基于双模涡旋光束的横向速度测量方法及系统
本发明涉及一种激光横向测速技术,属于激光测速领域。
背景技术:
1、横向速度测量可以用来测量目标横向移动速度、加速度、位移及振动,在工业控制、军工、航空航天等领域应用潜力广泛。传统的激光测速方法,都只能对目标的径向速度分量进行较为精确的测量,无法获得横向速度信息。目前对于目标横向速度的测量只能依靠多设备多点多角度测量合成,差分测速或图像处理估算等后处理算法,无法对目标横向速度的方向和大小进行准确测量。
技术实现思路
1、针对现有技术无法对目标横向速度的方向和大小进行准确测量的问题,本发明提供一种基于双模涡旋光束的横向速度测量系统。
2、本发明所述基于双模涡旋光束的横向速度测量方法,该方法包括以下步骤:
3、s1、将激光进行空间相位调制生成调制信号,所述调制信号为1阶与4阶的双阶叠加态涡旋光束,调制信号的调制光场呈包括三个横向多普勒效应光斑的三瓣状结构;
4、s2、从s1获取的调制信号中筛选出1级衍射调制信号并由发射系统发射出去,照射至运动目标生成回波信号,所述回波信号包含三个横向多普勒效应光斑区域;
5、s3、接收系统将回波信号加载至阵列探测器;阵列探测器探测回波信号,获取回波光场的三个横向多普勒效应光斑区域;
6、s4、通过示波器得到三个光斑区域每个时刻的光强时序信号,对其进行傅里叶变换,并解算出运动目标的横向速度大小和方向。
7、优选地,回波光场沿周向均分为三个区域,分别为三个横向多普勒效应光斑区域。
8、优选地,解算出运动目标的横向速度大小和方向的过程为:
9、s41、回波光场的三个横向多普勒效应光斑区域,每个区域中具有一个光斑,分别为1号光斑、2号光斑和3号光斑,回波光场中心点指向第i号光斑中心点连线作为第i号辅助方向矢量,运动目标横向速度的三个速度分量vi,i=1,2,3方向为第i号辅助方向矢量反向延长线方向;
10、s42、通过示波器得到回波光场的三个横向多普勒效应光斑区域每个时刻的光强时序信号;
11、s43、对步骤s42获取的光强时序信号进行傅里叶变换,提取第i号光斑区域的多普勒频移量δfi;
12、s44、按公式获取运动目标横向速度的三个速度分量vi的大小,
13、式中,α=λmi2πri,λ为激光信号的波长,mi为第i号光斑区域的轨道角动量阶数,ri为第i号光斑的半径;
14、f0为激光信号的频率,
15、c为光速;
16、s45、结合s41确定的方向和s44确定的大小获取运动目标横向速度的三个速度分量vi,将解算出的v1、v2和v3进行矢量合成获取运动目标的横向速度的大小和方向。
17、优选地,步骤s41中运动目标横向速度的三个速度分量方向的确定过程为:
18、回波光场的三个横向多普勒效应光斑区域,每个区域中具有一个光斑,分别为1号光斑、2号光斑和3号光斑,三个光斑的中心点分别为a1、a2和a3,回波光场中心点为o,则三个辅助矢量为和辅助矢量为的反向延长线方向为运动目标横向速度的速度分量v1的方向,辅助矢量为的反向延长线方向为运动目标横向速度的速度分量v2的方向,辅助矢量为的反向延长线方向为运动目标横向速度的速度分量v3的方向。
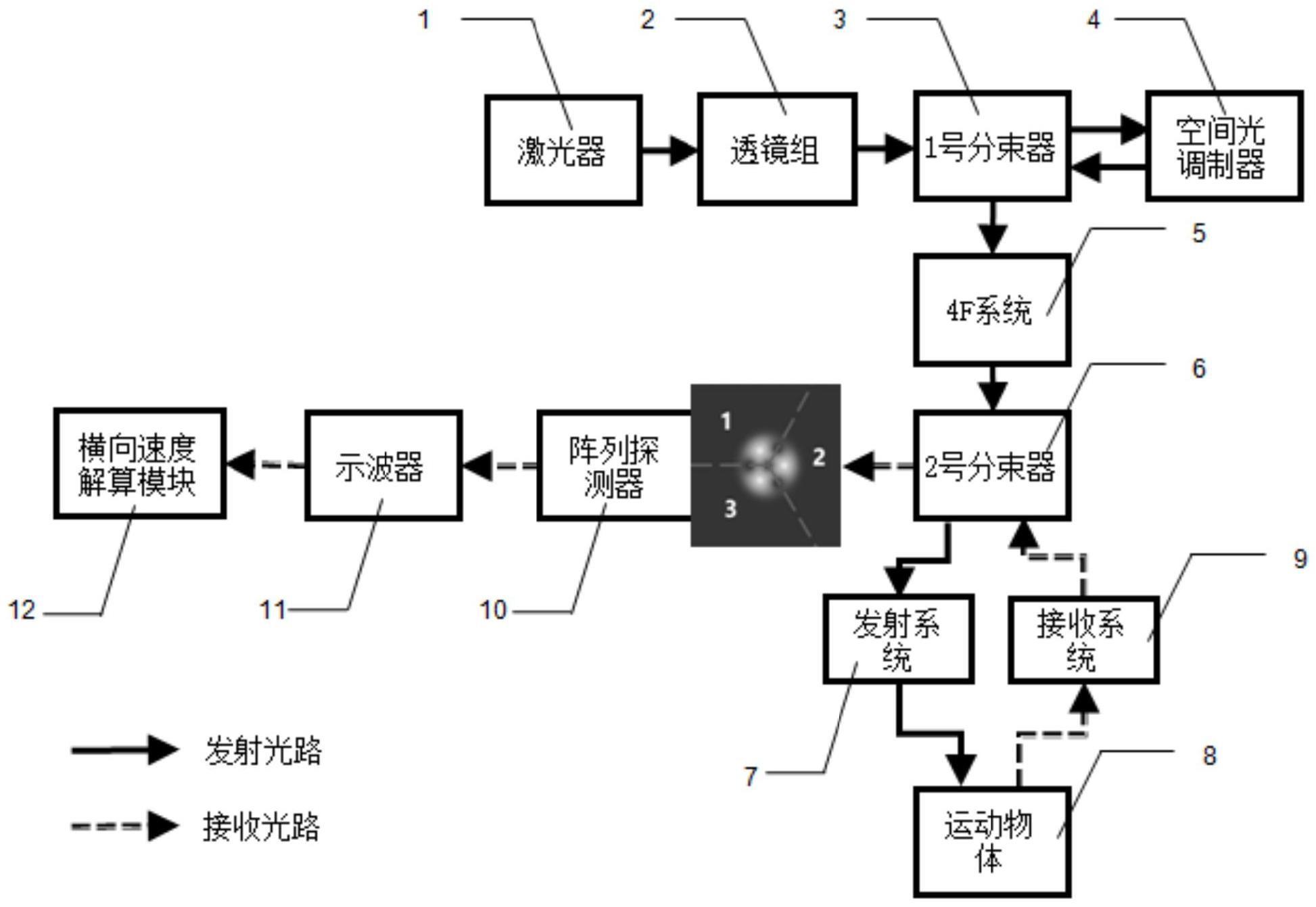
19、本发明还提供另一种技术方案,基于双模涡旋光束的横向速度测量系统,系统包括激光器1、透镜组2、1号分束器3、空间光调制器4、4f系统5、2号分束器6、发射系统7、运动目标8、接收系统9、阵列探测器10、示波器11和横向速度解算模块12;
20、所述激光器1发射的激光至透镜组2,透镜组2对光束进行扩展和准直,然后通过1号分束器3入射到空间光调制器4进行空间相位调制,调制信号被1号分束器3反射并入射至4f系统5,再通过2号分束器6和发射系统7照射运动目标8生成回波信号;
21、所述调制信号是1阶与4阶的双阶叠加态涡旋光束;调制光场呈包括三个横向多普勒效应光斑的三瓣状结构;
22、所述4f系统5从入射的调制信号中筛选出1级衍射调制信号入射至所述2号分束器6,再由发射系统7发射;
23、接收系统9将回波信号加载至阵列探测器10;阵列探测器10探测回波信号的三个横向多普勒效应光斑区域,并通过与阵列探测器10连接的示波器11得到光强的时序信号,对其进行傅里叶变换,由横向速度解算模块12解算出运动目标的横向速度大小和方向。
24、优选地,空间相位调制指进行双阶轨道角动量复合调制生成调制信号。
25、优选地,激光器1发射的激光为高斯模式激光信号。
26、优选地,调制信号是1阶与4阶的双阶叠加态涡旋光束,其调制过程为:所述空间光调制器4对高斯模式激光信号的调制过程需要将1阶和4阶涡旋光的相位图叠加成复合的相位图,加载到空间光调制器4上,并由激光入射生成。
27、本发明的有益效果:本发明无需依靠图像处理估算等计算算法和多点测速合成等方法,利用涡旋光束独特的相位特性,由于涡旋光束的光子的运动方向与光轴存在一个偏移角度,光束经过目标反射后会产生横向多普勒频移量,可以用来进行横向测速。本发明通过对光束进行多阶轨道角动量复合调制,能够简单有效的解决单光束实时性的横向运动速度方向和大小的测量,通过对回波的结构光场进行多个特征点探测解算,充分的利用横向多普勒效应,实现高精度实时的激光横向速度测量。
技术特征:
1.基于双模涡旋光束的横向速度测量方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述基于双模涡旋光束的横向速度测量方法,其特征在于,回波光场沿周向均分为三个区域,分别为三个横向多普勒效应光斑区域。
3.根据权利要求1或2所述基于双模涡旋光束的横向速度测量方法,其特征在于,解算出运动目标的横向速度大小和方向的过程为:
4.根据权利要求3所述基于双模涡旋光束的横向速度测量方法,其特征在于,步骤s41中运动目标横向速度的三个速度分量方向的确定过程为:
5.基于双模涡旋光束的横向速度测量系统,该系统用于实现权利要求1至4任一权利要求所述方法,其特征在于,系统包括激光器(1)、透镜组(2)、1号分束器(3)、空间光调制器(4)、4f系统(5)、2号分束器(6)、发射系统(7)、运动目标(8)、接收系统(9)、阵列探测器(10)、示波器(11)和横向速度解算模块(12);
6.根据权利要求5所述基于双模涡旋光束的横向速度测量系统,其特征在于,空间相位调制指进行双阶轨道角动量复合调制生成调制信号。
7.根据权利要求5所述基于双模涡旋光束的横向速度测量系统,其特征在于,激光器(1)发射的激光为高斯模式激光信号。
8.根据权利要求7所述基于双模涡旋光束的横向速度测量系统,其特征在于,调制信号是1阶与4阶的双阶叠加态涡旋光束,其调制过程为:所述空间光调制器(4)对高斯模式激光信号的调制过程需要将1阶和4阶涡旋光的相位图叠加成复合的相位图,加载到空间光调制器(4)上,并由激光入射生成。
技术总结
基于双模涡旋光束的横向速度测量方法及系统,属于激光测速领域,本发明为解决现有技术无法对目标横向速度的方向和大小进行准确测量的问题。本发明方法包括:S1、将激光进行空间相位调制生成1阶与4阶的双阶叠加态涡旋光束作为调制信号,其调制光场呈包括三个横向多普勒效应光斑的三瓣状结构;S2、筛选出1级衍射调制信号并由发射系统发射出去,照射至运动目标生成回波信号,回波信号包含三个横向多普勒效应光斑区域;S3、接收系统将回波信号加载至阵列探测器,获取回波光场的三个横向多普勒效应光斑区域;S4、通过示波器得到三个光斑区域每个时刻的光强时序信号,对其进行傅里叶变换,并解算出运动目标的横向速度大小和方向。
技术研发人员:张子静,王泓洋,赵远,张延相
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!