微惯导的零偏滞回效应补偿模型的构建方法和补偿方法与流程
本发明涉及微机械陀螺,具体而言,涉及一种微惯导的零偏滞回效应补偿模型的构建方法和补偿方法。
背景技术:
1、微机械惯导系统包括微机械陀螺仪、微机械加速度计、gps接收机及导航计算机等器件,其中,微机械陀螺仪作为微机械惯导系统的核心部件,用于测量载体相对于惯性空间的角速度。与激光陀螺仪、光纤陀螺仪等传统陀螺仪相比,微机械陀螺仪具有体积小、成本低、功耗小等优点,是微机械惯导系统向微小型化方向发展的关键。
2、微机械陀螺仪的主要构成材料是硅,硅材料对温度特性非常敏感,同时陀螺仪中的其他电路元件特性也会随环境温度而变化,从而对微机械陀螺仪的零偏产生影响。在导航系统中,温度变化引起的陀螺零偏误差随时间不断累积,严重的陀螺漂移会影响微惯导的姿态、速度、位移等导航参数的精确度,有效的陀螺零偏补偿、抑制陀螺漂移是提高微惯导性能指标的主要因素之一。微机械陀螺仪与环境因素的耦合机理复杂,在温度变化环境下,陀螺输出特性经常存在明显的非线性及滞回效应,其中滞回效应严重影响陀螺仪的性能,所谓的滞回效应是指当陀螺的温度环境由低温升至高温或者由高温降至低温的过程中,在某一温度点对应的陀螺零偏不是唯一的,见图1所示,温升示意见图2。
3、微机械陀螺仪通常置于微机械惯导系统内部,由于微惯导体积小、产品为密封结构,当微惯导通电后内部热量不能及时散发,导致微机械陀螺仪温度迅速升高,此时机械陀螺仪温度对应的零偏处在滞回效应的上升段。现有的零偏补偿方法往往通过长时间通电等待微惯导内部热平衡后,再采集数据测量零偏生成零偏补偿模型,这样获得的零偏补偿模型与实际应用环境下的零偏存在较大的误差。因此,现有的零偏补偿方法难以实现有效的误差补偿。
技术实现思路
1、本发明解决的问题是现有的零偏补偿方法难以实现有效的误差补偿。
2、为解决上述问题,本发明提供一种微惯导的零偏滞回效应补偿模型的构建方法,包括:
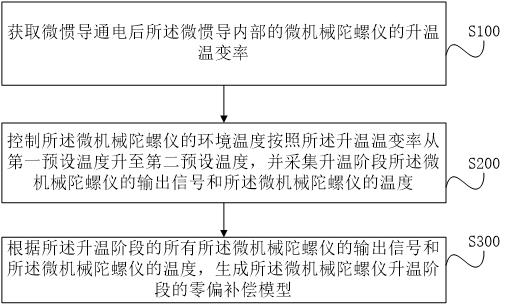
3、获取微惯导通电后所述微惯导内部的微机械陀螺仪的升温温变率;
4、控制所述微机械陀螺仪的环境温度按照所述升温温变率从第一预设温度升至第二预设温度,并采集升温阶段所述微机械陀螺仪的输出信号和所述微机械陀螺仪的温度;
5、根据所述升温阶段的所有所述微机械陀螺仪的输出信号和所述微机械陀螺仪的温度,生成所述微机械陀螺仪升温阶段的零偏补偿模型。
6、可选地,所述获取微惯导通电后所述微惯导内部的微机械陀螺仪的升温温变率包括:
7、控制所述微惯导通电第一预设时长,并获取所述微惯导内部的所述微机械陀螺仪在所述第一预设时长内的温度最小值和温度最大值;
8、获取所述温度最小值和所述温度最大值对应的时间差;
9、根据所述温度最小值和所述温度最大值之间的温度差和所述时间差,生成所述温变率。
10、可选地,所述微惯导的零偏滞回效应补偿模型的构建方法还包括:
11、获取所述微惯导处于降温工作场景后,所述微惯导内部的微机械陀螺仪的降温温变率;
12、控制所述微机械陀螺仪的环境温度,按照所述降温温变率从第三预设温度降至第四预设温度,并采集降温阶段所述微机械陀螺仪的输出信号和所述微机械陀螺仪的温度;
13、根据所述降温阶段的所有所述微机械陀螺仪的输出信号和所述微机械陀螺仪的温度,生成所述微机械陀螺仪降温阶段的零偏补偿模型。
14、可选地,所述零偏补偿模型包括二阶温度模型和一阶温变率模型。
15、可选地,所述微机械陀螺仪升温阶段的零偏补偿模型包括第一多项式模型和第二多项式模型,所述根据所述升温阶段的所有所述微机械陀螺仪的输出信号和所述微机械陀螺仪的温度,生成所述微机械陀螺仪升温阶段的零偏补偿模型包括:
16、基于第一温度范围内的所述微机械陀螺仪的输出信号和所述微机械陀螺仪的温度,对所述零偏补偿模型的模型系数进行拟合,得到所述第一多项式模型的模型系数;
17、基于第二温度范围内的所述微机械陀螺仪的输出信号和所述微机械陀螺仪的温度,对所述零偏补偿模型的模型系数进行拟合,得到所述第二多项式模型的模型系数;
18、其中,所述第一预设温度至第五预设温度为所述第一温度范围,所述第五预设温度至所述第二预设温度为所述第二温度范围,所述第五预设温度高于所述第一预设温度,且低于所述第二预设温度。
19、可选地,所述零偏补偿模型包括:
20、,
21、其中,指所述微机械陀螺仪的零偏,所述微机械陀螺仪的零偏基于所述微机械陀螺仪的输出信号确定,指零偏常数项、指零偏一次项系数、指零偏二次项系数、指零偏温变系数、指所述微机械陀螺仪的温度,指时间。
22、可选地,所述对所述零偏补偿模型的模型系数进行拟合包括:
23、采用多元线性回归方法对所述零偏补偿模型的模型系数进行拟合。
24、可选地,所述控制所述微机械陀螺仪的环境温度按照所述升温温变率从第一预设温度升至第二预设温度包括:
25、将所述微机械陀螺仪置于温箱,控制所述温箱内温度按照所述升温温变率从所述第一预设温度升至所述第二预设温度。
26、本发明还提出一种微惯导的零偏滞回效应的补偿方法,包括:
27、微惯导通电后,获取基于如上所述微惯导的零偏滞回效应补偿模型的构建方法生成的零偏补偿模型;
28、基于所述零偏补偿模型对微机械陀螺仪的零偏进行补偿。
29、本发明还提出一种微惯导系统,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如上所述微惯导的零偏滞回效应的补偿方法。
30、与现有技术相比,本发明至少具有如下所述技术效果:
31、通过基于微惯导的实际使用环境确定微惯导通电后内部的温变率,建立升温条件下微机械陀螺仪零偏与温度的零偏补偿模型,以供微机械陀螺仪在实际工作过程中,能调用该零偏补偿模型进行有效的温度补偿,从而有效规避微机械陀螺仪的零偏滞回效应,提高陀螺的零偏稳定性,进而提高微惯导的姿态及导航精度。
技术特征:
1.一种微惯导的零偏滞回效应补偿模型的构建方法,其特征在于,包括:
2.如权利要求1所述的微惯导的零偏滞回效应补偿模型的构建方法,其特征在于,所述获取微惯导通电后所述微惯导内部的微机械陀螺仪的升温温变率包括:
3.如权利要求1所述的微惯导的零偏滞回效应补偿模型的构建方法,其特征在于,还包括:
4.如权利要求1至3中任一项所述的微惯导的零偏滞回效应补偿模型的构建方法,其特征在于,所述零偏补偿模型包括二阶温度模型和一阶温变率模型。
5.如权利要求4所述的微惯导的零偏滞回效应补偿模型的构建方法,其特征在于,所述微机械陀螺仪升温阶段的零偏补偿模型包括第一多项式模型和第二多项式模型,所述根据所述升温阶段的所有所述微机械陀螺仪的输出信号和所述微机械陀螺仪的温度,生成所述微机械陀螺仪升温阶段的零偏补偿模型包括:
6.如权利要求4所述的微惯导的零偏滞回效应补偿模型的构建方法,其特征在于,所述零偏补偿模型包括:
7.如权利要求5所述的微惯导的零偏滞回效应补偿模型的构建方法,其特征在于,所述对所述零偏补偿模型的模型系数进行拟合包括:
8.如权利要求1至3中任一项所述的微惯导的零偏滞回效应补偿模型的构建方法,其特征在于,所述控制所述微机械陀螺仪的环境温度按照所述升温温变率从第一预设温度升至第二预设温度包括:
9.一种微惯导的零偏滞回效应的补偿方法,其特征在于,包括:
10.一种微惯导系统,其特征在于,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如权利要求9所述的微惯导的零偏滞回效应的补偿方法。
技术总结
本发明提供了一种微惯导的零偏滞回效应补偿模型的构建方法和补偿方法,涉及微机械陀螺技术领域,所述构建方法包括:获取微惯导通电后微惯导内部的微机械陀螺仪的升温温变率;控制微机械陀螺仪的环境温度按照升温温变率从第一预设温度升至第二预设温度,并采集升温阶段微机械陀螺仪的输出信号和微机械陀螺仪的温度;根据升温阶段的所有微机械陀螺仪的输出信号和微机械陀螺仪的温度,生成微机械陀螺仪升温阶段的零偏补偿模型,以供微机械陀螺仪在实际工作过程中,能调用该零偏补偿模型进行有效的温度补偿,从而有效规避微机械陀螺仪的零偏滞回效应,提高陀螺的零偏稳定性,进而提高微惯导的姿态及导航精度。
技术研发人员:郭光磊
受保护的技术使用者:航天星云(北京)科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!