航空结构件制孔空间位置误差的测量方法及修正方法与流程
本发明涉及飞机数字化装配制造领域,特别涉及一种航空结构件制孔空间位置误差的测量方法及修正方法。
背景技术:
1、作为典型航空结构件,飞机壁板装配是飞机制造中最重要的工艺环节之一,主要包括对壁板叠层结构按技术要求进行定位、制孔、连接等。以机身侧壁板为例,壁板通常由隔框、长桁、蒙皮、角片等组成。在壁板装配过程中,首先对隔框、长桁、蒙皮、角片进行定位和固定,然后通过铆接连接壁板各个零件。因此,在壁板装配过程中,需要加工数以万计的紧固件安装孔,人工制孔耗时费力,且制孔精度和一致性难以保证。鉴于工业机器人的低成本、高柔性和满意的制孔质量,机器人制孔系统在飞机制造领域得到大量应用。
2、在利用机器人制孔系统进行壁板制孔时,制孔系统及壁板的理论模型是制孔程序产生的基础,然而由于理论模型与其制孔现场实际状态并不一致,导致制孔位置误差的产生。通常将壁板制孔位置进行分区,每个制孔区域设置一定数量的基准孔,将制孔区域近似作为平面考虑,基于测量的基准孔坐标,采用线性插值的方法对基准孔覆盖范围内的制孔位置进行修正。然而由于蒙皮、隔框、角片的特殊位置关系,直接基于视觉系统测量角片上的基准孔,执行器与壁板会发生碰撞。因而,只能将基准孔选在蒙皮和长桁连接处,用与之近乎垂直的基准孔修正隔框和角片连接孔的制孔位置。另外,长桁上基准孔的z向偏差直接影响隔框与角片连接孔的边距控制质量。
3、有鉴于此,拟发明一种航空结构件制孔空间位置误差测量和修正方法,通过融合多传感器信息精确获取长桁上基准孔三维坐标,然后通过一种三维空间位置修正策略,实现隔框与角片连接孔的位置修正,提高壁板制孔精度和产品质量。
技术实现思路
1、本发明的主要目的是提出一种航空结构件制孔空间位置误差的测量方法及修正方法,旨在解决实际工程应用中机器人制孔系统和待制孔产品的理论模型与其制孔现场实际状态不一致导致存在制孔位置偏差的技术问题。
2、为实现上述目的,本发明提出了一种航空结构件制孔空间位置误差的测量方法,包括以下步骤:
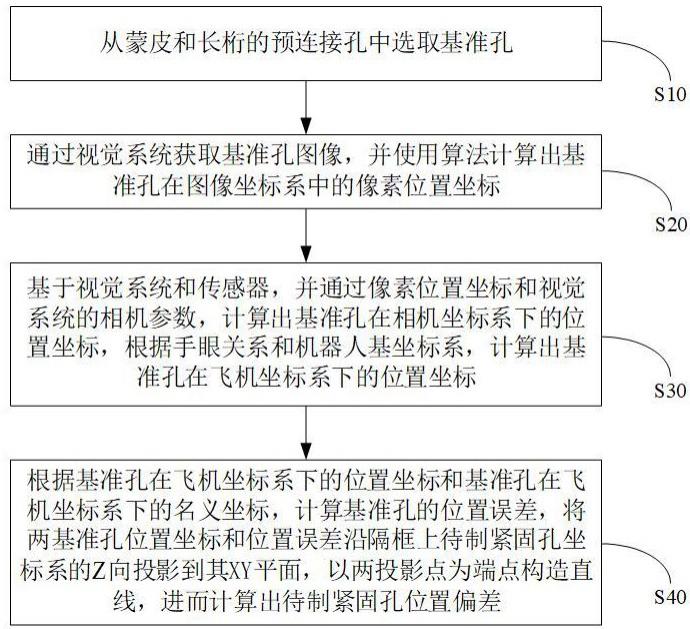
3、s10、从蒙皮和长桁的预连接孔中选取基准孔;
4、s20、通过视觉系统获取基准孔图像,并使用算法计算出基准孔在图像坐标系中的像素位置坐标;
5、s30、基于视觉系统和传感器,并通过像素位置坐标和视觉系统的相机参数,计算出基准孔在相机坐标系下的位置坐标,根据手眼关系和机器人基坐标系,计算出基准孔在飞机坐标系下的位置坐标;
6、s40、根据基准孔在飞机坐标系下的位置坐标和基准孔在飞机坐标系下的理论坐标,计算基准孔的位置误差。
7、可选地,所述步骤s20包括以下步骤:
8、s201、对基准孔图像的局部指数模式图像和视觉显著性图像进行线性加权融合,得到融合后的图像,完成基准孔特征纹理分割,;
9、其中,为基准孔原始图像的像素点坐标,为局部指数模式图像所占的权重比,为视觉显著性图像所占的权重比;
10、局部指数模式图像表示为;其中,为中心像素的像素值,为8邻域的像素值,n为邻域序号,对于预设阈值t,函数有如下定义:
11、;
12、视觉显著性图像表示为,其中,是原始基准孔图像的算术平均像素值,是原始基准孔图像的高斯滤波图像;
13、s202、采用canny边缘检测算法,对完成基准孔特征纹理分割的融合图像进行边缘检测和轮廓提取,作为纹理分割边界轮廓,基于测地曲率流驱动纹理分割边界轮廓优化,并对优化后轮廓的轮廓点进行椭圆拟合,获得基准孔在图像坐标系中的像素位置坐标。
14、可选地,所述步骤s202包括以下步骤:
15、基于原始基准孔图像和纹理分割边界轮廓,初始化图像基准孔水平集函数;
16、;
17、其中,用于求解图像中像素点到轮廓曲线的最短距离;
18、基于曲面演化方程对曲面进行演化,演化后曲面的0水平集即为优化后的轮廓;
19、;
20、其中,表示曲面函数的梯度,为测地曲率。
21、可选地,所述步骤s30包括以下步骤:
22、s301、通过与相机光轴平行安装的单个激光位移传感器,移动末端执行器使基准孔处在相机正焦物距上;
23、s302、基于所拍摄基准孔在图像坐标系中的像素位置坐标,结合相机内参数,计算基准孔在相机坐标系下的位置坐标,将基准孔在相机坐标系下的位置记为;
24、s303、将计算所得基准孔在飞机坐标系下的位置记为,根据手眼关系和机器人基坐标系,通过以下公式计算基准孔在飞机坐标系下的位置坐标;
25、;
26、其中,表示相机坐标系对于飞机坐标系的变换矩阵,其计算公式如下:
27、;
28、其中,表示机器人基坐标系相对于飞机坐标系的变换矩阵,为机器人制孔系统已知参数;为机器人制孔系统在机器人基坐标系下的位姿矩阵,由机器人前向运动学计算得到;为机器人制孔系统手眼关系矩阵,为机器人制孔系统已知参数。
29、可选地,所述步骤s40包括以下步骤:
30、s401、根据视觉系统所测长桁上基准孔在飞机坐标系下的坐标和,以及基准孔在飞机坐标系下的理论坐标和,计算基准孔位置误差和;
31、s402、将两基准孔位置坐标和,及其位置误差和,沿隔框上待制紧固孔坐标系的z向投影到其xy平面,得到相应的投影点和以及投影误差和;
32、s403、以两基准孔位置坐标和的投影点和为端点构造直线,基于以下公式计算隔框上第个待制紧固孔位置坐标的制孔位置偏差向量;
33、;
34、其中,是在和所构造的直线上的投影点。
35、本发明还提出了一种航空结构件制孔空间位置误差的修正方法,包括如上述的航空结构件制孔空间位置误差的测量方法;以及,
36、s50、根据制孔位置偏差向量,计算得到隔框上第个待制紧固孔修正后的制孔位置坐标,用以机器人制孔系统在隔框上进行紧固孔制孔;
37、其中,。
38、本发明的制孔空间位置误差的修正方法避免了基准孔测量时执行器与壁板发生碰撞,通过视觉系统和传感器的融合消除了单目视觉物距偏差产生的测量误差,对基准孔的三维坐标实现了精确获取,然后通过三维空间位置修正策略,实现隔框与角片连接孔的位置修正,提高壁板制孔精度和产品质量。
技术特征:
1.一种航空结构件制孔空间位置误差的测量方法,用于测量飞机侧壁板上制孔位置的误差,飞机侧壁板包括隔框、长桁、蒙皮和角片,其特征在于,测量方法包括以下步骤:
2.根据权利要求1所述的航空结构件制孔空间位置误差的测量方法,其特征在于,所述步骤s20包括以下步骤:
3.根据权利要求2所述的航空结构件制孔空间位置误差的测量方法,其特征在于,所述步骤s202包括以下步骤:
4.如权利要求1所述的一种航空结构件制孔空间位置误差的测量方法,其特征在于,所述步骤s30包括以下步骤:
5.如权利要求1所述的一种航空结构件制孔空间位置误差的测量方法,其特征在于,所述步骤s40包括以下步骤:
6.一种航空结构件制孔空间位置误差的修正方法,其特征在于,包括如权利要求1-5任一所述的航空结构件制孔空间位置误差的测量方法;以及,
技术总结
本发明提供一种航空结构件制孔空间位置误差的测量方法及修正方法,包括以下步骤:S10、从蒙皮和长桁的预连接孔中选取基准孔;S20、通过视觉系统获取基准孔图像,并使用算法计算出基准孔在图像坐标系中的像素位置坐标;S30、基于视觉系统和传感器,并通过像素位置坐标和视觉系统的相机参数,计算出基准孔在相机坐标系下的位置坐标,根据手眼关系和机器人基坐标系,计算出基准孔在飞机坐标系下的位置坐标;S40、根据基准孔在飞机坐标系下的位置坐标值和基准孔在飞机坐标系下的理论坐标值,计算基准孔的位置误差以及待制紧固孔位置偏差。
技术研发人员:田平风,傅云,梅标,孔繁强,朱伟东
受保护的技术使用者:浙江西子势必锐航空工业有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!