基于车体横向振动加速度的晃车检测方法及系统与流程
本发明涉及轨道车辆,尤其涉及一种基于车体横向振动加速度的晃车检测方法及系统。
背景技术:
1、在轨道列车的服役过程中,由于轮轨匹配关系可能发生变化,在部分线路或部分区段可能会存在轮轨匹配不良、等效锥度偏低等情况,从而可能导致动车组出现车体低频横向晃车现象,影响行车安全性和乘车舒适性。
2、对于车体的低频横向晃车监测,在目前的相关技术中,是通过车体横向加速度计算车体的横向平稳性来进行监测,但是这种方法存在如下缺点:由于横向平稳性在低频处(一般在0.5-3hz之间)的加权系数较低,因此在发生晃车时,横向平稳性指标体现不明显,横向平稳性指标会存在部分没有超过横向平稳性的限值的情况,即无法发出平稳性报警。如果降低横向平稳性的报警限值,在通过车站、道岔等区段,车辆发生轻微振动时,又可能由于横向平稳性指标较大,从而引起横向平稳性误报警问题。因此仅通过横向平稳性指标,无法实现既可以有效的识别晃车现象,同时又保证在通过车站、道岔等区段时不发生误报的效果。
技术实现思路
1、本发明提供一种基于车体横向振动加速度的晃车检测方法及系统,用以解决现有技术中无法实现既可以有效的识别晃车现象,同时又保证在通过车站、道岔等区段时不发生误报的缺陷,实现快速、高效、准确的识别低频晃车现象的实时诊断。
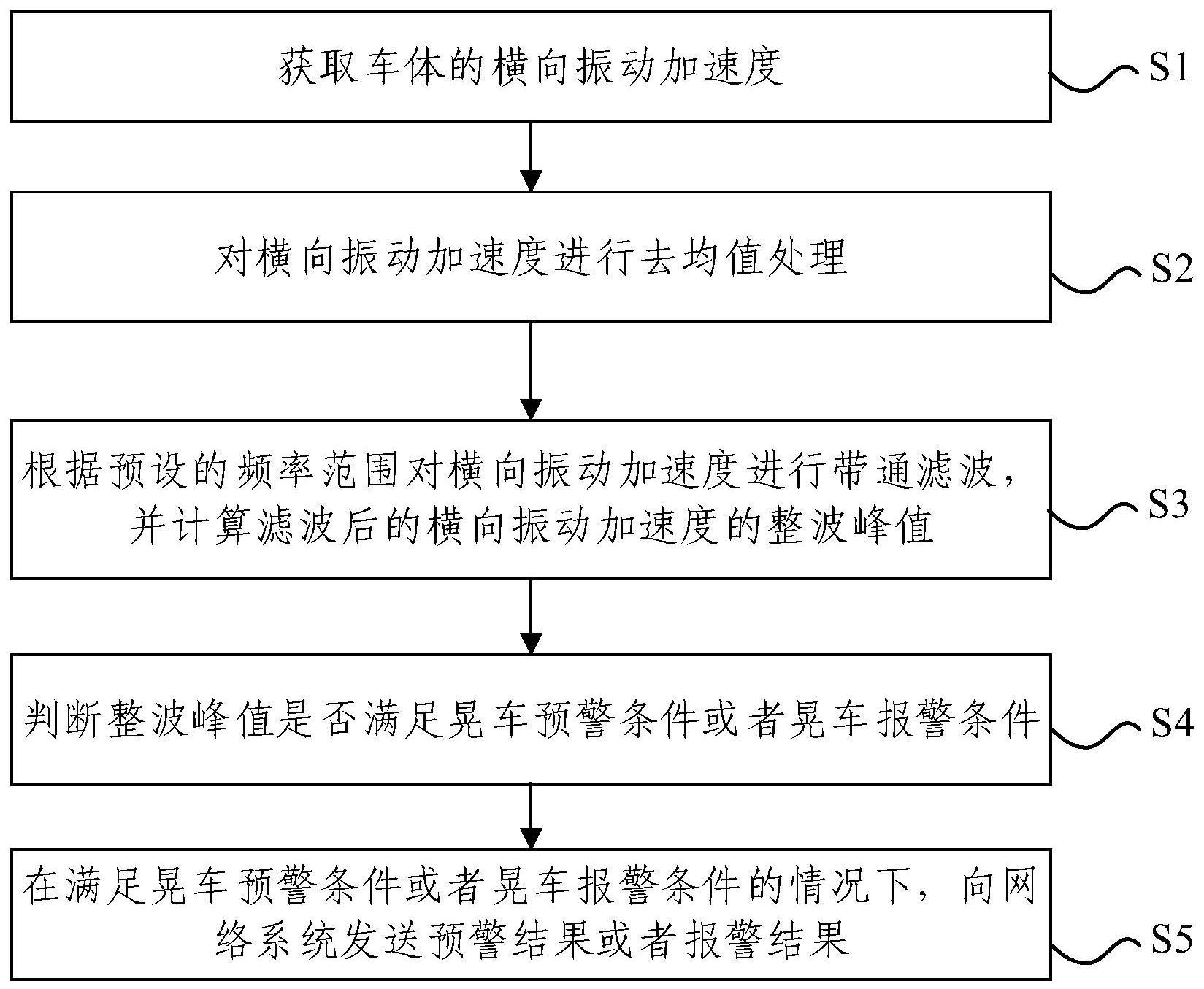
2、本发明提供一种基于车体横向振动加速度的晃车检测方法,包括:
3、获取车体的横向振动加速度;
4、对所述横向振动加速度进行去均值处理;
5、根据预设的频率范围对所述横向振动加速度的谐波进行带通滤波,并计算带通滤波后的所述谐波的整波峰值,所述频率范围是根据所述车体的悬挂参数,计算所述车体在运动姿态下的悬挂模态,并根据所述悬挂模态确定的;
6、判断所述整波峰值是否满足晃车预警条件或者晃车报警条件。
7、根据本发明提供的基于车体横向振动加速度的晃车检测方法,判断所述整波峰值是否满足晃车预警条件或者晃车报警条件,具体包括:
8、在所述整波峰值在预设周期内超过晃车阈值的次数多于预定次数的情况下,判定所述整波峰值满足所述晃车预警条件或者所述晃车报警条件。
9、根据本发明提供的基于车体横向振动加速度的晃车检测方法,所述晃车阈值包括两个第一阈值和两个第二阈值,所述第一阈值为晃车预警阈值,所述第二阈值为晃车报警阈值,所述第一阈值的绝对值小于所述第二阈值的绝对值。
10、根据本发明提供的基于车体横向振动加速度的晃车检测方法,在所述整波峰值在预设周期内超过晃车阈值的次数多于预定次数的情况下,判定所述整波峰值满足所述晃车预警条件或者所述晃车报警条件,具体包括:
11、在所述整波峰值在预设周期内超过所述第一阈值的次数多于预定次数,且超过所述第二阈值的次数少于预定次数的情况下,判定所述整波峰值满足所述晃车预警条件;
12、在所述整波峰值在预设周期内超过所述第二阈值的次数多于预定次数的情况下,判定所述整波峰值满足所述晃车报警条件。
13、根据本发明提供的基于车体横向振动加速度的晃车检测方法,所述运动姿态包括摇头、上心滚摆、下心滚摆和横移中的至少一种姿态。
14、根据本发明提供的基于车体横向振动加速度的晃车检测方法,在判断所述整波峰值是否满足晃车预警条件或者晃车报警条件之后,还包括:
15、在满足所述晃车预警条件或者所述晃车报警条件的情况下,向网络系统发送预警结果或者报警结果。
16、本发明还提供一种基于车体横向振动加速度的晃车检测系统,包括平稳传感器和平稳监测主机;
17、所述平稳传感器与所述平稳监测主机电连接,用于采集车体的横向振动加速度,并将采集到的所述横向振动加速度传输给所述平稳监测主机;
18、所述平稳监测主机用于获取车体的横向振动加速度,对所述横向振动加速度进行去均值处理;根据预设的频率范围对所述横向振动加速度的谐波进行带通滤波,并计算带通滤波后的所述谐波的整波峰值,所述频率范围是根据所述车体的悬挂参数,计算所述车体在运动姿态下的悬挂模态,并根据所述悬挂模态确定的;判断所述整波峰值是否满足晃车预警条件或者晃车报警条件。
19、根据本发明提供的基于车体横向振动加速度的晃车检测系统,所述平稳传感器包括加速度传感器、连接电缆和连接器;所述加速度传感器通过连接电缆和连接器与所述平稳监测主机电连接。
20、根据本发明提供的基于车体横向振动加速度的晃车检测系统,所述加速度传感器固定安装于所述车体下方距离转向架中心一侧1000mm的端部底架上,纵向的安装范围为-550mm至+550mm,横向的安装范围为朝向所述车体的中心方向的0mm至1500mm。
21、根据本发明提供的基于车体横向振动加速度的晃车检测系统,所述平稳监测主机还用于向网络系统发送预警结果或者报警结果。
22、本发明提供的基于车体横向振动加速度的晃车检测方法及系统,通过获取车体的横向振动加速度,并对横向振动加速度进行去均值处理,再根据预设的频率范围对横向振动加速度的谐波进行带通滤波,并计算带通滤波后的谐波的整波峰值,频率范围是根据车体的悬挂参数,计算车体在运动姿态下的悬挂模态,并根据悬挂模态确定的,最后判断整波峰值是否满足晃车预警条件或者晃车报警条件,实现了既能有效识别晃车现象,又能避免车体在经过车站、道岔等区段的易误报问题的效果,算法简单,计算效率高,实现了快速、高效、准确的对低频晃车现象的实时诊断。
技术特征:
1.一种基于车体横向振动加速度的晃车检测方法,其特征在于,包括:
2.根据权利要求1所述的基于车体横向振动加速度的晃车检测方法,其特征在于,判断所述整波峰值是否满足晃车预警条件或者晃车报警条件,具体包括:
3.根据权利要求2所述的基于车体横向振动加速度的晃车检测方法,其特征在于,所述晃车阈值包括两个第一阈值和两个第二阈值,所述第一阈值为晃车预警阈值,所述第二阈值为晃车报警阈值,所述第一阈值的绝对值小于所述第二阈值的绝对值。
4.根据权利要求3所述的基于车体横向振动加速度的晃车检测方法,其特征在于,在所述整波峰值在预设周期内超过晃车阈值的次数多于预定次数的情况下,判定所述整波峰值满足所述晃车预警条件或者所述晃车报警条件,具体包括:
5.根据权利要求1所述的基于车体横向振动加速度的晃车检测方法,其特征在于,所述运动姿态包括摇头、上心滚摆、下心滚摆和横移中的至少一种姿态。
6.根据权利要求1所述的基于车体横向振动加速度的晃车检测方法,其特征在于,在判断所述整波峰值是否满足晃车预警条件或者晃车报警条件之后,还包括:
7.一种基于车体横向振动加速度的晃车检测系统,其特征在于,包括平稳传感器和平稳监测主机;
8.根据权利要求7所述的基于车体横向振动加速度的晃车检测系统,其特征在于,所述平稳传感器包括加速度传感器、连接电缆和连接器;所述加速度传感器通过所述连接电缆和所述连接器与所述平稳监测主机电连接。
9.根据权利要求8所述的基于车体横向振动加速度的晃车检测系统,其特征在于,所述加速度传感器固定安装于所述车体下方距离转向架中心一侧1000mm的端部底架上,纵向的安装范围为-550mm至+550mm,横向的安装范围为朝向所述车体的中心方向的0mm至1500mm。
10.根据权利要求7所述的基于车体横向振动加速度的晃车检测系统,其特征在于,所述平稳监测主机还用于向网络系统发送预警结果或者报警结果。
技术总结
本发明涉及轨道车辆技术领域,提供一种基于车体横向振动加速度的晃车检测方法及系统,通过获取车体的横向振动加速度,并对横向振动加速度进行去均值处理,再根据预设的频率范围对横向振动加速度的谐波进行带通滤波,并计算带通滤波后的谐波的整波峰值,最后判断整波峰值是否满足晃车预警条件或者晃车报警条件,解决了现有技术中无法实现既能有效的识别晃车现象,又能保证在通过车站、道岔等区段时不发生误报的问题,实现了既能有效识别晃车现象,又能避免易误报问题的效果,算法简单,计算效率高,实现了快速、高效、准确的对低频晃车现象的实时诊断。
技术研发人员:张志波,张振先,冯永华,冯扬,周橙
受保护的技术使用者:中车青岛四方机车车辆股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!