一种装船机溜筒铲斗俯仰角度检测装置的制作方法
本发明涉及散货码头装船机设备的智能化改造领域,特别是涉及一种装船机溜筒铲斗俯仰角度检测装置。
背景技术:
1、为装船机加装与主机系统相互独立的智能化系统时,需检测溜筒铲斗的俯仰角度。原本的溜筒铲斗俯仰角度并无可靠的检测装置,有依靠液压油缸的给油量参数间接检测,或者将倾角传感器放置在溜筒铲斗上直接检测,或利用固定摄像头配合量角器人为观测。
2、传统的检测装置存在诸多缺点,第一:液压油缸的密封性在长期作业过程中会有衰,在长期作业以后会发生液压油泄露的状况,如此,检测液压油缸的给油量并不能有效而准确的检测溜筒铲斗的俯仰角度。第二:倾角传感器比较脆弱,在装船机长时间作业时产生的振动会将倾角传感器损坏,耐久性低。第三,固定摄像头的测量方式只适合静态检测,因为装船机进行装船作业时溜筒和铲斗需要按程序运动,也就是需要对溜筒铲斗进行实时的动态检测。另外由于长时间的装船作业,会使溜桶铲斗产生极大的磨损,也就是说,铲斗需要定期更换,那么在铲斗上安装传感器的方案均不可行,对溜桶铲斗俯仰角度的实时动态检测,长期以来是困扰装船作业的难题,长期以来都是依靠装船机司机的肉眼观察进行的俯仰作业。
技术实现思路
1、本发明的目的是提供一种装船机溜筒铲斗俯仰角度检测装置,以解决无法实时动态检测装船机溜筒铲斗的俯仰角度的问题。
2、为实现上述目的,本发明提供了如下方案:
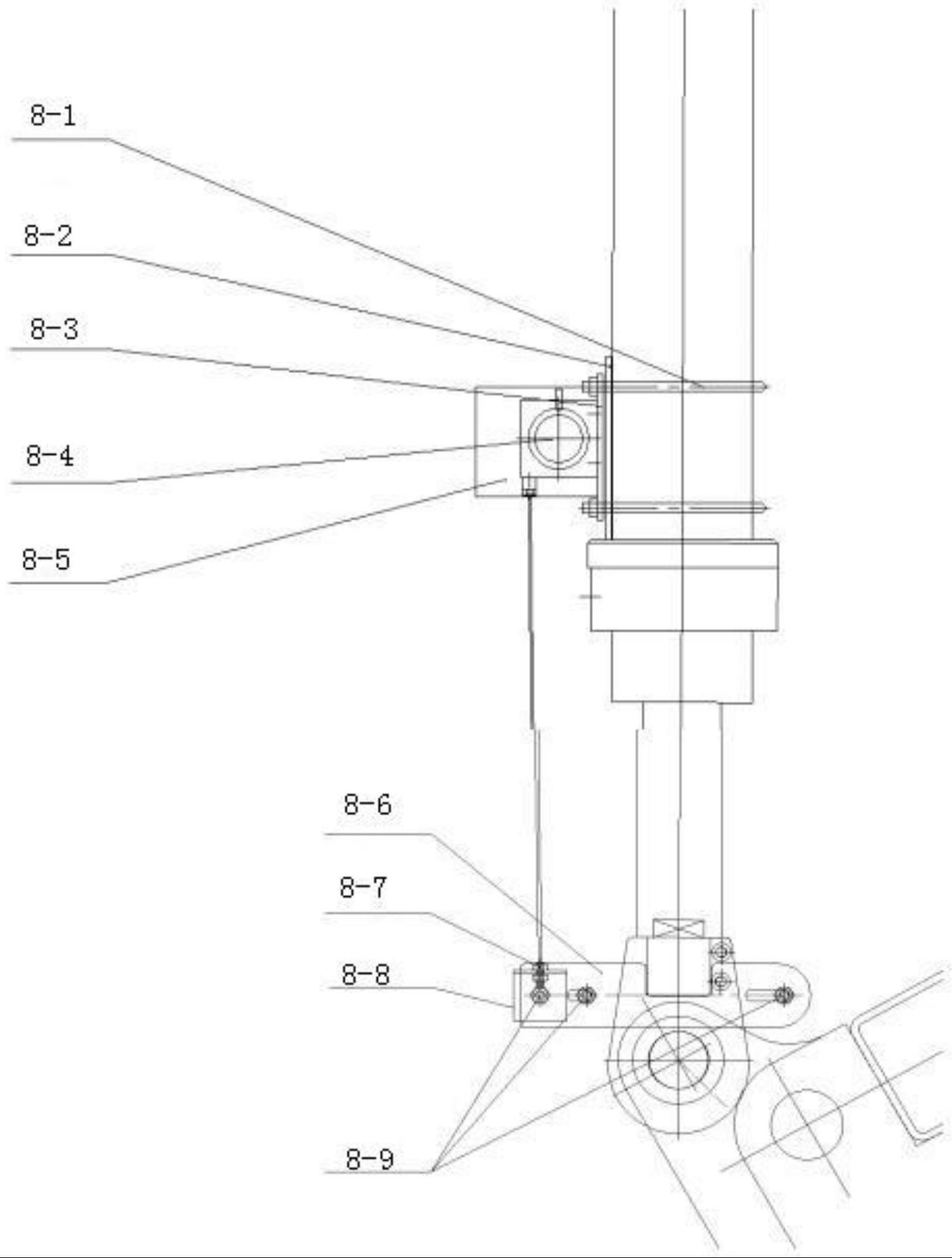
3、一种装船机溜筒铲斗俯仰角度检测装置,包括:拉绳位移传感器、传感器安装板以及计算机;
4、所述拉绳位移传感器设于所述传感器安装板上,所述传感器安装板设于装船机溜筒铲斗俯仰油缸的缸筒表面;所述拉绳位移传感器的绳端通过预制件装夹在所述装船机溜筒铲斗俯仰油缸的缸臂端部;所述拉绳位移传感器与所述计算机相连接;
5、所述拉绳位移传感器的拉绳随着所述缸臂做伸缩运动,检测所述缸臂的拉绳位移信号;
6、所述拉绳位移传感器将所述拉绳位移信号上传至所述计算机,所述计算机用于根据所述拉绳位移信号计算装船机溜筒铲斗的俯仰角度。
7、可选的,还包括:u型紧固螺栓以及减震垫;
8、所述传感器安装板上设有安装孔;所述安装孔与所述u型紧固螺栓相匹配;所述u型紧固螺栓的两端贯穿所述传感器安装板,将所述传感器安装板固定在所述缸筒表面;
9、所述减震垫设于所述传感器安装板与所述缸筒表面之间。可选的,所述减震垫为橡胶减震垫。
10、可选的,所述预制件,具体包括:两个缸臂端部夹片、绳端固定座以及紧固螺栓;
11、所述缸臂端部夹片上设有第一圆孔以及卡槽,所述第一圆孔与所述紧固螺栓相匹配,所述卡槽用于固定所述缸臂;
12、所述绳端固定座为开口向下的固定结构,所述绳端固定座设于两个所述缸臂端部夹片之间;所述绳端固定座的两侧设于第二圆孔,所述第二圆孔与所述第一圆孔位于同一水平位置,且所述紧固螺栓穿过所述第二圆孔固定所述绳端固定座;所述绳端固定座的顶端设有第三圆孔,所述第三圆孔与另一紧固螺栓相匹配,另一紧固螺栓用于固定所述拉绳位移传感器的绳端。
13、可选的,还包括:拉绳位移传感器护罩;
14、所述拉绳位移传感器护罩,设于所述拉绳位移传感器上。
15、可选的,∠α=k×s;其中,∠α为俯仰角度;k为常数,根据不同装船机的尺寸确定;s为缸臂的伸缩量。
16、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供了一种装船机溜筒铲斗俯仰角度检测装置,将拉绳位移传感器通过传感器安装板安装在装船机溜筒铲斗俯仰油缸的缸筒表面,避免了在溜筒铲斗上直接安装传感器,同时相较于倾角传感器更加稳定可靠,且将拉绳位移传感器作为检测元件,有效隔绝直接安装在铲斗上的工况,降低机械振动对传感器的影响,从而实现实时动态检测装船机溜筒铲斗的俯仰角度。
技术特征:
1.一种装船机溜筒铲斗俯仰角度检测装置,其特征在于,包括:拉绳位移传感器、传感器安装板以及计算机;
2.根据权利要求1所述的装船机溜筒铲斗俯仰角度检测装置,其特征在于,还包括:u型紧固螺栓以及减震垫;
3.根据权利要求2所述的装船机溜筒铲斗俯仰角度检测装置,其特征在于,所述减震垫为橡胶减震垫。
4.根据权利要求1所述的装船机溜筒铲斗俯仰角度检测装置,其特征在于,所述预制件,具体包括:两个缸臂端部夹片、绳端固定座以及紧固螺栓;
5.根据权利要求1所述的装船机溜筒铲斗俯仰角度检测装置,其特征在于,还包括:拉绳位移传感器护罩;
6.根据权利要求1所述的装船机溜筒铲斗俯仰角度检测装置,其特征在于,∠α=k×s;其中,∠α为俯仰角度;k为常数,根据不同装船机的尺寸确定;s为缸臂的伸缩量。
技术总结
本发明提供了一种装船机溜筒铲斗俯仰角度检测装置。该检测装置包括:拉绳位移传感器、传感器安装板以及计算机;所述拉绳位移传感器设于所述传感器安装板上,所述传感器安装板设于装船机溜筒铲斗俯仰油缸的缸筒表面;所述拉绳位移传感器的绳端通过预制件装夹在所述装船机溜筒铲斗俯仰油缸的缸臂端部;所述拉绳位移传感器与所述计算机相连接;所述拉绳位移传感器的拉绳随着所述缸臂做伸缩运动,检测所述缸臂的拉绳位移信号;所述拉绳位移传感器将所述拉绳位移信号上传至所述计算机,所述计算机用于根据所述拉绳位移信号计算装船机溜筒铲斗的俯仰角度。本发明能够实时动态检测装船机溜筒铲斗的俯仰角度。
技术研发人员:李欣,刘金朋,王书彬,王云健,王红涛,于冯全,刘伟,郑欣,姜帅,李慧鹏,王强,黄强,沈阅,高明,史达,曹禹,韩怿,陈鹏,高鹏,温德龙,王轶之,马金,于航
受保护的技术使用者:国投曹妃甸港口有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!