一种应用于露天矿山无人驾驶的多激光雷达自动标定方法与流程
本发明涉及无人驾驶的多激光雷达,特别涉及一种应用于露天矿山无人驾驶的多激光雷达自动标定方法。
背景技术:
1、多激光雷达标定方法常采用非自动标定方法,比如基于人眼观察,手动调参进行尝试,另外还有以两两激光雷达扫描到的同区域激光点云做配准,得到标定结果,而点云配准算法都需要一个较好的初始值,否则不能收敛,初值获取同样通过手动调参的方式实现;
2、现有技术的不足之处在于,目前的非自动标定过程复杂,效率低、精度差,会影响后续感知融合与建图效果。
技术实现思路
1、本发明的目的克服现有技术存在的不足,为实现以上目的,采用一种应用于露天矿山无人驾驶的多激光雷达自动标定方法,以解决上述背景技术中提出的问题。
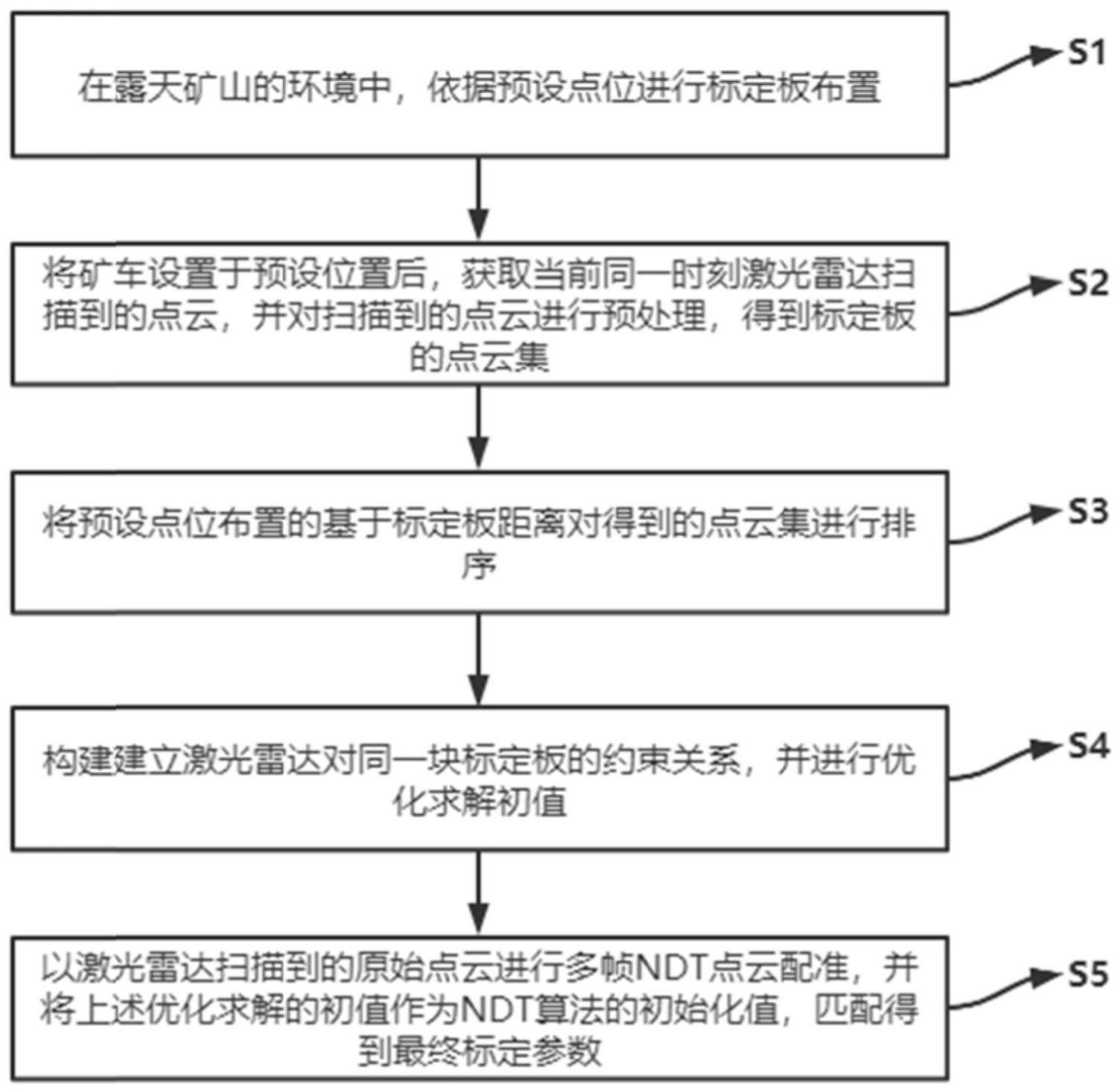
2、一种应用于露天矿山无人驾驶的多激光雷达自动标定方法,具体步骤包括:
3、步骤s1、在露天矿山的环境中,依据预设点位进行标定板布置;
4、步骤s2、将矿车设置于预设位置后,获取当前同一时刻激光雷达扫描到的点云,并对扫描到的点云进行预处理,得到标定板的点云集;
5、步骤s3、将预设点位布置的基于标定板距离对得到的点云集进行排序;
6、步骤s4、构建建立激光雷达对同一块标定板的约束关系,并进行优化求解初值;
7、步骤s5、以激光雷达扫描到的原始点云进行多帧ndt点云配准,并将上述优化求解的初值作为ndt算法的初始化值,匹配得到最终标定参数。
8、作为本发明的进一步的方案:所述步骤s2的具体步骤包括:
9、将矿车设置于预设位置后,获取当前同一时刻激光雷达扫描到的点云;
10、对获取的点云基于距离阈值进行点云滤除操作,所述点云包括非标定板点云、地面点云,以及周围杂乱目标点云;
11、在滤除操作后的点云进行聚类和分割,得到标定板的点云集。
12、作为本发明的进一步的方案:所述步骤s3的具体步骤包括:
13、获取标定板的点云集各标定板的质心坐标,计算质心到激光雷达的距离,根据该距离对标定板的点云集进行排序,获得最近的标定板作为第一标定板;
14、以第一标定板为节点,计算出其余标定板质心与第一标定板质心的距离,根据两质心的距离对标定板的点云集进行排序。
15、作为本发明的进一步的方案:所述步骤s4的具体步骤包括:
16、步骤s41、对排序后的标定板的点云集合进行平面拟合,提取各标定板的法向量;
17、n={{n1,n2,…,nk}1,{n1,n2,…,nk}2,…,{n1,n2,…,nk}m}k,m∈r;
18、nk=(ak,bk,ck)a,b,c,k∈r;
19、其中,n为各激光雷达标定板法向量的集合,k代表标定板数量,m代表激光雷达数量,nk代表对第k个标定板提取到的法向量;
20、以激光雷达扫描到的同一编号的标定板的法向量夹角作为一个损失值,通过lm算法,迭代优化求解旋转矩阵初值r*;
21、通过两个激光雷达提取第一标定板的法向量n1、n2,n1=(a1,b1,c1),n2经过转矩阵r变换之后得到(a2,b2,c2),计算n2与n1的夹角,计算公式为:
22、
23、其中,推导出最小二乘代价函数的公式为:
24、
25、步骤s42、以激光雷达扫描到的同一编号的标定板的质心距离作为另一个损失值,通过lm算法,迭代优化求解平移矩阵初值t*;
26、d={d1,d2…dk}k∈r;
27、其中,d记为激光雷达扫描到同一块标定板的质心距离集合,k代表标定板数目,dk代表第k个标定板计算出的质心距离;
28、通过两个激光雷达获取的第一标定板的质心点p1、p2,p1=(x1,y1,z1),p2经过平移矩阵t变换后的坐标为(x2,y2,z2),计算p2与p1的距离,计算公式为:
29、
30、其中,推导出最小二乘代价函数的公式为:
31、
32、作为本发明的进一步的方案:所述步骤s5的具体步骤包括:
33、以激光雷达扫描到的原始点云进行多帧ndt点云配准,将步骤s4优化求解的r*、t*作为ndt算法的初始化值,匹配得到最终标定参数r、t。
34、与现有技术相比,本发明存在以下技术效果:
35、采用上述的技术方案,通过建立特定的标定场地,自动分割标定板点云,提取特征。根据距离阈值对标定板排序。对激光雷达扫描到的同一块标定板的法向量与质心距离作为损失值,优化求解初始外参,无需手动获得。完全自动化标定,适用于量产车型下线标定,提升效率。从而解决了现有技术中非自动标定过程复杂,效率低、精度差,会影响后续感知融合与建图效果的问题。
技术特征:
1.一种应用于露天矿山无人驾驶的多激光雷达自动标定方法,其特征在于,具体步骤包括:
2.根据权利要求1所述一种应用于露天矿山无人驾驶的多激光雷达自动标定方法,其特征在于,所述步骤s2的具体步骤包括:
3.根据权利要求1所述一种应用于露天矿山无人驾驶的多激光雷达自动标定方法,其特征在于,所述步骤s3的具体步骤包括:
4.根据权利要求1所述一种应用于露天矿山无人驾驶的多激光雷达自动标定方法,其特征在于,所述步骤s4的具体步骤包括:
5.根据权利要求6所述一种应用于露天矿山无人驾驶的多激光雷达自动标定方法,其特征在于,所述步骤s5的具体步骤包括:
技术总结
本发明公开了一种应用于露天矿山无人驾驶的多激光雷达自动标定方法,包括在露天矿山的环境中,预先布置标定板;将矿车设置于预设位置后,获取当前同一时刻激光雷达扫描到的点云,并对扫描到的点云进行预处理,得到标定板的点云集;将预设点位布置的基于标定板距离对得到的点云集进行排序;构建建立激光雷达对同一块标定板的约束关系,并进行优化求解初值;以激光雷达扫描到的原始点云进行多帧NDT点云配准,并将上述优化求解的初值作为NDT算法的初始化值,匹配得到最终标定参数。本发明通过上述自动标定方法,能够自动化特征提取,无需手动提取标定板特征,自动获取激光雷达之间的外参初始值,无需手动调参,且不受激光雷达安装误差影响。
技术研发人员:占也,袁广驰,鲍时超,王炜杰,张帅乾
受保护的技术使用者:安徽海博智能科技有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!