本发明涉及智能网联汽车定位,具体为一种智能车gps信号丢失情况下的多imu定位方法。
背景技术:
1、智能网联汽车是指采用各种传感器和人工智能的手段达到自动驾驶、避障、规划路线等,综合了感知、定位、决策、控制技术,形成的技术原理先进、具有新技术、新结构的汽车。
2、发展智能网联汽车是我国从汽车大国迈向汽车强国的必由之路。是应对道路拥堵,避免交通事故的战略举措,已成为当前世界各国争相发展的重点。智能网联汽车具有共享性、开放性和智能性等优点,是最具有发展前途和潜力的汽车发展的必由之路。定位是其实现车联网以及做出各种规划决策方案的前提之一,会直接影响智能网联汽车的决策正确性和安全性,而实际驾驶中,各个道路并不是都能完全被卫星覆盖,gps信号丢失情况下定位的安全性和准确性就大大降低,因此针对gps信号丢失情况下的定位精确性需要进一步提高,以保证汽行驶的安全性。
技术实现思路
1、本发明提供了一种智能车gps信号丢失情况下的多imu定位方法,具备针对gps信号丢失情况下的提供定位的精确性及保证汽行驶安全性的优点,解决了gps信号丢失下对智能汽车实现更高精度的定位,降低在价格上,和算法上的消耗,为大众解决实际中gps信号丢失情况下的汽车定位难的问题。
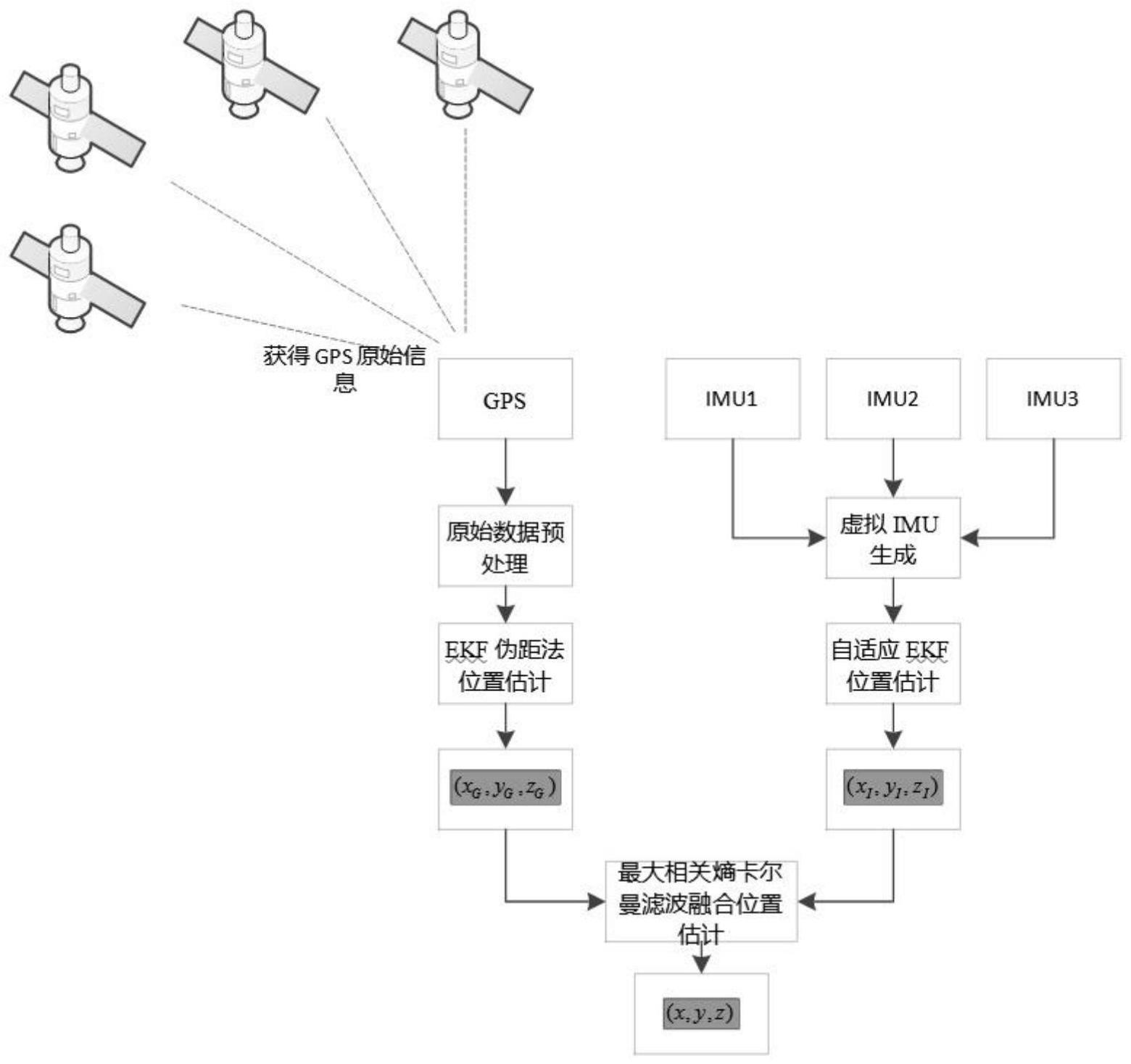
2、为实现以上目的,本发明提供如下技术方案予以实现:一种智能车gps信号丢失情况下的多imu定位方法,首先通过卫星的伪距信息和星历信息针对gps采用伪距法定位并用扩展卡尔曼滤波对其进行预测输出一个位置信息(xg,yg,zg);同时,对多个imu进行虚拟融合,在与gps融合前,先对多个imu的加速度和角速度进行融合,融合后将其利用旋转矩阵实现imu的坐标变化,然后对imu进行自适应扩展卡尔曼滤波预测,输出多imu下的位置信息(xi,yi,zi);最后将gps和imu利用最大相关熵卡尔曼滤波进行融合,输出位置信息(x,y,z)。
3、可选的,包括以下步骤:
4、s1:同时获取gps的伪距信息和星历信息,融合多个imu转换为虚拟imu;
5、s2:对gps进行扩展卡尔曼滤波位置估计,输出gps坐标下的位置信息;对虚拟imu进行自适应扩展卡尔曼滤波位置估计,获得虚拟imu下的位置信息;
6、s3:利用最大相关熵卡尔曼滤波融合gps和虚拟imu获得最终位置。
7、可选的,s1中星历信息和伪距的获取设计为:
8、从车辆gps原始数据中直接提取星历信息和伪距信息,
9、对s1中多个imu融合成一个虚拟imu:
10、
11、
12、
13、
14、其中,t*表示dcm旋转矩阵,θ,φ,ψ为单个imu输出的欧拉角,ωm是对每个imu输出角速读融合后的方差,am是对多个加速度融合后的方差。
15、可选的,对s2中gps扩展卡尔曼滤波方案设计为:
16、状态方程和观测方程设计为:
17、
18、扩展卡尔曼滤波预测方程设计为:
19、
20、
21、扩展卡尔曼滤波更新方程设计为:
22、
23、
24、
25、
26、其中,是k时刻的gps输出的位置;a是状态方程的雅克比行列式;c是观测ρ的雅克比行列式,r是测量噪声vk的协方差,根据经验设定;kk表示(r,pk)中每个协方差值的卡尔曼增益值;是k1时刻的后验状态估计;是同一时间步长的后验预测误差估计,获得gps伪距定位的位置信息(xg,yg,zg);
27、对s2中虚拟imu定位方案设计为:
28、状态方程和观测方程为,
29、
30、其中,[ψ,θ,φ]分别表示imu输出的俯仰偏航和滚转角;
31、自适应扩展卡尔曼滤波预测方程设计为:
32、
33、
34、设置自适应阈值:
35、
36、
37、自适应过程噪声和测量噪声计算:
38、rk+1=(1-qk)rk+qk([i-ckkk]vkvkt[i-ckkk]t+ckpkckt,
39、
40、自适应扩展卡尔曼滤波更新方程设计为:
41、
42、
43、
44、
45、其中,a是dcm旋转矩阵的雅克比行列式,c是欧拉角的雅克比行列式,r是欧拉角误差协方差,根据经验设定;σi是imu的噪声频谱幅度,t是定位时间间隔;输出imu位置信息(xi,yi,zi)。
46、可选的,对s3中利用最大相关熵卡尔曼滤波将gps和虚拟imu数据进行融合方案为:
47、最大相关熵卡尔曼滤波预测方程设计为:
48、
49、
50、定义核函数:
51、
52、
53、最大相关熵卡尔曼滤波更新方程设计为:
54、
55、
56、
57、其中,rg和ri分别是gps定位和imu定位步骤的测量噪声协方差,σ是核函数的带宽,设为1。
58、本发明提供了一种智能车gps信号丢失情况下的多imu定位方法,具备以下有益效果:
59、该智能车gps信号丢失情况下的多imu定位方法,利用多imu将gps和imu分别进行先一步滤波已达到更精确的位置信息,利用虚拟imu的特性,减小在实际车辆运行中的运算损耗,降低计算资源的消耗,采用的最大相关熵卡尔曼滤波将gps和虚拟imu的位置信息融合,以达到适应更多噪声环境下gps信号丢失情况下的车辆定位,本发明解决在多噪声环境中,gps信号丢失情况下,利用多个imu达到安全的可靠的定位精度,使车辆安全的行驶出无gps信号地带。
技术特征:1.一种智能车gps信号丢失情况下的多imu定位方法,其特征在于:首先通过卫星的伪距信息和星历信息针对gps采用伪距法定位并用扩展卡尔曼滤波对其进行预测输出一个位置信息(xg,yg,zg);同时,对多个imu进行虚拟融合,在与gps融合前,先对多个imu的加速度和角速度进行融合,融合后将其利用旋转矩阵实现imu的坐标变化,然后对imu进行自适应扩展卡尔曼滤波预测,输出多imu下的位置信息(xi,yi,zi);最后将gps和imu利用最大相关熵卡尔曼滤波进行融合,输出位置信息(x,y,z)。
2.根据权利要求1所述的一种智能车gps信号丢失情况下的多imu定位方法,其特征在于:包括以下步骤:
3.根据权利要求2所述的一种智能车gps信号丢失情况下的多imu定位方法,其特征在于:s1中星历信息和伪距的获取设计为:
4.根据权利要求2所述的一种智能车gps信号丢失情况下的多imu定位方法,其特征在于:对s2中gps扩展卡尔曼滤波方案设计为:
5.根据权利要求2所述的一种智能车gps信号丢失情况下的多imu定位方法,其特征在于:对s3中利用最大相关熵卡尔曼滤波将gps和虚拟imu数据进行融合方案为:
技术总结本发明涉及智能网联汽车定位技术领域,且公开了一种智能车GPS信号丢失情况下的多IMU定位方法,首先通过卫星的伪距信息和星历信息针对GPS采用伪距法定位并用扩展卡尔曼滤波对其进行预测输出一个位置信息(x<subgt;G</subgt;,y<subgt;G</subgt;,z<subgt;G</subgt;)。该智能车GPS信号丢失情况下的多IMU定位方法,利用多IMU将GPS和IMU分别进行先一步滤波已达到更精确的位置信息,利用虚拟IMU的特性,减小了在实际车辆运行中的运算损耗,降低了计算资源的消耗,采用的最大相关熵卡尔曼滤波将GPS和虚拟IMU的位置信息融合,以达到适应更多噪声环境下GPS信号丢失情况下的车辆定位,本发明解决了在多噪声环境中,GPS信号丢失情况下,利用多个IMU达到安全的可靠的定位精度,使车辆安全的行驶出无GPS信号地带。
技术研发人员:付主木,刘雨轩,司鹏举,陶发展,马浩翔,王楠,朱龙龙,王永强,冀保峰,张中才,唐小林
受保护的技术使用者:河南科技大学
技术研发日:技术公布日:2024/1/13