一种基于多层地图的三维激光雷达导航方法
本发明属于无人车导航领域,更具体地,涉及一种基于多层地图的三维激光雷达导航方法。
背景技术:
1、基于三维激光雷达的无人车导航是完成目标点导航任务最可靠的导航方法之一。近年来,导航技术在无人车自主作业中得到应用与快速发展。目前较为流行的导航方法有采用视觉传感器、惯性传感器、激光雷达或者gps。其中视觉传感器对光线敏感且不适用于大规模环境下的导航场景,惯性传感器随着时间推移累计误差不断增加,而gps通常只在室外空旷场景下才能完成导航任务。相比之下,随着激光雷达的成本降低,在室外或室内场景下采用基于三维激光雷达的方法完成导航任务成为主流的研究方向。
2、导航技术与环境表示法相关。对于基于三维激光雷达的地图表示采用原始点云地图表示,其信息是冗余的,且有效信息较少,其中包括拓扑信息和占用信息。在现有的导航系统中,环境表示方法可以分为以下两类:不能表示三维信息的二维网格地图和基于多层二维结构的2.5d地图。通常一个高效的地图表示方法具有拓扑信息清晰和更新简单等特点。此外,在导航过程中,若忽略无人车自身尺寸进行路径规划时,极易出现与障碍物发生碰撞的情况。
3、专利文献cn114415661a提出了一种基于压缩三维空间点云的平面激光slam与导航方法,该方法将三维点云数据压缩至二维平面后得到平面点云数据,基于平面点云数据完成导航控制。显然该方法所得到的地图缺少拓扑信息,障碍物信息冗余,且存在点云数据丢失。
4、专利文献cn110262518b介绍了一种基于轨迹拓扑地图和避障的车辆导航方法,地图表示较简单且规划器单一,所规划的路径不满足车辆运动学约束。同时未考虑到小车的自身尺寸,存在小车与障碍物发生碰撞的风险。
5、因此,为实现无人车的高效导航,急需一种基于地图信息的三维激光雷达导航方法,利用该方法能够在不同场景下获得丰富的环境信息,同时具有较好的实时性和鲁棒性,避免与周边障碍物发生碰撞,以实现无人车的自主导航。
技术实现思路
1、针对现有技术存在的缺陷和不足,本发明提出了一种基于多层地图的三维激光雷达导航方法。该方法通过搭载三维激光雷达的无人车采集周围环境信息,建立障碍物优化后的多层地图,并在此基础上采用三层局部规划器完成目标点导航,同时考虑到无人车自身尺寸建立等效模型。该方法不需要额外的传感器,场景适用性强,高效地完成自主导航。
2、为了实现上述目的,本发明采用以下技术方案完成:
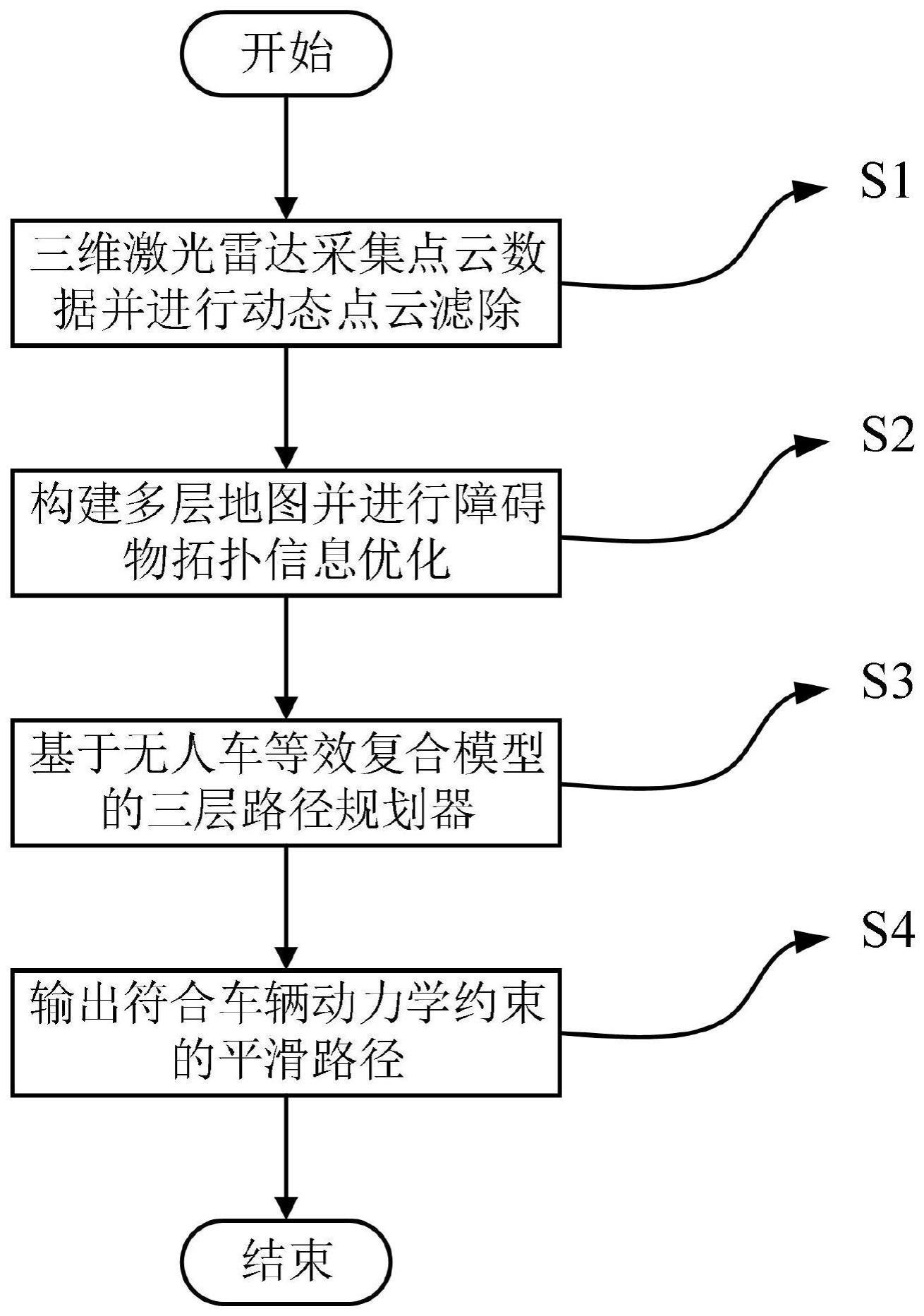
3、步骤1:采用多线激光雷达采集外界点云数据,并进行动态点云去除处理;
4、步骤2:基于处理后的点云数据构建多层地图,地图共包括全局拓扑地图,中间栅格地图和局部地形地图;
5、步骤3:在构建多层地图后得到环境的先验信息,并通过激光slam技术完成无人车自身定位,在此基础上采用三层路径器以完成目标点导航任务,其中第一层全局规划器在全局拓扑地图基础上大致规划了一条可以通行由若干个路径点组成的路径,第二层中间规划器在全局规划器规划的两个航路点之间进行规划,在中间栅格地图的基础上得到符合车辆动力学约束的平滑路径,局部规划者在局部地图地图的基础上执行中间规划者规划的路径,避免局部碰撞。
6、进一步地,在全局拓扑地图中对障碍物的形状进行优化,首先将障碍物用多边形拟合,然后将多边形的顶点提出来,判断顶点与相邻两顶点之间的欧式距离d,如果d小于设定阈值则将该顶点作为冗余点并从障碍物多边形中删除,否则保留该顶点,最后依次遍历判断所有障碍物的顶点后便得到了优化后的障碍物多边形。
7、进一步地,第一层全局规划器在全局拓扑地图基础上大致规划了一条可以通行由若干个路径点组成的路径,第二层中间规划器在全局规划器规划的两个航路点之间进行规划,在中间栅格地图的基础上得到符合车辆动力学约束的平滑路径,局部规划者在局部地图地图的基础上执行中间规划者规划的路径,避免局部碰撞,
8、进一步地,对于全局规划中的碰撞检测,首先将建立起无人车的等效复合模型,该模型由半圆和线段组成,然后选取无人车中间线段作为无人车等效碰撞线,无人车防碰撞距离略大于无人车宽度一半,最后判断无人车中间段与全局拓扑地图中的节点之间的欧式距离是否大于无人车防碰撞距离,如果大于则说明无人车将与障碍物碰撞,反之无人车不会与障碍物碰撞。
9、本发明的有益效果为:
10、1、本发明仅利用三维激光雷达采集周围环境信息,相比视觉方法,其范围更广,场景适应能力性强;
11、2、本发明所提出的多层地图构建方法,充分提取了拓扑信息,且优化了障碍物形状保留了其特征信息。所获得的多层地图准确而完整地表达了周围环境,提高了路径规划的安全性;
12、3、本发明所提出的三层规划器有效地规划出一条高质量的符合车辆动力学约束的平滑路径,该路径基于无人车等效复合模型大大提高了无人车的避障能力,同时路径长度较优并提高了导航效率;
13、4、本发明所提出的三维激光雷达导航方法中在嵌入式设备多层地图更新最长时间约为11ms,导航算法规划时间最长约为45ms,具有较好的实时性,可高效地完成导航任务。
技术特征:
1.一种基于多层地图的三维激光雷达导航方法,其特征在于该方法采用基于三维点云数据的多层地图构建实现高效导航,包括以下步骤:
2.如权利要求1所述的基于多层地图的三维激光雷达导航方法,其步骤2特征在于:
3.如权利要求1所述的基于多层地图的三维激光雷达导航方法,其步骤3特征在于:
4.如权利要求1所述的基于多层地图的三维激光雷达导航方法,其步骤3特征在于:
技术总结
本发明公开了一种基于多层地图的三维激光雷达导航方法,该方法包括:S1:采用多线激光雷达采集外界点云数据,并进行动态点云去除处理;S2:基于处理后的点云数据构建多层地图,地图共包括全局拓扑地图,中间栅格地图和局部地形地图;S3:在构建多层地图后得到环境的先验信息,并通过激光SLAM技术完成无人车自身定位,在此基础上采用三层路径器以完成目标点导航任务,其中对于全局规划中的碰撞检测,采用无人车等效复合模型中的线段部分与拓扑节点的距离进行判断;S4:输出符合车辆动力学约束的平滑路径。本发明解决了现有技术中地图信息存在丢失和导航过程中易于障碍物发生碰撞等问题,实现了无人车基于地图的高效三维导航。
技术研发人员:张驰洲,吴敏杰,陈明松,蔺永诚,王冠强,高百会,王秋
受保护的技术使用者:中南大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!