本发明涉及自动驾驶,特别涉及一种基于经纬度信息的主车信息坐标系转换方法及系统。
背景技术:
1、随着汽车保有量的不断提升和自动驾驶技术的不断进步,智能驾驶系统逐渐进入公众视野,其中车端传感器采集的环境信息成为自动驾驶车辆的视觉识别信息的重要来源。目前对于车端环境信息的处理方法还存在一定的缺陷。
2、在典型自动驾驶车辆中,车辆视觉传感器往往是与车体固连的,所以车端设备采集到的环境信息往往是在主车视角下,坐标系跟随车辆的运动而不断移动,其主要缺点:一方面难以直接研究交通参与对象的绝对轨迹,另一方面也对驾驶场景的全局理解具有局限性。
技术实现思路
1、本发明的目的是提供一种基于经纬度信息的主车信息坐标系转换方法及系统,将环境信息从主车视角坐标系下的相对信息转换到鸟瞰视角坐标系下的绝对坐标。
2、为实现上述目的,本发明提供了如下方案:
3、一种基于经纬度信息的主车信息坐标系转换方法,包括:
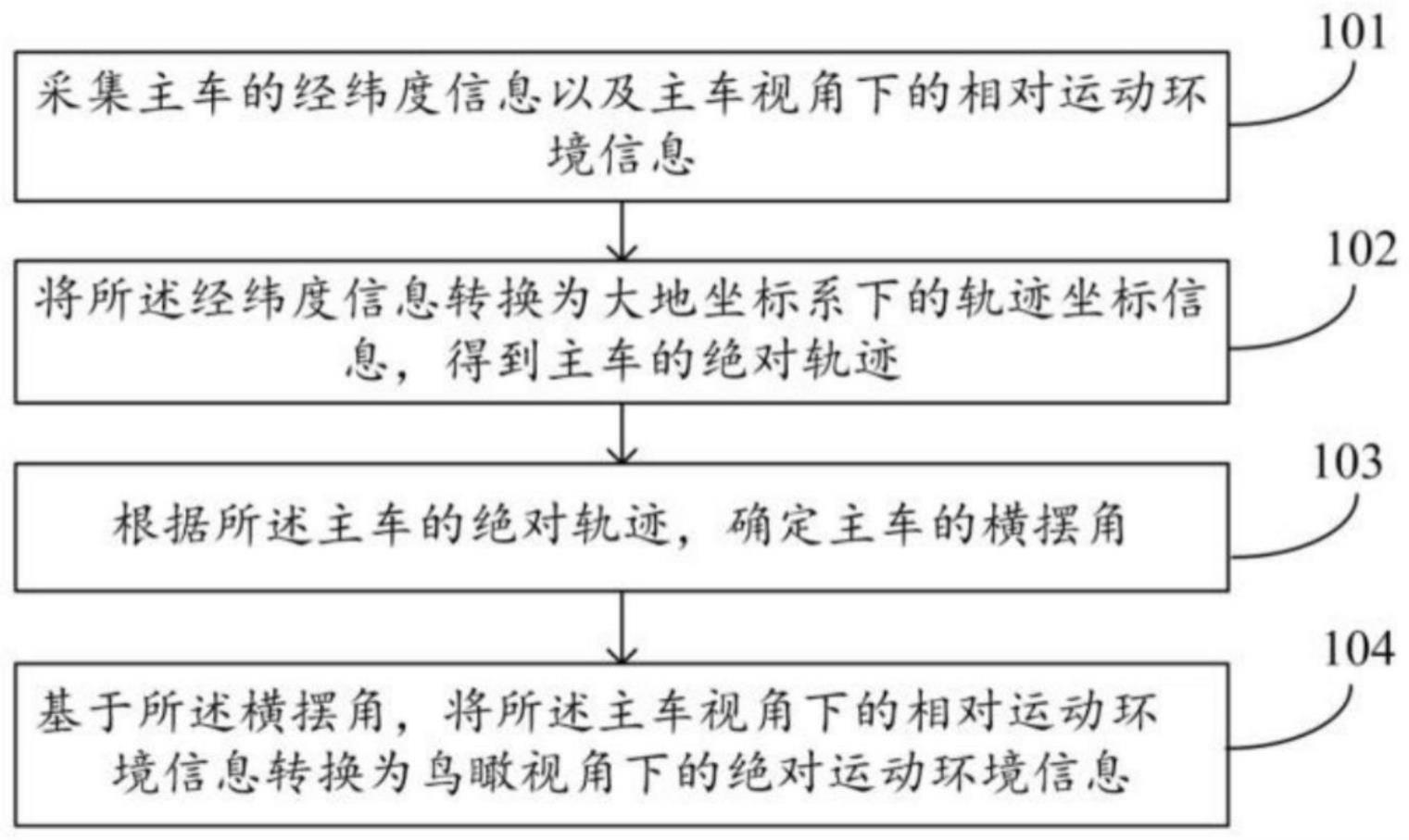
4、采集主车的经纬度信息以及主车视角下的相对运动环境信息;所述主车视角下的相对运动环境信息包括:周边交通参与者在主车视角坐标系下的位置相对坐标和速度相对坐标;
5、将所述经纬度信息转换为大地坐标系下的轨迹坐标信息,得到主车的绝对轨迹;所述大地坐标系以正东方向为x轴正方向,以正北方向为y轴正方向,以主车运动轨迹的起始点为原点;
6、根据所述主车的绝对轨迹,确定主车的横摆角;
7、基于所述横摆角,将所述主车视角下的相对运动环境信息转换为鸟瞰视角下的绝对运动环境信息;所述鸟瞰视角下的绝对运动环境信息包括:周围交通参与者在鸟瞰视角坐标系中的位置绝对坐标和速度绝对坐标。
8、可选地,在将所述经纬度信息转换为大地坐标系下的轨迹坐标信息,得到主车的绝对轨迹之后,还包括:
9、利用加权线性回归的方法对所述绝对轨迹进行平滑处理。
10、可选地,根据所述主车的绝对轨迹,确定主车的横摆角,具体包括:
11、根据所述主车的绝对轨迹,确定主车不同方向上的绝对速度;
12、基于不同方向上的绝对速度确定主车的横摆角。
13、可选地,所述主车不同方向上的绝对速度的计算公式如下:
14、;
15、其中,为时刻x方向的主车绝对速度,为时刻y方向的主车绝对速度,为第k个数据采集的时间点,,为数据采集长度,为固定的时间间隔,为时刻对应的主车绝对轨迹坐标。
16、可选地,基于所述横摆角,通过公式,将所述主车视角下的相对运动环境信息转换为鸟瞰视角下的绝对运动环境信息;
17、其中,为横摆角;(,)为周围交通参与者在鸟瞰视角坐标系中的位置绝对坐标;(,)为周围交通参与者在鸟瞰视角坐标系中x轴方向和y轴方向上的速度绝对坐标;(,)为周围交通参与者在主车视角坐标系中的位置相对坐标;(,)为周围交通参与者在主车视角坐标系中的x轴方向和y轴方向上的速度相对坐标;(,)为主车在大地坐标系中的位置绝对坐标;(,)为主车在大地坐标系中x轴方向和y轴方向上的速度绝对坐标。
18、可选地,在基于所述横摆角,将所述主车视角下的相对运动环境信息转换为鸟瞰视角下的绝对运动环境信息之后,还包括:
19、利用加权线性回归方法对鸟瞰视角下的绝对运动环境信息进行平滑处理。
20、本发明还提供了一种基于经纬度信息的主车信息坐标系转换系统,包括:
21、采集模块,用于采集主车的经纬度信息以及主车视角下的相对运动环境信息;所述主车视角下的相对运动环境信息包括:周边交通参与者在主车视角坐标系下的位置相对坐标和速度相对坐标;
22、第一转换模块,用于将所述经纬度信息转换为大地坐标系下的轨迹坐标信息,得到主车的绝对轨迹;所述大地坐标系以正东方向为x轴正方向,以正北方向为y轴正方向,以主车运动轨迹的起始点为原点;
23、横摆角确定模块,用于根据所述主车的绝对轨迹,确定主车的横摆角;
24、第二转换模块,用于基于所述横摆角,将所述主车视角下的相对运动环境信息转换为鸟瞰视角下的绝对运动环境信息;所述鸟瞰视角下的绝对运动环境信息包括:周围交通参与者在鸟瞰视角坐标系中的位置绝对坐标和速度绝对坐标。
25、可选地,所述横摆角确定模块,具体包括:
26、绝对速度确定单元,用于根据所述主车的绝对轨迹,确定主车不同方向上的绝对速度;
27、横摆角确定单元,用于基于不同方向上的绝对速度确定主车的横摆角。
28、可选地,还包括:
29、平滑处理模块,用于利用加权线性回归的方法对所述绝对轨迹以及鸟瞰视角下的绝对运动环境信息进行平滑处理。
30、根据本发明提供的具体实施例,本发明公开了以下技术效果:
31、本发明通过gps采集主车的经纬度信息,并根据经纬度信息得到主车轨迹信息,从而得到相关的坐标系转换参数,即主车横摆角,然后基于坐标系转换参数将主车视角下的相对运动环境信息转换到鸟瞰视角下的绝对运动环境信息,从而能够帮助自动驾驶车辆对视觉采集信息的研究,也方便其与路端设备进行信息融合,加强自动驾驶车辆对于驾驶场景的全局理解。
技术特征:1.一种基于经纬度信息的主车信息坐标系转换方法,其特征在于,包括:
2.根据权利要求1所述的基于经纬度信息的主车信息坐标系转换方法,其特征在于,在将所述经纬度信息转换为大地坐标系下的轨迹坐标信息,得到主车的绝对轨迹之后,还包括:
3.根据权利要求1所述的基于经纬度信息的主车信息坐标系转换方法,其特征在于,根据所述主车的绝对轨迹,确定主车的横摆角,具体包括:
4.根据权利要求3所述的基于经纬度信息的主车信息坐标系转换方法,其特征在于,所述主车不同方向上的绝对速度的计算公式如下:
5.根据权利要求1所述的基于经纬度信息的主车信息坐标系转换方法,其特征在于,基于所述横摆角,通过公式,将所述主车视角下的相对运动环境信息转换为鸟瞰视角下的绝对运动环境信息;
6.根据权利要求1所述的基于经纬度信息的主车信息坐标系转换方法,其特征在于,在基于所述横摆角,将所述主车视角下的相对运动环境信息转换为鸟瞰视角下的绝对运动环境信息之后,还包括:
7.一种基于经纬度信息的主车信息坐标系转换系统,其特征在于,包括:
8.根据权利要求7所述的基于经纬度信息的主车信息坐标系转换系统,其特征在于,所述横摆角确定模块,具体包括:
9.根据权利要求7所述的基于经纬度信息的主车信息坐标系转换系统,其特征在于,还包括:
技术总结本发明公开了一种基于经纬度信息的主车信息坐标系转换方法及系统,属于自动驾驶技术领域。该方法包括:采集主车的经纬度信息以及主车视角下的相对运动环境信息;将所述经纬度信息转换为大地坐标系下的轨迹坐标信息,得到主车的绝对轨迹;根据所述主车的绝对轨迹,确定主车的横摆角;基于所述横摆角,将所述主车视角下的相对运动环境信息转换为鸟瞰视角下的绝对运动环境信息。本发明将主车视角下的相对运动环境信息转换到鸟瞰视角下的绝对运动环境信息,从而能够帮助自动驾驶车辆对视觉采集信息的研究,也方便其与路端设备进行信息融合,加强自动驾驶车辆对于驾驶场景的全局理解。
技术研发人员:吕超,刘昱沛,崔格格,孟相浩,臧政,龚建伟,齐建永
受保护的技术使用者:北京理工大学
技术研发日:技术公布日:2024/1/12