一种室内定位方法、装置、设备及存储介质
本发明涉及计算机,尤其涉及一种室内定位方法、装置、设备及存储介质。
背景技术:
1、随着城市现代化进程的发展,人们对于基于室内位置的服务的需求日益强烈,如大型室内环境中提供智能路线规划、精准广告投放以及附近餐厅推荐等。然而,由于城市峡谷效应以及多径效应的干扰,卫星导航系统在室内场景会出现严重的信号衰减问题,导致gps无法提供精确的位置信息。因此,设计一种低成本、高鲁棒性的室内定位方法是具有重大意义的。
2、现有技术中,行人航位推算(pedes tr ian dead reckoning,pdr)算法称得上是一个出色的定位算法,它可以不依赖于外部测量源信息,如卫星、射频信号等,定位成本极低。但是,随着时间的推移,pdr算法存在误差累积问题,定位精度会逐渐降低,效果非常的不理想。
3、因此,如何提高室内定位精度,是目前亟需解决的技术问题。
技术实现思路
1、本发明主要目的在于提供一种室内定位方法、装置、设备及存储介质,通过数据驱动的方式完成回波指纹的特征提取,并利用深度学习的方式进行回波分类,通过回波定位信息对pdr位置解算信息进行修正,不仅无需部署任何额外的硬件设施,而且可以较好的解决pdr的误差累积问题,以低成本的代价实现了亚米级的室内定位精度。
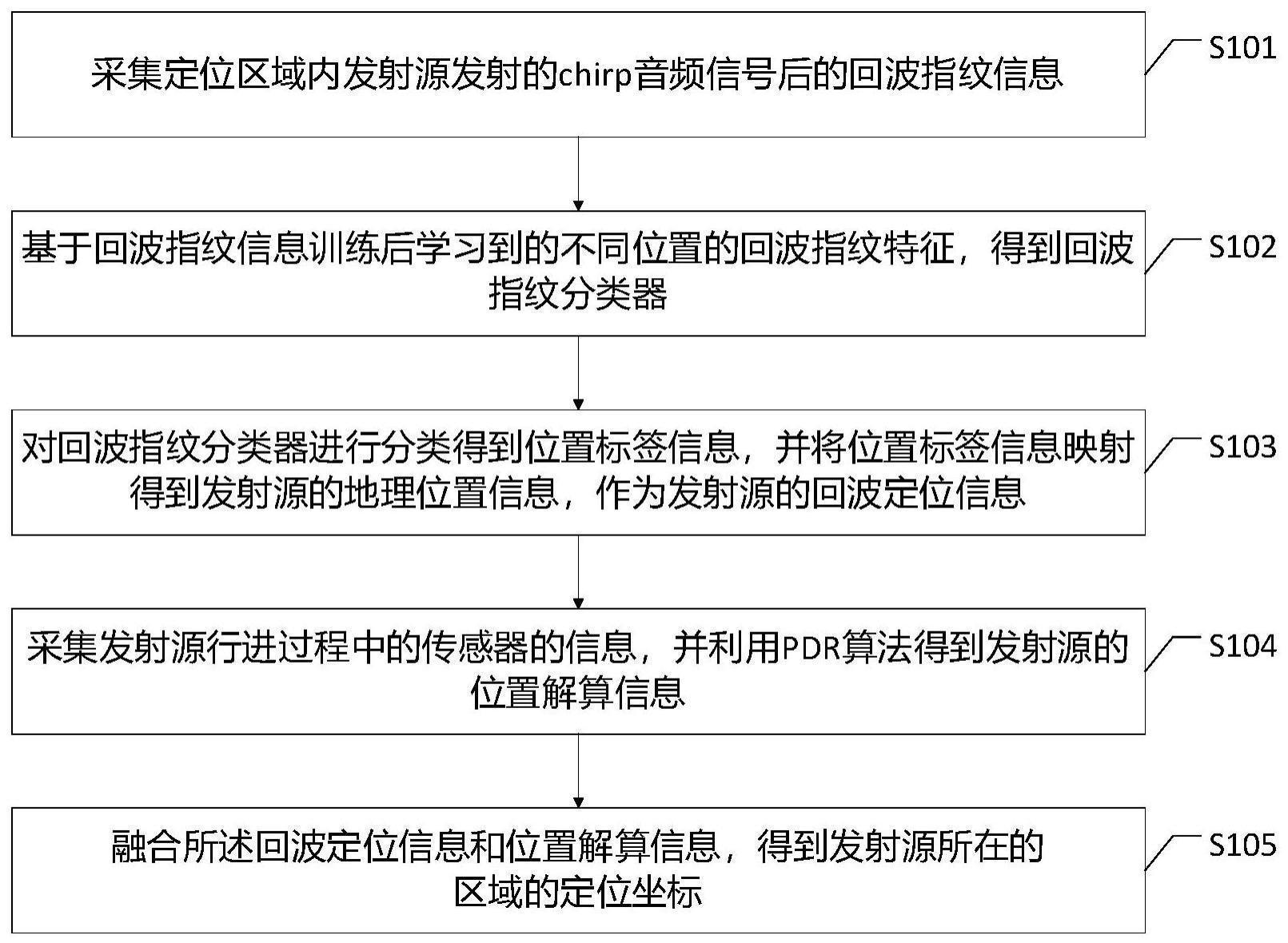
2、第一方面,本申请提供了一种室内定位方法,该方法包括步骤:采集定位区域内发射源发射的chirp音频信号后的回波指纹信息;
3、基于回波指纹信息训练后学习到的不同位置的回波指纹特征,得到回波指纹分类器;
4、对回波指纹分类器进行分类得到位置标签信息,并将位置标签信息映射得到发射源的地理位置信息,作为发射源的回波定位信息;
5、采集发射源行进过程中的传感器的信息,并利用pdr算法得到发射源的位置解算信息;
6、融合所述回波定位信息和位置解算信息,得到发射源所在的区域的定位坐标。
7、结合上述第一方面,作为一种可选的实现方式,根据粒子滤波算法,在定位区域初始化大量粒子,并计算每个粒子与观测值间的距离并赋予粒子不同的权重;
8、对所有粒子权重进行归一化处理,并过滤低权重的粒子,利用高权重的粒子重新采样形成新粒子;
9、利用所有新粒子坐标的加权求和得到发射源所在的区域的定位坐标。
10、结合上述第一方面,作为一种可选的实现方式,根据公式计算每个粒子的权重,其中(x0,y0)表示实际观测值所在的位置,(x1,y1)表示粒子所在的位置,δ表示方差,pi表示第i个粒子;
11、根据公式计算定位区域的定位坐标,其中,表示最终的定位坐标,表示第i个粒子的权重,ui表示第i个粒子的坐标。
12、结合上述第一方面,作为一种可选的实现方式,计算回波定位的坐标与pdr推算的发射源的位置坐标间的欧式距离;
13、当所述欧式距离大于第一设定阈值时,判定回波指纹分类器的分类结果出错,利用pdr推算的发射源的步长和方向信息进行粒子更新;
14、当所述欧式距离小于第二设定阈值时,判定此时pdr的推算发射源的位置坐标的误差在可控范围内,利用所述pdr推算的发射源的步长和方向信息进行粒子更新;
15、当所述欧式距离在所述第一设定阈值和所述第二设定阈值之间时,判定pdr的推算发射源的位置坐标的误差开始逐渐累积,利用回波定位的结果进行修正,并作为观测值进行粒子更新。
16、结合上述第一方面,作为一种可选的实现方式,将所述定位区域进行预设尺寸方格划分,通过手机扬声器发射的预设频率的chirp音频信号后,利用手机麦克风采集每个方格内的响应回波。
17、结合上述第一方面,作为一种可选的实现方式,对采集的回波指纹信息进行过滤,并将过滤后的响应回波,生成回波数据集,其中所述过滤包括:空白帧过滤,噪声过滤以及回波提取部分;
18、将所述数据集中wav格式的回波音频文件进行分帧和加汉明窗操作,并利用傅里叶变换得到每帧的频域信息;
19、将所述每帧的频域信息融合得到语谱图,并将所述语谱图输入到卷积神经网络中进行训练,直到模型收敛,学习到不同位置的回波指纹特征,以得到回波指纹分类器。
20、结合上述第一方面,作为一种可选的实现方式,采集发射源行进过程中的加速度传感器信息、磁力传感器信息以及陀螺仪信息;
21、根据所述加速度传感器信息,采用过零检测法进行跨步检测,并利用weinberg算法进行步长估计,以确定发射源的步数和步长;
22、根据所述加速度传感器信息、磁力传感器信息以及陀螺仪信息,确定发射源的方向角,所述方向角为发射源行走方向和地磁北极的夹角;
23、通过所述发射源的步数和步长以及方向角,利用pdr算法获取发射源的位置解算信息。
24、第二方面,本申请提供了一种室内定位装置,该装置包括:采集单元,其用于采集定位区域内发射源发射的chirp音频信号后的回波指纹信息;
25、特征提取单元,其用于基于回波指纹信息训练后学习到的不同位置的回波指纹特征,得到回波指纹分类器;
26、分类单元,其用于对回波指纹分类器进行分类得到位置标签信息,并将位置标签信息映射得到发射源的地理位置信息,作为发射源的回波定位信息;
27、计算单元,其用于采集发射源行进过程中的传感器的信息,并利用pdr算法得到发射源的位置解算信息;
28、融合单元,其用于融合所述回波定位信息和位置解算信息,得到发射源所在的区域的定位坐标。
29、第三方面,本申请还提供了一种电子设备,所述电子设备包括:处理器;存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时,实现第一方面任一项所述的方法。
30、第四方面,本申请还提供了一种计算机可读存储介质,其存储有计算机程序指令,当所述计算机程序指令被计算机执行时,使计算机执行第一方面任一项所述的方法。
31、本申请提供的一种室内定位方法、装置、设备及存储介质,该方法包括步骤:采集定位区域内发射源发射的chirp音频信号后的回波指纹信息;基于回波指纹信息训练后学习到的不同位置的回波指纹特征,得到回波指纹分类器;对回波指纹分类器进行分类得到位置标签信息,并将位置标签信息映射得到发射源的地理位置信息,作为发射源的回波定位信息;采集发射源行进过程中的传感器的信息,并利用pdr算法得到发射源的位置解算信息;融合所述回波定位信息和位置解算信息,得到发射源所在的区域的定位坐标。本申请通过数据驱动的方式完成回波指纹的特征提取,并利用深度学习的方式进行回波分类,通过回波定位信息对pdr位置解算信息进行修正,不仅无需部署任何额外的硬件设施,而且可以较好的解决pdr的误差累积问题,以低成本的代价实现了亚米级的室内定位精度。
32、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本发明。
技术特征:
1.一种室内定位方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述融合所述回波定位信息和位置解算信息,得到发射源所在的区域的定位坐标,包括:
3.根据权利要求2所述的方法,其特征在于:
4.根据权利要求2所述的方法,其特征在于,还包括:
5.根据权利要求1所述的方法,其特征在于,所述采集定位区域内发射源发射的chirp音频信号后的回波指纹信息,包括:
6.根据权利要求1所述的方法,其特征在于,所述基于回波指纹信息训练后学习到的不同位置的回波指纹特征,得到回波指纹分类器,包括:
7.根据权利要求1所述的方法,其特征在于,根据采集发射源行进过程中的信息,并利用pdr算法得到发射源的位置解算信息,包括:
8.一种室内定位装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备,包括:
10.一种计算机可读存储介质,其特征在于,其存储有计算机程序指令,当所述计算机程序指令被计算机执行时,使计算机执行根据权利要求1至7中任一项所述的方法。
技术总结
本发明公开了一种室内定位方法、装置、设备及存储介质,该方法包括步骤:采集定位区域内发射源发射的chirp音频信号后的回波指纹信息;基于回波指纹信息训练后学习到的不同位置的回波指纹特征,得到回波指纹分类器;对回波指纹分类器进行分类得到位置标签信息,并将位置标签信息映射得到发射源的地理位置信息,作为发射源的回波定位信息;采集发射源行进过程中的传感器的信息,并利用PDR算法得到发射源的位置解算信息;融合所述回波定位信息和位置解算信息,得到发射源所在的区域的定位坐标。本申请能够较好的解决PDR的误差累积问题,以低成本的代价实现了亚米级的室内定位精度。
技术研发人员:武小平,姜烁
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!