基于高精地图的GNSS定位方法及装置与流程
本发明涉及自动驾驶,尤其涉及一种基于高精地图的gnss定位方法及装置。
背景技术:
1、自动驾驶的定位技术系统依赖多传感器融合来获得高精度的定位输出,其中采用的滤波技术需要评估各个传感器的测量误差,一般通过协方差协矩阵表示,从而实现定位。传感器包括全球导航卫星系统gnss、惯性测量单元imu、轮速、激光雷达和摄像头等,其中gnss可以提供全局的定位信息,是车辆基于多传感器进行融合定位的重要组成部分。
2、gnss在开阔的地形精度较高,但是,当遇到大面积遮挡的场景比如收费站、龙门架、隧道等,如果解算不及时,gnss模块可能自身无法正确评估解算的误差(协方差),容易解算错误,以致输出的定位结果现漂移。另外,如果当前实际定位误差较大,gnss模块给出的协方差比实际小,定位系统会就会过分相信gnss给出的定位信息,从而导致自动驾驶的车辆定位出现偏差。
技术实现思路
1、本发明提供一种基于高精地图的gnss定位方法及装置,用以解决现有技术中受大面积遮挡场景的影响以致定位出现偏差的缺陷,提高解算精度,避免定位结果出现漂移,提高定位精度。
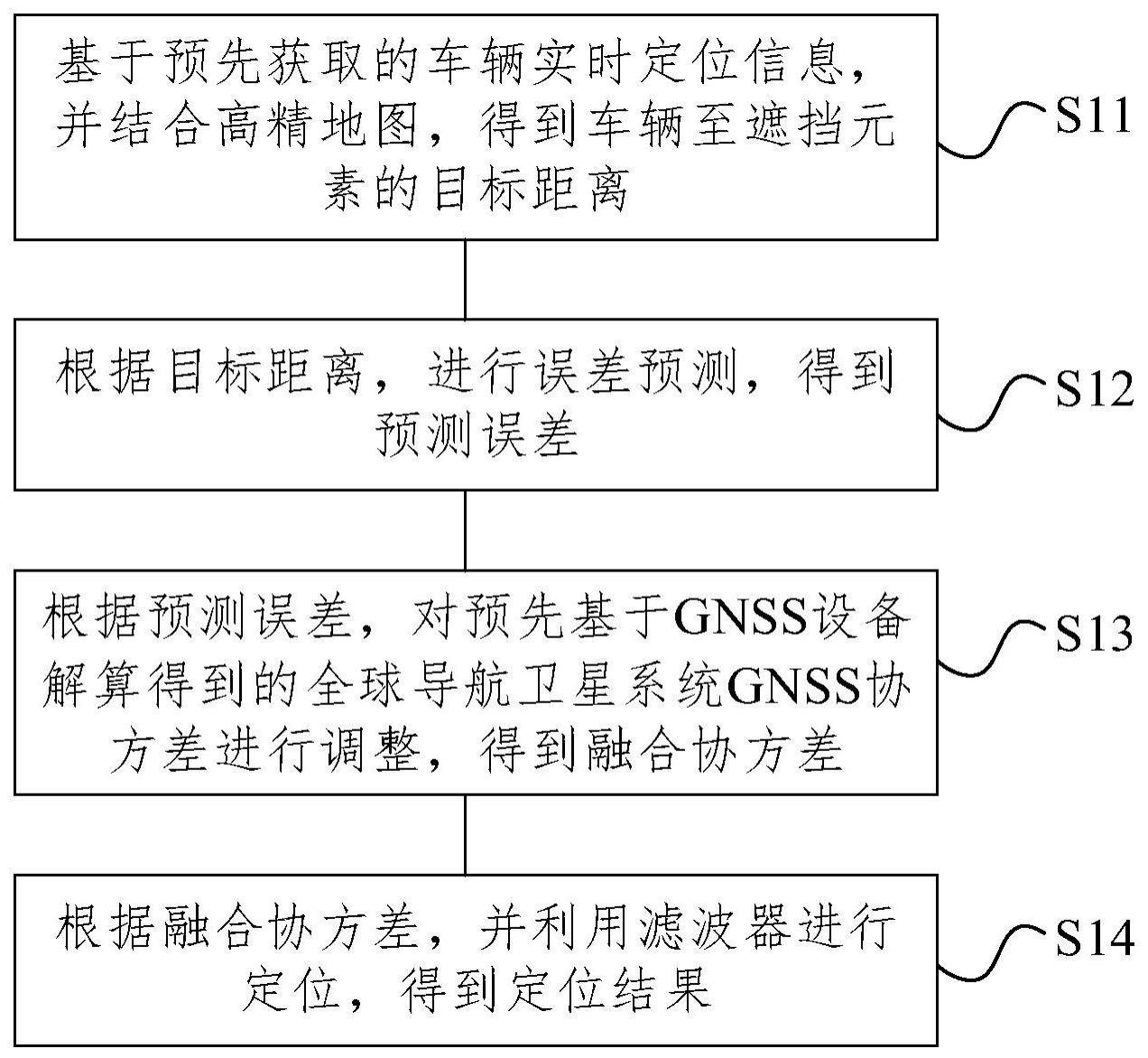
2、本发明提供一种基于高精地图的gnss定位方法,包括:基于预先获取的车辆实时定位信息,并结合高精地图,得到车辆至遮挡元素的目标距离;根据所述目标距离,进行误差预测,得到预测误差;根据所述预测误差,对预先基于gnss设备解算得到的全球导航卫星系统gnss协方差进行调整,得到融合协方差;根据所述融合协方差,并利用滤波器进行定位,得到定位结果。
3、根据本发明提供的一种基于高精地图的gnss定位方法,所述根据所述预测误差,对预先基于gnss设备解算得到的gnss协方差进行调整,得到融合协方差,包括:根据预设gnss误差协方差的权重系范围,对预先基于gnss设备解算得到的gnss协方差进行调整;根据调整后的gnss协方差,并结合预设gnss误差协方差的权重系范围、预设距离协方差转换系数和所述预测误差,得到融合协方差。
4、根据本发明提供的一种基于高精地图的gnss定位方法,所述根据所述目标距离,进行误差预测,得到预测误差,包括:将所述目标距离输入至误差预测模型,得到所述误差预测模型输出的预测误差;其中,所述误差预测模型是基于预先获取的gnss位置训练数据、所述gnss位置训练数据对应的真实位置以及所述真实位置至最近遮挡元素的训练距离数据训练得到的。
5、根据本发明提供的一种基于高精地图的gnss定位方法,训练所述误差预测模型,包括:获取gnss位置训练数据和所述gnss位置训练数据对应的真实位置;根据所述gnss位置训练数据和所述gnss位置训练数据对应的真实位置,得到gnss训练误差;根据所述gnss位置训练数据对应的真实位置,得到车辆至最近遮挡元素的训练距离数据;将所述训练距离数据作为待训练模型的输入数据,将所述gnss训练误差作为所述待训练模型的标签,对所述待训练模型进行训练,得到误差预测模型。
6、根据本发明提供的一种基于高精地图的gnss定位方法,所述获取gnss位置训练数据和所述gnss位置训练数据对应的真实位置,包括:获取gnss位置训练数据;根据所述gnss位置数据,利用图优化或rts平滑进行解算,得到所述gnss位置数据对应的真实数据。
7、根据本发明提供的一种基于高精地图的gnss定位方法,所述基于预先获取的车辆实时定位信息,并结合高精地图,得到车辆至遮挡元素的目标距离,包括:基于预先获取的车辆实时定位信息,查询高精地图,确定当前距离车辆最近的遮挡元素;根据所述车辆实时定位信息和所述当前距离车辆最近的遮挡元素,得到目标距离。
8、根据本发明提供的一种基于高精地图的gnss定位方法,所述根据所述车辆实时定位信息和所述当前距离车辆最近的遮挡元素,得到目标距离,包括:根据所述车辆实时定位信息,得到车辆运动学中心点;获取所述车辆运动学中心点与所述当前距离车辆最近的遮挡元素最近边的垂直距离,作为目标距离。
9、本发明还提供一种基于高精地图的gnss定位装置,包括:目标距离获取模块,基于预先获取的车辆实时定位信息,并结合高精地图,得到车辆至遮挡元素的目标距离;误差预测模块,根据所述目标距离,进行误差预测,得到预测误差;融合模块,根据所述预测误差,对预先基于gnss设备解算得到的全球导航卫星系统gnss协方差进行调整,得到融合协方差;定位模块,根据所述融合协方差,并利用滤波器进行定位,得到定位结果。
10、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述基于高精地图的gnss定位方法的步骤。
11、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述基于高精地图的gnss定位方法的步骤。
12、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述基于高精地图的gnss定位方法的步骤。
13、本发明提供的基于高精地图的gnss定位方法及装置,通过车辆实时定位信息,得到车辆至遮挡元素的目标距离,以根据车辆至遮挡元素的目标距离,进行误差预测,得到预测误差,从而利用预测误差对滤波器的gnss协方差进行调整,进而便于根据调整后得到的融合协方差进行定位,以减少因为大面积遮挡导致gnss解算错误造成的位置漂移或跳动对车辆整体定位的影响,提高车辆的定位精度。
技术特征:
1.一种基于高精地图的gnss定位方法,其特征在于,包括:
2.根据权利要求1所述的基于高精地图的gnss定位方法,其特征在于,所述根据所述预测误差,对预先基于gnss设备解算得到的gnss协方差进行调整,得到融合协方差,包括:
3.根据权利要求1所述的基于高精地图的gnss定位方法,其特征在于,所述根据所述目标距离,进行误差预测,得到预测误差,包括:
4.根据权利要求3所述的基于高精地图的gnss定位方法,其特征在于,训练所述误差预测模型,包括:
5.根据权利要求4所述的基于高精地图的gnss定位方法,其特征在于,所述获取gnss位置训练数据和所述gnss位置训练数据对应的真实位置,包括:
6.根据权利要求1所述的基于高精地图的gnss定位方法,其特征在于,所述基于预先获取的车辆实时定位信息,并结合高精地图,得到车辆至遮挡元素的目标距离,包括:
7.根据权利要求6所述的基于高精地图的gnss定位方法,其特征在于,所述根据所述车辆实时定位信息和所述当前距离车辆最近的遮挡元素,得到目标距离,包括:
8.一种基于高精地图的gnss定位装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述基于高精地图的gnss定位方法的步骤。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述基于高精地图的gnss定位方法的步骤。
技术总结
本发明提供一种基于高精地图的GNSS定位方法及装置,方法包括:基于预先获取的车辆实时定位信息,并结合高精地图,得到车辆至遮挡元素的目标距离;根据目标距离,进行误差预测,得到预测误差;根据预测误差,对滤波器的GNSS协方差进行调整,得到融合协方差;根据融合协方差,并利用滤波器进行定位,得到定位结果。本发明利用预测误差对滤波器的GNSS协方差进行调整,进而便于根据调整后得到的融合协方差进行定位,以减少因为大面积遮挡导致GNSS解算错误造成的位置漂移或跳动对车辆整体定位的影响,提高车辆的定位精度。
技术研发人员:潘力澜,江玲新,单泽泳,叶茂,刘健
受保护的技术使用者:嬴彻星创智能科技(上海)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!