井下巡检系统和井下巡检点识别方法与流程
本发明涉及通信,尤其涉及一种井下巡检系统和井下巡检点识别方法。
背景技术:
1、随着智能化煤矿的改造,井下巡检机器人已经在煤矿井下有了很多的应用,巡检机器人可以代替人对指定设备进行巡检,及时地发现煤矿井下设备的安全隐患。目前的巡检机器人是按照监控平台的指令,定期的对定点的设备进行巡检,在巡检的过程中需要对巡检点进行精确的定位,为了实现对巡检点的准确定位,目前的巡检机器人会借助巡检机器人上设置的编码器来进行确定机器人的巡检位置或者通过射频识别标识(radiofrequencyidentification,rfid)读取贴在导轨上的rfid标识码来确定当前的位移数据。
2、但是,由于编码器在巡检过程中由于存在轮子打滑空转或震动等原因,造成编码器的位移数据并不能如实反映当前机器人的真实位置,导致巡检点偏差问题的存在,不能保证巡检机器人到达指定的位置进行巡检,从而使得巡检的效果并不理想。针对另一种解决方案的缺陷是:由于井下环境复杂,rfid标识码会受到环境的影响出现无法识别的现象,所以有可能无法通过rfid读取贴在导轨上的rfid标识码来确定当前的位移数据。
3、为此,亟需提供一种安全可靠的井下巡检点识别方案来准确定位井下待巡检点。
技术实现思路
1、本发明的目的在于提供一种井下巡检系统和井下巡检点识别方法,用以采用非接触无电气连接实现巡检点位置信号的采集,既安全防爆,又能够实现井下巡检机器人的准确定位。
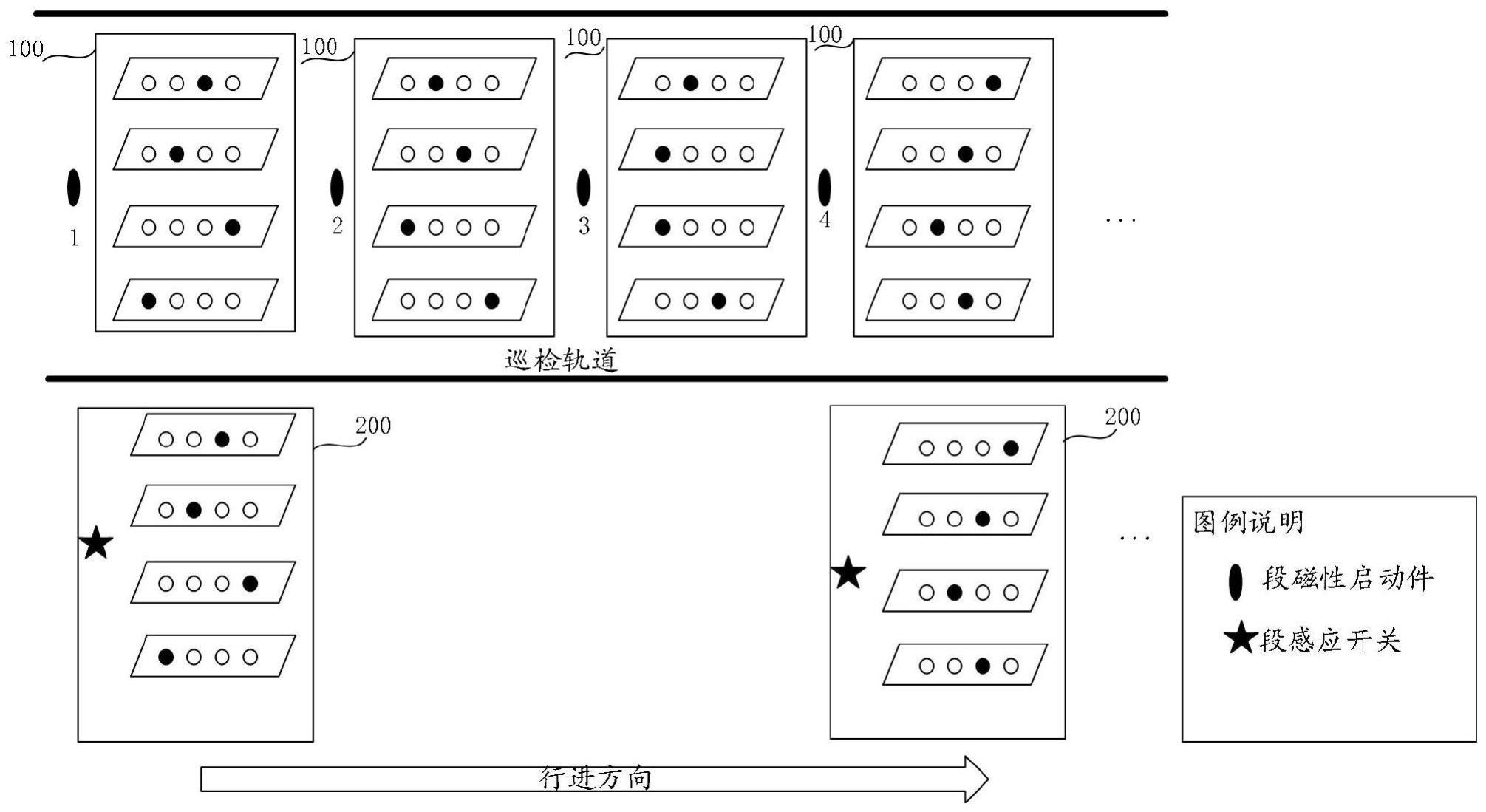
2、第一方面,本发明提供一种井下巡检系统,包括:n个位置编码模块和巡检机器人,其中:所述n个位置编码模块在巡检轨道中呈阵列排布;不同的位置编码模块所固定的位置不同,且每个位置编码模块具有唯一的磁性点阵编码;所述巡检机器人上设有磁阻感测装置,巡检机器人沿巡检轨道运动,当所述磁阻感测装置上的段感应开关检测到所述巡检轨道上的段磁性启动件时,触发所述磁阻感测装置上的磁感应开关阵列读取当前位置编码模块的磁性点阵编码,根据所述磁性点阵编码判定当前位置是否为指定巡检点。
3、本发明提供的井下巡检系统的有益效果在于:井下巡检机器人可借助位置编码模块上的磁性点阵编码,实现对巡检点的准确定位,由于在定位过程中采用了磁感应技术,即采用非接触无电气连接实现巡检点位置信号的采集,也能够满足井下防爆的安全要求。
4、一种可能的实施例中,上述方法还包括:所述磁阻感测装置上的磁感应开关阵列包括至少两个磁性感应层,每个磁性感应层包括多个磁感应开关,其中,两个磁感应开关的间距要大于磁感应开关的最小感应间距。本实施例中,两个磁感应开关的间距要大于磁感应开关的最小感应间距,可以避免一个巡检点的磁性启动件造成两个磁感应开关的状态变化。
5、另一种可能的实施例中,每个所述位置编码模块的材料为无源磁性材料,每个所述位置编码模块包括至少两个磁性层,相邻的磁性层之间采用阻磁材料进行隔离。位置编码模块由多个无源的磁性材料组成,按照约定好的阵列布局,安全防爆。本实施例采用分层分段的方式部署位置编码模块来实现对每个巡检点唯一性编码,非接触无电气连接实现巡检点位置信号的采集,既安全防爆,又能够实现井下巡检机器人准确定位待巡检点,分层分段的方式能够避免磁性材料之间的相互影响,避免造成数据错误。
6、其它可能的实施例中,每个位置编码模块的旁侧均对应设置一段磁性启动件,相邻的位置编码模块之间的距离大于磁感应开关的最小感应间距,这样能够避免磁性材料之间的相互影响,避免造成数据错误。
7、在一种可能的实施例中,所述段磁性启动件与所述磁性层不在同一水平面。能够避免磁性层中的圆形无源磁铁对段磁性启动件造成磁性干扰。
8、一种可能的实施例中,当所述磁阻感测装置上的段感应开关检测到所述巡检轨道上的段磁性启动件时,还触发所述磁阻感测装置上的段计数器启动计数;所述巡检机器人还用于:当段计数器的计数值达到设定数值时,清零所述段计数器的计数值,所述设定数值表示所述巡检机器人完成了巡检轨道中全部巡检点的磁性点阵编码的读取。
9、一种可能的实施例中,所述磁感应开关的感应间距取值范围为[20mm,40mm],磁感应开关的最小感应间距通常为20mm。
10、一种可能的实施例中,所述磁性层中设有圆形的无源磁铁。
11、第二方面,本发明实施例还提供一种井下巡检点识别方法,应用于巡检机器人,该方法包括:当巡检机器人沿巡检轨道运动时,控制段感应开关对所述巡检轨道上的段磁性启动件进行检测;当检测到所述巡检轨道上的段磁性启动件时,触发所述磁阻感测装置上的磁感应开关阵列读取巡检轨道上当前的位置编码模块的磁性点阵编码;根据所述磁性点阵编码判定当前位置是否为指定巡检点。
12、另一种可能的实施例中,当检测到所述巡检轨道上的段磁性启动件时,触发所述磁阻感测装置上的磁感应开关阵列读取当前位置编码模块的磁性点阵编码,包括:当所述巡检机器人的前后两端的段感应开关均检测到所述巡检轨道上的段磁性启动件时,触发所述磁阻感测装置上的磁感应开关阵列读取当前位置编码模块的磁性点阵编码。
13、其它可能的实施例中,该方法还包括:当所述磁阻感测装置上的段感应开关检测到所述巡检轨道上的段磁性启动件时,还触发所述磁阻感测装置上的段计数器启动计数;当段计数器的计数值达到设定数值时,清零所述段计数器的计数值,所述设定数值表示所述巡检机器人完成了巡检轨道中全部巡检点的磁性点阵编码的读取。
14、又一种可能的实施例中,触发所述磁阻感测装置上的磁感应开关阵列读取当前位置编码模块的磁性点阵编码,包括:当段感应开关感应到段磁性启动件时,触发所述磁阻感测装置上的磁感应开关阵列工作并读取当前位置编码模块的磁性点阵编码,当段感应开关感应不到所述段磁性启动件时,屏蔽掉所述磁感应开关阵列之后的读取信息。这样,在读取编码时采用段感应开关的置位与消失来启动或关闭磁感应开关阵列的检测,解决了同一个平面不同的磁检测开关在巡检移动过程中磁感应开关对非对应检测开关的干扰,造成读取数据的错误,保证读取的编码的完整性及正确性。
15、本发明提供的井下巡检点识别方法的有益效果在于:井下巡检机器人可借助对位置编码模块上的磁性点阵编码的识别,实现对巡检点的准确定位,由于在定位过程中采用了磁感应技术,即采用非接触无电气连接实现巡检点位置信号的采集,也能够满足井下防爆的安全要求。
技术特征:
1.一种井下巡检系统,其特征在于,包括:n个位置编码模块和巡检机器人,其中:
2.根据权利要求1所述的井下巡检系统,其特征在于,所述磁阻感测装置上的磁感应开关阵列包括至少两个磁性感应层,每个磁性感应层包括多个磁感应开关,其中,两个磁感应开关的间距要大于磁感应开关的最小感应间距。
3.根据权利要求1所述的井下巡检系统,其特征在于,每个所述位置编码模块的材料为无源磁性材料,每个所述位置编码模块包括至少两个磁性层,相邻的磁性层之间采用阻磁材料进行隔离。
4.根据权利要求3所述的井下巡检系统,其特征在于,每个位置编码模块的旁侧均对应设置一段磁性启动件,相邻的位置编码模块之间的距离大于磁感应开关的最小感应间距。
5.根据权利要求4所述的井下巡检系统,其特征在于,所述段磁性启动件与所述磁性层不在同一水平面。
6.根据权利要求2至5任一项所述的井下巡检系统,其特征在于,当所述磁阻感测装置上的段感应开关检测到所述巡检轨道上的段磁性启动件时,还触发所述磁阻感测装置上的段计数器启动计数;
7.一种井下巡检点识别方法,应用于巡检机器人,其特征在于,包括:
8.根据权利要求7所述方法,其特征在于,当检测到所述巡检轨道上的段磁性启动件时,触发所述磁阻感测装置上的磁感应开关阵列读取当前位置编码模块的磁性点阵编码,包括:
9.根据权利要求7所述方法,其特征在于,还包括:
10.根据权利要求7至9任一项所述方法,其特征在于,触发所述磁阻感测装置上的磁感应开关阵列读取当前位置编码模块的磁性点阵编码,包括:
技术总结
本发明提供了一种井下巡检系统和井下巡检点识别方法,该井下巡检系统包括:N个位置编码模块和巡检机器人,其中:所述N个位置编码模块在巡检轨道中呈阵列排布;不同的位置编码模块所固定的位置不同,且每个位置编码模块具有唯一的磁性点阵编码;所述巡检机器人上设有磁阻感测装置,巡检机器人沿巡检轨道运动,当所述磁阻感测装置上的段感应开关检测到所述巡检轨道上的段磁性启动件时,触发所述磁阻感测装置上的磁感应开关阵列读取当前位置编码模块的磁性点阵编码,根据所述磁性点阵编码判定当前位置是否为指定巡检点。该井下巡检系统采用非接触无电气连接实现巡检点位置信号的采集,既安全防爆,又能够实现井下巡检机器人的准确定位。
技术研发人员:王浩,张朝平,黄宗林,王教阳
受保护的技术使用者:上海山源电子科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!