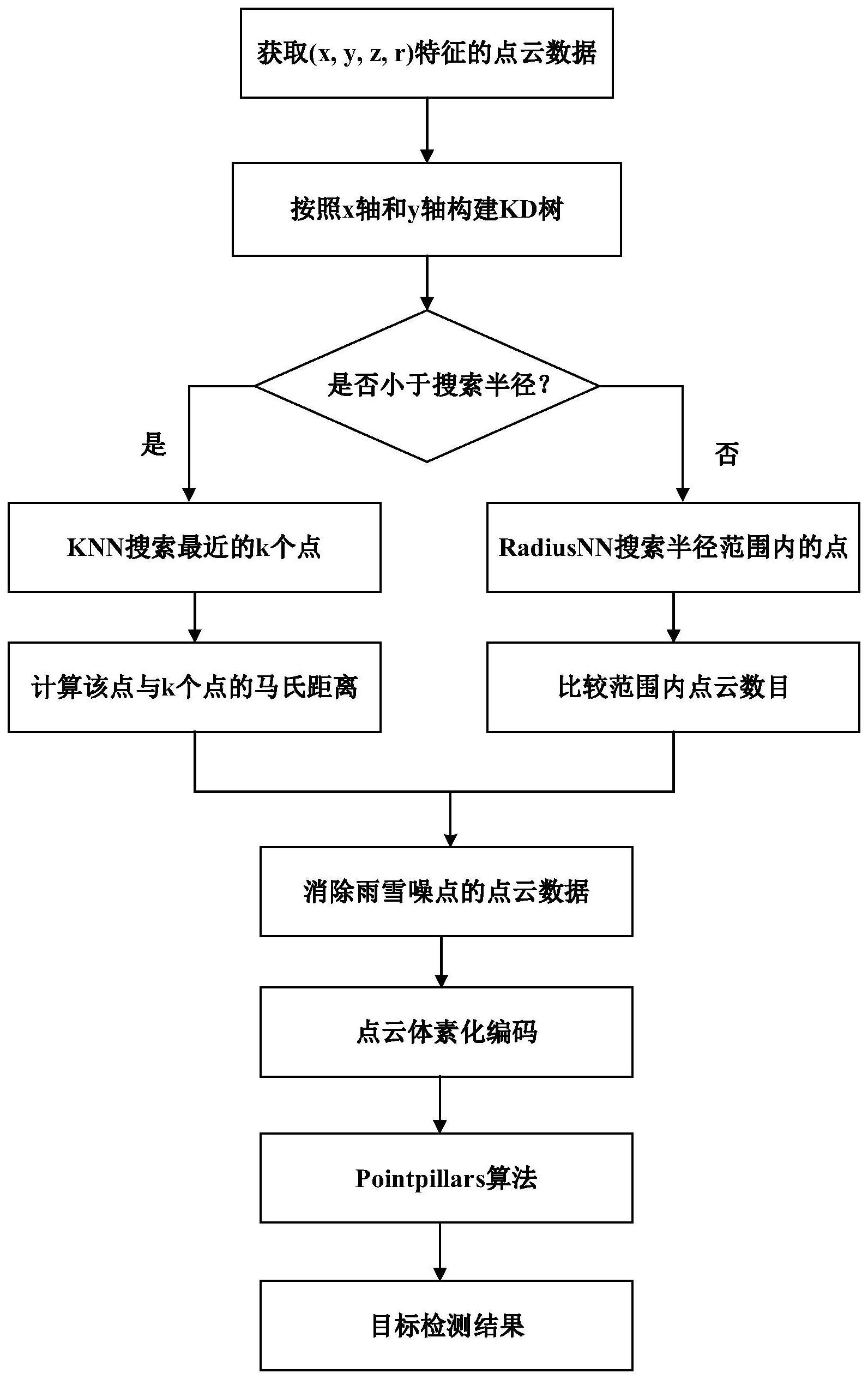
2、为了实现上述目的,本发明的技术方案如下,一种基于马氏距离和pointpillars的雨雪天气激光雷达目标检测方法,包括如下步骤:
3、步骤1,获取一帧(x,y,z,r)特征的点云数据;
4、步骤2,点云投影到xoy平面,按照x轴y轴数据构建kd树;
5、步骤3,遍历一帧点云中的每一个点,判定距离是否小于设定半径;即判定与sr的大小关系;
6、步骤4,knn搜索最近的k个点或radiusnn搜索半径范围内的点;
7、步骤5,计算比较该点与k个点的马氏距离或比较范围内点云数目;
8、步骤6,将去除雨雪噪点后的点云数据进行体素化编码;
9、步骤7,将体素化编码后的点云送入pointpillars算法输出检测结果。
10、进一步地,步骤2中构建kd树,具体为对于一个二维的平面,在kd树每一层的构建中都选择一个维度x轴或者y轴来进行划分,将k维的数据空间分为两部分,并使其尽量平衡。然后如此递归下去其中,构建kd树的方法是通过判定x轴和y轴数据大小的,按照左子树小于根节点小于右子树的法则构建二叉树;
11、进一步地,步骤4中判定与sr的大小关系,具体为对于每个点,若d小于搜索半径sr,则采用knn算法搜索构建的kd树内最近的k个点,即与各个结点的比较结果向下访问kd树,直至达到叶子结点,并判断是否需要进行回溯操作,最后返回最近的k个点云坐标索引;若大于搜索半径则采用radiusnn算法搜索半径范围内的所有点,返回点云数目;
12、进一步地,步骤5中比较该点与k个点的马氏距离,具体为若d小于搜索半径sr,计算k个点的马氏距离并进行比较,其中马氏距离的具体步骤为,假设x,y为二维坐标,则这k个点的均值可以表示为:
13、
14、协方差矩阵为:
15、
16、
17、
18、
19、则马氏距离计算公式为:
20、
21、若大于设定的马氏距离d,则判定为雨雪噪点;若d大于搜索半径sr该点,搜索半径范围内的点云数目小于k,则判定该点为雨雪噪点,否则为正常点进行保留;
22、进一步地,步骤6中,点云数据进行体素化编码,具体为首先将送入的点云数据按照x,y轴将点云划分为一个个网络形成体素,将点云数据增强,形成d=9的张量,分别为(x,y,z,r,xc,yc,zc,xp,yp),其中x,y,z,r为送入的点云数据信息,xc,yc,zc为该点云划分网格的中心坐标,xp,yp为点与几何中心的相对位置。假设每个样本有p个非空的体素,每个pillar网格有n个点云数据,则样本可以用一个(d,p,n)的张量表示,再对pillar所在的维度进行maxpooling操作得到(c,p)维度的特征图,再将p转换为(h,w)形成(c,h,w)的张量。
23、进一步地,步骤7中,送入的pointpillars算法,具体模型总的损失函数定义为:
24、
25、
26、其中l为总的损失函数,lcls为分类的损失函数,lloc为位置的损失函数,ldir为方向分类损失函数;βloc,βcls,βdir分别为位置损失函数的系数,分类损失函数的系数以及方向分类损失函数的系数;参数p为样本为正值的概率;αa为权重系数,α,γ为系统的超参数;(x,y,z,w,l,h,θ)为预测框的位置以及长宽高航向角参数;smoothl1为损失函数;δb为预测值与真值的偏移。
27、与现有的技术相比,本发明具有以下的优点和技术效果:
28、1)采用半径判定的马氏距离的滤波器,考虑了噪声协方差分布的信息,可以在滤波的过程中能够滤除雨雪噪点的同时,保留更多近处的特征点信息;
29、2)采用滤波结合pointpillars检测算法结合的算法,可以具有更快的检测速度达到较好的实时性,同时提高了雨雪天车辆行人的识别准确度。
30、3)采用滤波pointpillars检测算法结合的算法相比传统的算法可以减少更多的计算资源和算力。
31、4)一种基于马氏距离和pointpillars的雨雪天气激光雷达目标检测方法相比于传统的目标检测算法在雨雪等恶劣天气下对于行人和车辆具有更高的识别准确率。
技术特征:
1.一种基于马氏距离和pointpillars的雨雪天气激光雷达目标检测方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的基于马氏距离和pointpillars的雨雪天气激光雷达目标检测方法,其特征在于,步骤2中构建kd树,具体为对于一个二维的平面,在kd树每一层的构建中都选择一个维度x轴或者y轴来进行划分,将k维的数据空间分为两部分,并使其尽量平衡,然后如此递归下去其中,构建kd树的方法是通过判定x轴和y轴数据大小的,按照左子树小于根节点小于右子树的法则构建二叉树。
3.根据权利要求1所述的基于马氏距离和pointpillars的雨雪天气激光雷达目标检测方法,其特征在于,
4.根据权利要求2所述的基于马氏距离和pointpillars的雨雪天气激光雷达目标检测方法,其特征在于,步骤5中比较该点与k个点的马氏距离,具体为若d小于搜索半径sr,计算k个点的马氏距离并进行比较,其中马氏距离的具体步骤为,假设这k个点的均值可以表示为:
5.根据权利要求3所述的基于马氏距离和pointpillars的雨雪天气激光雷达目标检测方法,其特征在于,步骤6中,点云数据进行体素化编码,具体为首先将送入的点云数据按照x,y轴将点云划分为一个个网络形成体素,将点云数据增强,形成d=9的张量,分别为(x,y,z,r,xc,yc,zc,xp,yp),其中x,y,z,r为送入的点云数据信息,xc,yc,zc为该点云划分网格的中心坐标,xp,yp为点与几何中心的相对位置,假设每个样本有p个非空的体素,每个pillar网格有n个点云数据,则样本可以用一个(d,p,n)的张量表示,再对pillar所在的维度进行maxpooling操作得到(c,p)维度的特征图,再将p转换为(h,w)形成(c,h,w)的张量。
6.根据权利要求3所述的基于马氏距离和pointpillars的雨雪天气激光雷达目标检测方法,其特征在于,步骤7中,送入的pointpillars算法,具体模型总的损失函数定义为:
技术总结
本发明涉及一种基于马氏距离和Pointpillars的雨雪天气激光雷达目标检测方法,应用于雨雪天气等恶劣环境下的目标检测领域。该方法通过马氏距离和Pointpillars结合的方法,首先对雨雪噪点进行滤除,然后利用Pointpillars算法输出目标检测结果。即获取激光雷达点点云数据,将点云投影到二维平面,构建KD树;依次将每一个点的距离与设定的最小半径进行比较;通过马氏距离的KNN或RadiusNN算法搜索半径范围内的点判定,进行离群点滤波。最后将处理后的点云进行体素化编码,作为Pointpillar检测算法的输入,经过处理后输出目标检测结果。该算法对比传统的激光雷达目标检测算法可以提高雨雪天气下行人车辆的目标检测精度,同时具有较快的计算速度。
技术研发人员:陈熙源,戈明明
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!