三维采集装置的制作方法
本公开的示例实施例总体上涉及一种三维采集装置。
背景技术:
1、三维采集装置是利用三维扫描技术的一种科学仪器,用来侦测并分析现实世界中物体或环境的形状与外观数据。通常,三维扫描仪利用激光相机实现精准、非接触式的数据采集,并将实物立体信息转换为计算机能够识别并直接处理的数字信号。由三维扫描仪采集到的数据可以用于三维重建计算,以创建与真实世界中的实际物体或虚拟物体的数字模型。
2、三维采集装置目前也越来越多地应用于房屋构造的测量和扫描上。例如,在扫描室内环境时,三维采集装置通常被放置在被扫描房屋的内部的固定位置,其光学探测部分(包括相机和激光雷达等)通常被驱动部件驱动旋转一周来完成房间构造的扫描。
技术实现思路
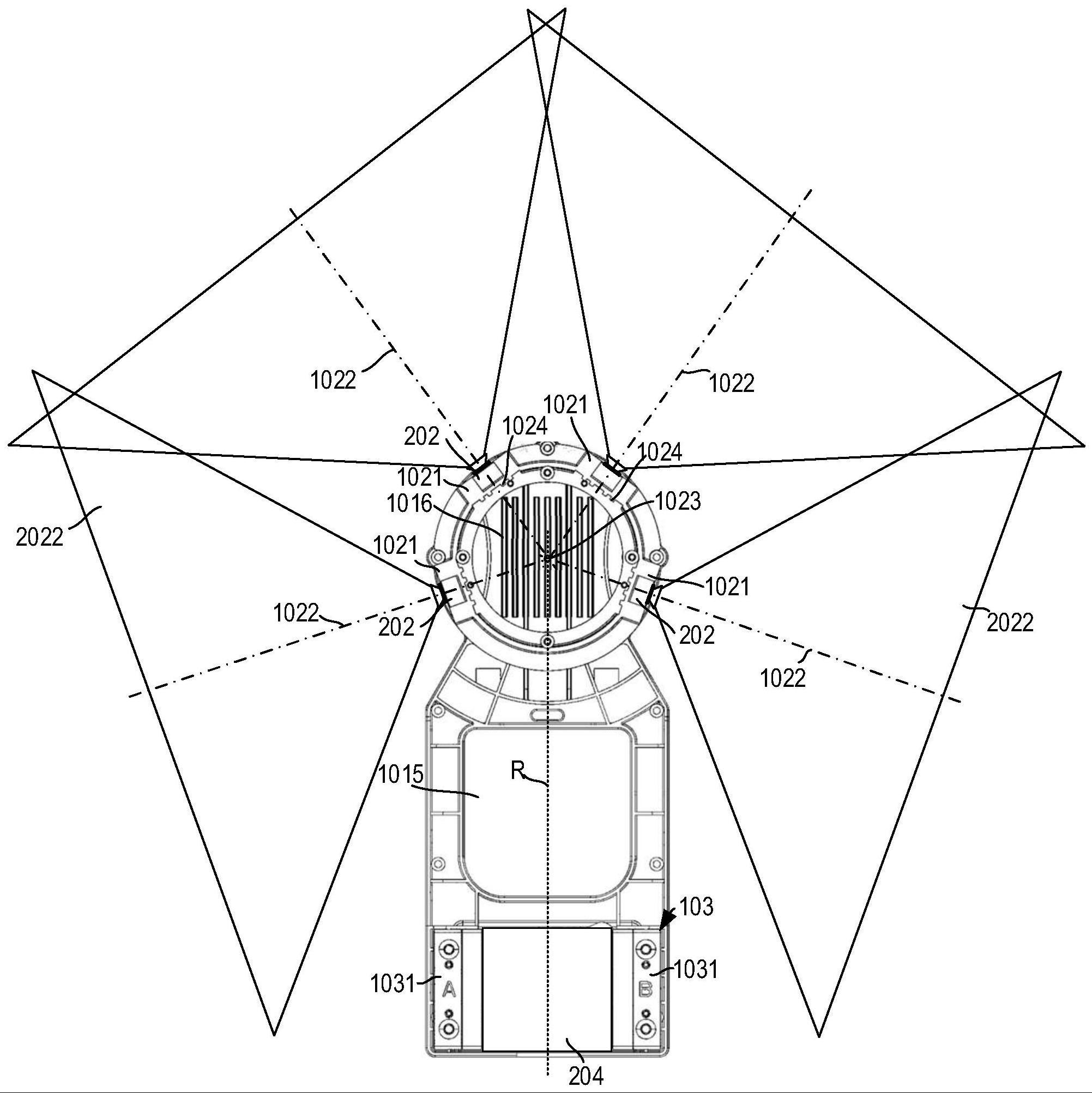
1、在本公开的第一方面,提供了一种三维采集装置。该三维采集装置包括:装配组件,包括:相机安装支架,并且包括主安装支架,耦合在相机安装支架的轴向端部,并且包括雷达安装部;激光雷达,被布置在雷达安装部上,并且适于获取以雷达法线为中心的雷达视场内的对象的点云数据;以及多个相机,被布置在相机安装支架的多个定位部中,并且适于各自沿相机安装支架的径向方向向外获取以沿径向方向延伸的相机法线为中心的相机视场内的对象的图像数据,其中多个相机被布置为多条相机法线相交于法线交点,并且法线交点在雷达法线上。
2、通过根据本公开实施例的三维扫描装置,可以有效的减少多个相机之间及相机和激光雷达之间的视差,从而提升数据处理的效果,减少全景图的拼缝,以及得到更好的模型。此外,装配组件能够以简单有效的方式确保多个相机以及激光雷达之间的定位和装配精度,从而能够可靠地保证上述效果。
3、在一些实施例中,多个相机的多条相机法线都位于法线面中,并且雷达法线与法线面成非零角度。以此方式,能够使相机和激光雷达的视场不会相互干涉,并由此有利于相机和激光雷达的紧凑布置,从而促进三维采集装置的小型化。
4、在一些实施例中,多个相机的相机视场与激光雷达的雷达视场部分重叠。以此方式,能够利于激光雷达以及相机的参数标定,并进而有利于后续的数据融合处理来由此提高所输出的数据的精度和可靠性。另一方面,这种布置方式还能够使得相机和激光雷达同时对空间进行扫描,来同时获取空间中至少某一区域的点云数据和图像数据。处理单元可以对该点云数据和图像数据进行同时处理以将点云数据和图像数据融合来生成具有深度信息的虚拟现实图像。以此方式,能够进一步提高数据采集效率以及数据融合质量。
5、在一些实施例中,多个相机被周向地布置在相机安装支架的在周向上大于180°的范围内。以此方式,多个相机的相机视场能够覆盖周向上更大的范围,从而使得在静止状态下相机能够覆盖纵向周向上的大部分区域,并最终使得三维采集装置只需要旋转半周就能够获取空间的全景图像,从而提高了采集效率和精度。
6、在一些实施例中,三维采集装置还包括:驱动部件,被布置在装配组件上,并且适于驱动多个相机和激光雷达沿转动轴线转动,并且转动轴线垂直于雷达法线并穿过法线交点。以此方式,能够有效地减轻或者消除相机和激光雷达在绕转动轴线旋转的过程中可能出现的视差,由此来减轻后续的数据处理工作量,并提升模型的创建效果。
7、在一些实施例中,三维采集装置还包括:壳体,适于容纳装配组件、多个相机和激光雷达,并且包括本体,本体包括环形凹入部和被布置在环形凹入部的轴向上的一侧的半球形突出部,环形凹入部包括多个相机窗口,其中多个相机被布置在多个相机窗口对应的位置以通过多个相机窗口获取相机视场内的图像数据,并且激光雷达被布置在半球形突出部中。通过将各个部件容纳在壳体中,能够有效地保护三维采集装置的各个部件。此外,将相机布置在环形凹入部中,能够进一步有效地保护相机,从而避免相机因磕碰等造成的损坏,由此来提高三维采集装置的可靠性。
8、在一些实施例中,本体还包括:第一突出部分和第二突出部分,其中环形凹入部位于第一突出部分和第二突出部分之间,并且相对于第一突出部分和第二突出部分在径向上凹入预定距离,以及其中半球形突出部突出部位于第一突出部分在轴向上远离环形凹入部的一侧。一方面,第一突出部分和第二突出部分能够保护相机免受磕碰等原因损坏。另一方面,第一突出部分和第二突出部分还能够容纳一些电子器件,从而使得三维采集装置的布局更加合理,并利于三维采集装置的小型化。
9、在一些实施例中,本体还包括:第一顶部通气区,被布置在第二突出部分在环形凹入部的轴向上的端部,并且包括多个通气孔。通过将第一顶部通气区布置在上述位置,能够保证诸如风扇等的气流驱动装置装配在第一顶部通气区处,从而保证壳体内部散热气流的循环,并由此有利于壳体中各部件的散热。
10、在一些实施例中,本体还包括第二顶部通气区,被形成在第一突出部分上,位于半球形突出部的周围,并且包括多个通气孔。通过在半球形突出部的周围设置第二顶部通气区,能够有效地为激光雷达散热,并提高激光雷达的可靠性。
11、在一些实施例中,壳体还包括:底盖,耦合至本体的远离环形凹入部的底部,并且具有底部通气孔。通过设置底部通气孔,能够在壳体中引入纵向流动的冷却气流,从而为设置在主安装支架上的诸如电路板等的各个部件提供有效散热。
12、在一些实施例中,相机安装支架呈环形结构,并且多个定位部沿相机安装支架的周向排布。以此方式,能够以简单可靠的方式为相机提供精确定位,并由此提高多个相机的装配精度。
13、在一种实施例中,主安装支架包括第一相机对齐结构,并且其中相机安装支架包括位于轴向上的一端的第二相机对齐结构,第二相机对齐结构适于与第一相机对齐结构耦合以将相机安装支架耦合至主安装支架。通过第一相机对齐结构和第二相机对齐结构,能够以简单的结构保证相机与激光雷达之间的装配精度,并进而提高数据采集的可靠性和精度。
14、在一些实施例中,装配组件还包括:云台安装支架,被布置在主安装支架上与相机安装支架相对的端部,并且其中驱动部件经由云台安装支架而固定至主安装支架,以经由主安装支架驱动多个相机和激光雷达沿转动轴线转动。通过使用云台安装支架,能够以简单可靠的方式保证驱动部件以及相机和激光雷达之间的位置关系。
15、在一些实施例中,驱动部件包括:云台转盘,适于从的底盖上的开口暴露于壳体的外部,并与底盖齐平,云台转盘适于与外部固定部件耦合,以将三维采集装置固定在外部固定部件上。云台转盘有利于将三维采集装置装配在诸如三脚架等的外部固定部件上,从而保证数据采集的稳定性和可靠性。
16、在一些实施例中,云台安装支架包括:一对安装体,基于装配组件的中心面对称地布置,以供驱动部件布置在其间,其中雷达法线和转动轴线位于中心面中。通过安装体能够以简单可靠的方式将驱动部件装配在主安装支架上,降低装配难度的同时提高了装配精度和效率。
17、在一些实施例中,主安装支架包括供气流通过的通孔。以此方式,能够进一步确保气流的通畅,尤其能够为电路板及其上的各部件提供有效地散热。
技术特征:
1.一种三维采集装置,包括:
2.根据权利要求1所述的三维采集装置,其中所述多个相机(202)的所述多条相机法线(2021)都位于法线面中,并且所述雷达法线(1011)与所述法线面成非零角度。
3.根据权利要求1所述的三维采集装置,其中所述多个相机(202)的所述相机视场(2022)与所述激光雷达(203)的所述雷达视场(2031)部分重叠。
4.根据权利要求1所述的三维采集装置,其中所述多个相机(202)被周向地布置在所述相机安装支架(102)的在周向上大于180°的范围内。
5.根据权利要求1所述的三维采集装置,还包括:
6.根据权利要求1-5中任一项所述的三维采集装置,还包括:
7.根据权利要求5所述的三维采集装置,其中所述本体还包括:
8.根据权利要求7所述的三维采集装置,其中所述本体还包括:
9.根据权利要求7所述的三维采集装置,其中所述本体还包括:
10.根据权利要求5所述的三维采集装置,所述壳体(201)还包括:
11.根据权利要求1-5和7-10中任一项所述的三维采集装置,其中所述相机安装支架(102)呈环形结构,并且所述多个定位部沿所述相机安装支架(102)的周向排布。
12.根据权利要求11所述的三维采集装置,其中所述主安装支架(101)包括第一相机对齐结构,并且
13.根据权利要求5所述的三维采集装置,所述装配组件(100)还包括:
14.根据权利要求13所述的三维采集装置,所述驱动部件(204)包括:
15.根据权利要求13所述的三维采集装置,其中所述云台安装支架(103)包括:
16.根据权利要求1-5、7-10和12-15中任一项所述的三维采集装置,其中所述主安装支架(101)包括供气流通过的通孔(1015)。
技术总结
本公开实施例提供了一种三维采集装置。三维采集装置包括:装配组件,包括:相机安装支架,并且包括多个定位部;主安装支架,耦合在相机安装支架的轴向端部,并且包括雷达安装部;激光雷达,被布置在雷达安装部上,并且适于获取以雷达法线为中心的雷达视场内的对象的点云数据;以及多个相机,被布置在相机安装支架的多个定位部中,并且适于各自沿相机安装支架的径向方向向外获取以沿径向方向延伸的相机法线为中心的相机视场内的对象的图像数据,其中多个相机被布置为多条相机法线相交于法线交点,并且法线交点在雷达法线上。根据本公开实施例的三维采集装置能够提高点云数据和图像数据融合的处理效率,并提高数据输出质量。
技术研发人员:刘俊霞,孙海涛
受保护的技术使用者:北京有竹居网络技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!